TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025126639
公報種別
公開特許公報(A)
公開日
2025-08-29
出願番号
2024022969
出願日
2024-02-19
発明の名称
人力駆動車用の制御装置
出願人
株式会社シマノ
代理人
個人
,
個人
主分類
B62M
9/123 20100101AFI20250822BHJP(鉄道以外の路面車両)
要約
【課題】ディレーラの変速動作を好適に行える人力駆動車用の制御装置を提供する。
【解決手段】人力駆動車用の制御装置の制御部は、第1パラメータおよび第2パラメータに応じて制御状態を第1制御状態と第2制御状態との間において切り替えるように構成され、制御状態が第1制御状態かつペダリング状態が所定ペダリング状態の場合、ディレーラが伝達体を操作することによって変速比率を変更するように伝達体を駆動させるためにモータを制御するように構成され、制御状態が第2制御状態かつペダリング状態が所定ペダリング状態の場合、第1制御状態かつペダリング状態が所定ペダリング状態の場合よりもモータによる伝達体の駆動を抑制するように構成され、第1パラメータは第1方向に関する第1加速度および第1傾斜角度の少なくとも1つを含み、第2パラメータは第2方向に関する第2加速度および第2傾斜角度の少なくとも1つを含む。
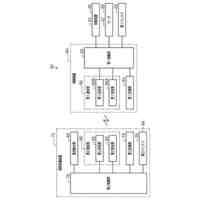
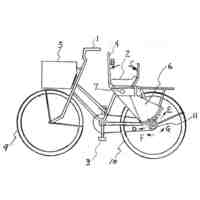
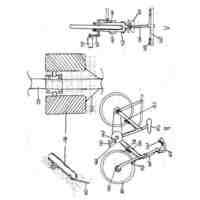
【選択図】図2
特許請求の範囲
【請求項1】
人力駆動車用の制御装置であって、
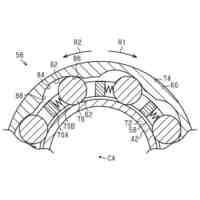
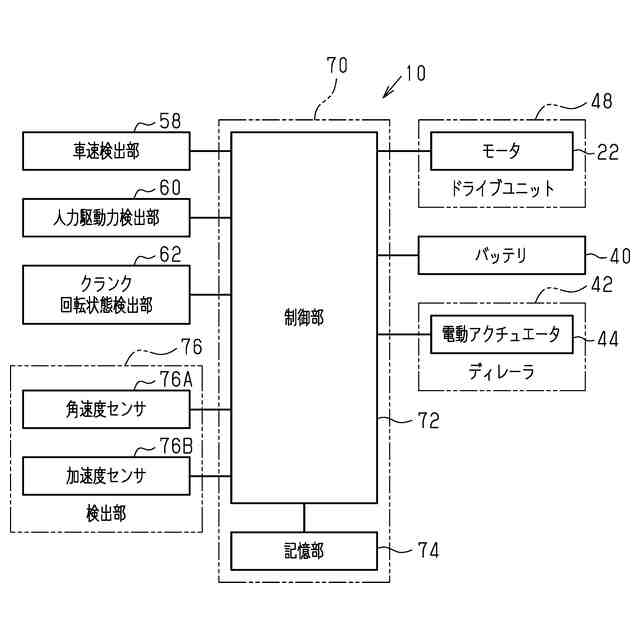
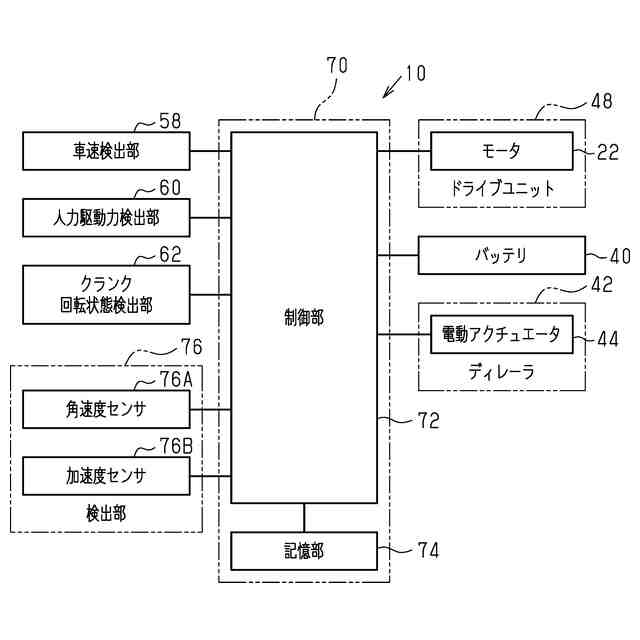
前記人力駆動車は、クランク軸と、前記クランク軸に接続される第1回転体と、車輪と、前記車輪に接続される第2回転体と、前記第1回転体および前記第2回転体に係合して、前記第1回転体と前記第2回転体との間において駆動力を伝達するように構成される伝達体と、前記クランク軸の回転速度に対する前記車輪の回転速度の変速比率を変更するために前記伝達体を操作するように構成されるディレーラと、前記伝達体を駆動するように構成されるモータと、を含み、
前記モータを制御するように構成される制御部を備え、
前記制御部は、
第1制御状態および第2制御状態を含む複数の制御状態から選択された制御状態において、前記モータを制御するように構成され、
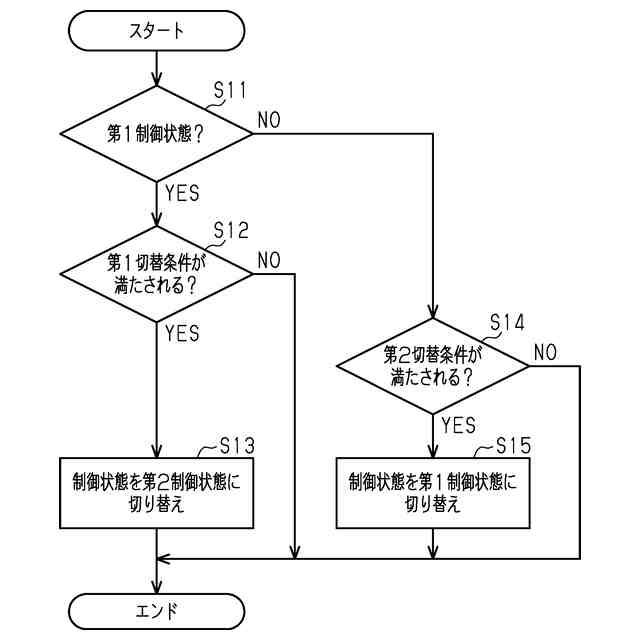
第1パラメータおよび第2パラメータに応じて、前記制御状態を前記第1制御状態と前記第2制御状態との間において切り替えるように構成され、
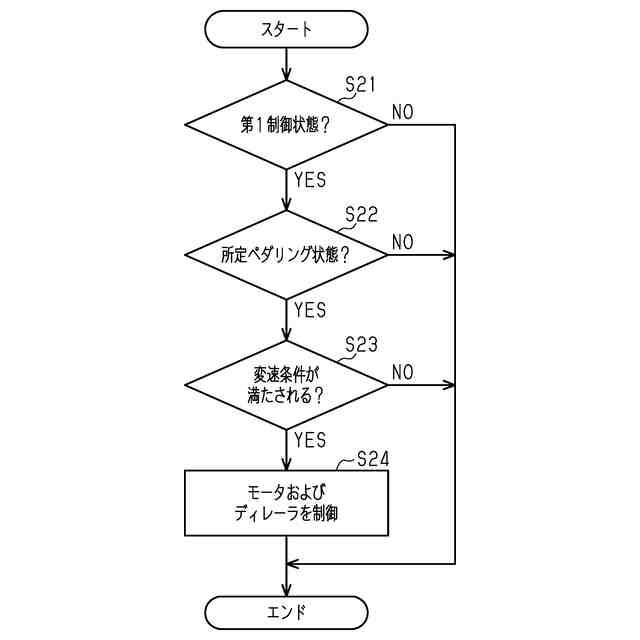
