TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025140202
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024039427
出願日
2024-03-13
発明の名称
ワーク搬送装置及びワーク搬送方法
出願人
株式会社 東京ウエルズ
代理人
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20250919BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】トレイに設けられた収容部内にワークを正常な姿勢で収容できるワーク搬送装置及びワーク搬送方法を提供する。
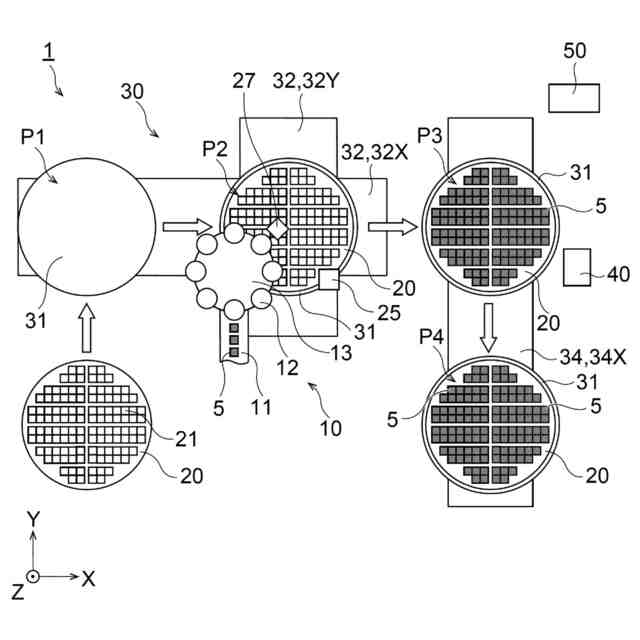
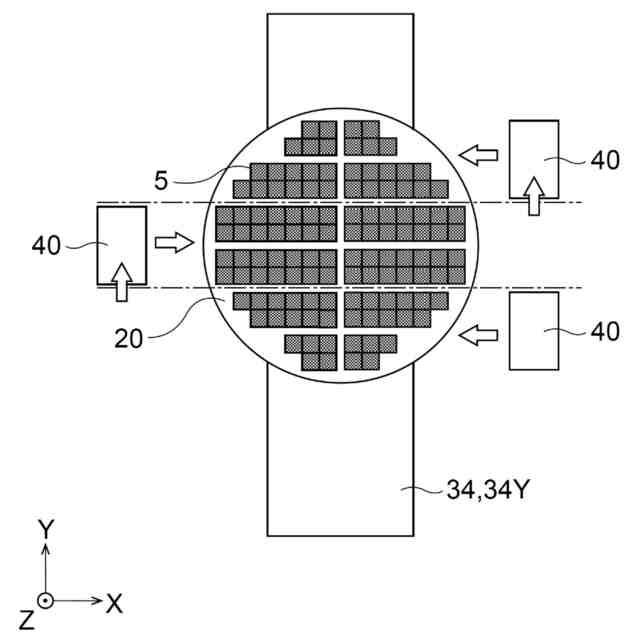
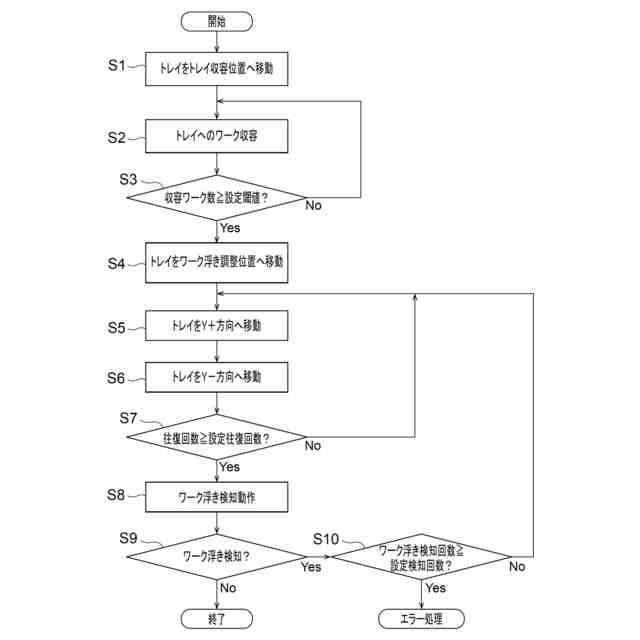
【解決手段】ワーク搬送装置は、搬送機構と、複数の収容部を有するトレイと、トレイ検知装置と、計数装置と、移動機構と、制御部と、を含む。制御部は、トレイ検知装置によりトレイがワーク収容位置に位置することを検知したとき、搬送機構を制御して、複数の収容部内にワークを収容し、計数装置により数えたワークの数が予め設定した閾値に達したとき、移動機構を制御して、トレイをワーク収容位置とは異なるワーク浮き調整位置に移動させると共に、新たなトレイをワーク収容位置に移動させ、且つ計数装置により数えたワークの数をリセットし、ワーク浮き調整位置に移動させたトレイを、水平面内における所定方向に急加速及び急減速するように往復移動させる。
【選択図】図1
特許請求の範囲
【請求項1】
ワークを吸着する吸着ノズルを含み、前記吸着ノズルによりワークを吸着して搬送する搬送機構と、
前記搬送機構により搬送された前記ワークを収容する複数の収容部を有するトレイと、
前記トレイがワーク収容位置に位置することを検知するトレイ検知装置と、
前記収容部に収容される前記ワークの数を数える計数装置と、
前記トレイを移動させる移動機構と、
制御部と、を備え、
前記制御部は、前記トレイ検知装置により前記トレイが前記ワーク収容位置に位置することを検知したとき、前記搬送機構を制御して、複数の前記収容部内に前記ワークを収容し、前記計数装置により数えた前記ワークの数が予め設定した閾値に達したとき、前記移動機構を制御して、前記トレイを前記ワーク収容位置とは異なるワーク浮き調整位置に移動させると共に、新たなトレイを前記ワーク収容位置に移動させ、且つ前記計数装置により数えた前記ワークの数をリセットし、前記ワーク浮き調整位置に移動させた前記トレイを、水平面内における所定方向に急加速及び急減速するように往復移動させる、ワーク搬送装置。
続きを表示(約 830 文字)
【請求項2】
前記制御部は、前記移動機構を制御して、前記トレイの往復移動の回数が予め設定した設定往復回数に達するまで、前記トレイを繰り返し往復移動させる、請求項1に記載のワーク搬送装置。
【請求項3】
前記トレイの往復移動の後、前記収容部に収容された前記ワークの浮きを検知するワーク浮き検知装置を更に備え、
前記ワーク浮き検知装置により前記ワークの浮きを検知した場合、前記制御部は、前記移動機構を制御して、再度、前記トレイを往復移動させる、請求項1又は2に記載のワーク搬送装置。
【請求項4】
前記制御部は、前記移動機構を制御して、前記ワーク浮き検知装置による検知回数が予め設定した設定検知回数に達するまで、前記トレイを繰り返し往復移動させる、請求項3に記載のワーク搬送装置。
【請求項5】
前記検知回数が前記設定検知回数に達した場合、前記制御部は、前記ワーク搬送装置の停止又は警報の発報を含むエラー処理を実行する、請求項4に記載のワーク搬送装置。
【請求項6】
トレイ検知装置によりトレイがワーク収容位置に位置することを検知したとき、吸着ノズルによりワークを吸着して搬送し、前記トレイに設けられた複数の収容部内に前記ワークを収容する工程と、
前記収容部に収容される前記ワークの数を計数装置により数える工程と、
前記計数装置により数えた前記ワークの数が予め設定した閾値に達したとき、移動機構により、前記トレイを前記ワーク収容位置とは異なるワーク浮き調整位置に移動させると共に、新たなトレイを前記ワーク収容位置に移動させ、且つ前記計数装置により数えた前記ワークの数をリセットする工程と、
移動機構により、前記ワーク浮き調整位置に移動させた前記トレイを、水平面内における所定方向に急加速及び急減速するように往復移動させる工程と、を含む、ワーク搬送方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ワーク搬送装置及びワーク搬送方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
例えば特許文献1に開示されているように、ワーク(電子部品)を搬送するワーク搬送装置が知られている。ワーク搬送装置は、吸着ノズルによりワークを吸着して搬送し、トレイに設けられた収容部内にワークを収容する。
【先行技術文献】