前記制御状態が前記第1制御状態かつペダリングに関するペダリング状態が所定ペダリング状態の場合、前記ディレーラが前記伝達体を操作することによって前記変速比率を変更するように前記伝達体を駆動させるために前記モータを制御するように構成され、
前記制御状態が前記第2制御状態かつ前記ペダリング状態が前記所定ペダリング状態の場合、前記制御状態が前記第1制御状態かつ前記ペダリング状態が前記所定ペダリング状態の場合よりも前記モータによる前記伝達体の駆動を抑制するように構成され、
前記第1パラメータは、前記人力駆動車の第1方向に関する前記人力駆動車の第1加速度、および、前記第1方向に関する前記人力駆動車の第1傾斜角度の少なくとも1つを含み、
前記第2パラメータは、前記第1方向とは異なる前記人力駆動車の第2方向に関する前記人力駆動車の第2加速度、および、前記第2方向に関する前記人力駆動車の第2傾斜角度の少なくとも1つを含む、制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記制御部は、前記第2制御状態において、前記第1パラメータが第1値以上かつ前記第2パラメータが第2値以上になると、前記第2制御状態から前記第1制御状態に切り替えるように構成される、請求項1に記載の制御装置。
【請求項3】
前記制御部は、前記第1パラメータ、前記第2パラメータ、および、車速に応じて、前記制御状態を前記第1制御状態と前記第2制御状態との間において切り替えるように構成される、請求項1に記載の制御装置。
【請求項4】
前記制御部は、前記第1パラメータ、前記第2パラメータ、および、前記車速の変動に応じて、前記制御状態を前記第1制御状態と前記第2制御状態との間において切り替えるように構成される、請求項3に記載の制御装置。
【請求項5】
前記制御部は、前記第1パラメータ、前記第2パラメータ、および、前記クランク軸の回転速度に応じて、前記制御状態を前記第1制御状態と前記第2制御状態との間において切り替えるように構成される、請求項1に記載の制御装置。
【請求項6】
前記制御部は、前記第1パラメータ、前記第2パラメータ、および、前記クランク軸に入力される人力駆動力に応じて、前記制御状態を前記第1制御状態と前記第2制御状態との間において切り替えるように構成される、請求項1に記載の制御装置。
【請求項7】
前記制御部は、前記第1パラメータ、前記第2パラメータ、および、第3パラメータに応じて、前記制御状態を前記第1制御状態と前記第2制御状態との間において切り替えるように構成され、
前記第3パラメータは、前記第1方向および前記第2方向とは異なる前記人力駆動車の第3方向に関する前記人力駆動車の第3加速度、および、前記第3方向に関する前記人力駆動車の第3傾斜角度の少なくとも1つを含む、請求項1に記載の制御装置。
【請求項8】
前記第1方向は、前記第2方向および前記第3方向と直交し、
前記第2方向は、前記第3方向と直交する、請求項7に記載の制御装置。
【請求項9】
前記第1パラメータは、前記第1加速度を含み、
前記第2パラメータは、前記第2加速度を含み、
前記第3パラメータは、前記第3加速度を含み、
前記制御部は、前記第2制御状態において、前記第1加速度、前記第2加速度、および、前記第3加速度の合力が所定合力範囲外になると、前記第2制御状態から前記第1制御状態に切り替えるように構成される、請求項8に記載の制御装置。