【特許文献】
【0003】
特開2021-50091号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
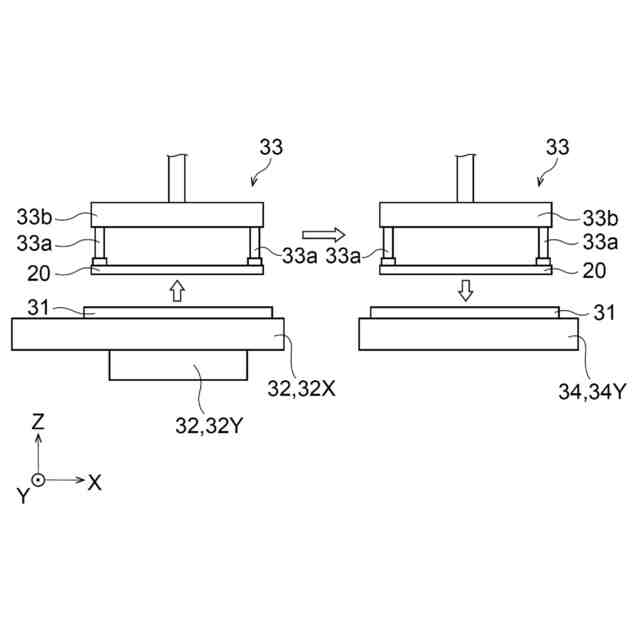
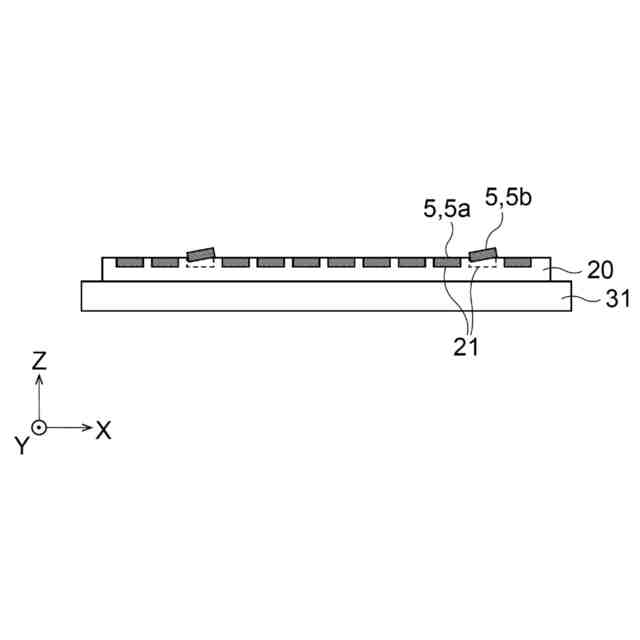
ワーク搬送装置によりトレイの収容部内にワークを収容する際、トレイとワークとの衝突を回避するため、トレイの上面付近においてワークを吸着ノズルから解放し、ワークを収容部に向けて落下させる。ここで、ワークの落下姿勢が安定しないことから、トレイの収容部内にワークが正常な姿勢で収容されない場合がある。
【0005】
本開示は、上記に鑑み、トレイに設けられた収容部内にワークを正常な姿勢で収容できるワーク搬送装置及びワーク搬送方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の実施形態は、以下の[1]~[6]に関する。
【0007】
[1] ワークを吸着する吸着ノズルを含み、前記吸着ノズルによりワークを吸着して搬送する搬送機構と、
前記搬送機構により搬送された前記ワークを収容する複数の収容部を有するトレイと、
前記トレイがワーク収容位置に位置することを検知するトレイ検知装置と、
前記収容部に収容される前記ワークの数を数える計数装置と、
前記トレイを移動させる移動機構と、
制御部と、を備え、
前記制御部は、前記トレイ検知装置により前記トレイが前記ワーク収容位置に位置することを検知したとき、前記搬送機構を制御して、複数の前記収容部内に前記ワークを収容し、前記計数装置により数えた前記ワークの数が予め設定した閾値に達したとき、前記移動機構を制御して、前記トレイを前記ワーク収容位置とは異なるワーク浮き調整位置に移動させると共に、新たなトレイを前記ワーク収容位置に移動させ、且つ前記計数装置により数えた前記ワークの数をリセットし、前記ワーク浮き調整位置に移動させた前記トレイを、水平面内における所定方向に急加速及び急減速するように往復移動させる、ワーク搬送装置。
【0008】
[2] 前記制御部は、前記移動機構を制御して、前記トレイの往復移動の回数が予め設定した設定往復回数に達するまで、前記トレイを繰り返し往復移動させる、[1]に記載のワーク搬送装置。
【0009】
[3] 前記トレイの往復移動の後、前記収容部に収容された前記ワークの浮きを検知するワーク浮き検知装置を更に備え、
前記ワーク浮き検知装置により前記ワークの浮きを検知した場合、前記制御部は、前記移動機構を制御して、再度、前記トレイを往復移動させる、[1]又は[2]に記載のワーク搬送装置。
【0010】
[4] 前記制御部は、前記移動機構を制御して、前記ワーク浮き検知装置による検知回数が予め設定した設定検知回数に達するまで、前記トレイを繰り返し往復移動させる、[3]に記載のワーク搬送装置。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社 東京ウエルズ
部品収納体成形装置
3日前
株式会社 東京ウエルズ
テープ送り装置及びテーピング機
5日前
株式会社 東京ウエルズ
テープ送り装置及びテーピング機
5日前
株式会社 東京ウエルズ
学習装置、学習方法及び学習プログラム
2日前
株式会社 東京ウエルズ
電子部品収容装置及び電子部品収容方法
4日前
株式会社 東京ウエルズ
画像検査装置、画像検査方法及び画像検査プログラム
9日前
個人
固定補助具
1か月前
個人
折りたたみ工具
1か月前
川崎重工業株式会社
ロボット
11日前
株式会社三協システム
製函機
1か月前
株式会社三協システム
移載装置
1か月前
株式会社不二越
ロボット
10日前
CKD株式会社
把持装置
1か月前
株式会社竹中工務店
補助セット
10日前
川崎重工業株式会社
ハンド
2日前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
ロボット操作装置
1か月前
株式会社ミクロブ
把持装置
1か月前
日本精工株式会社
締結用工具
1か月前
SMC株式会社
着脱装置
1か月前
太陽パーツ株式会社
アシストスーツ
1か月前
トヨタ自動車株式会社
カプラ接続治具
1か月前
株式会社不二越
移動ロボットシステム
13日前
工機ホールディングス株式会社
作業機
2日前
ARMA株式会社
ジョイントフレーム
1か月前
トヨタ自動車株式会社
ロボット
5日前
本田技研工業株式会社
装置
16日前
株式会社不二越
エッジ仕上げ装置
23日前
川崎重工業株式会社
塗装システム
2日前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
ロボットシステム
1か月前
トヨタ自動車株式会社
歩行ロボット
1か月前
株式会社不二越
垂直多関節ロボット
24日前
トヨタ自動車株式会社
軌道生成装置
5日前
工機ホールディングス株式会社
作業機
2日前
シンフォニアテクノロジー株式会社
搬送装置
13日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ


