【請求項10】
前記第1方向および前記第2方向の一方は、前記人力駆動車のロール軸と平行する、請求項1に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、人力駆動車用の制御装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
例えば、特許文献1に開示されている人力駆動車用の制御装置は、モータによって伝達体を駆動することによって、ディレーラの変速動作を行う。
【先行技術文献】
【特許文献】
【0003】
米国特許出願公開第2016/0052594号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示の目的の1つは、ディレーラが変速動作を好適に行える人力駆動車用の制御装置を提供することである。
【課題を解決するための手段】
【0005】
本開示の第1側面に従う制御装置は、人力駆動車用の制御装置であって、前記人力駆動車は、クランク軸と、前記クランク軸に接続される第1回転体と、車輪と、前記車輪に接続される第2回転体と、前記第1回転体および前記第2回転体に係合して、前記第1回転体と前記第2回転体との間において駆動力を伝達するように構成される伝達体と、前記クランク軸の回転速度に対する前記車輪の回転速度の変速比率を変更するために前記伝達体を操作するように構成されるディレーラと、前記伝達体を駆動するように構成されるモータと、を含み、前記モータを制御するように構成される制御部を備え、前記制御部は、第1制御状態および第2制御状態を含む複数の制御状態から選択された制御状態において、前記モータを制御するように構成され、第1パラメータおよび第2パラメータに応じて、前記制御状態を前記第1制御状態と前記第2制御状態との間において切り替えるように構成され、前記制御状態が前記第1制御状態かつペダリングに関するペダリング状態が所定ペダリング状態の場合、前記ディレーラが前記伝達体を操作することによって前記変速比率を変更するように前記伝達体を駆動させるために前記モータを制御するように構成され、前記制御状態が前記第2制御状態かつ前記ペダリング状態が前記所定ペダリング状態の場合、前記制御状態が前記第1制御状態かつ前記ペダリング状態が前記所定ペダリング状態の場合よりも前記モータによる前記伝達体の駆動を抑制するように構成され、前記第1パラメータは、前記人力駆動車の第1方向に関する前記人力駆動車の第1加速度、および、前記第1方向に関する前記人力駆動車の第1傾斜角度の少なくとも1つを含み、前記第2パラメータは、前記第1方向とは異なる前記人力駆動車の第2方向に関する前記人力駆動車の第2加速度、および、前記第2方向に関する前記人力駆動車の第2傾斜角度の少なくとも1つを含む。
第1側面の制御装置によれば、ペダリング状態が所定ペダリング状態の場合、第1加速度および第1角速度の少なくとも1つと、第2加速度および第2角速度の少なくとも1つとに応じて、モータによる伝達体の駆動を抑制できる。したがって、制御部が、第1加速度および第1角速度の少なくとも1つと、第2加速度および第2角速度の少なくとも1つとが、ディレーラの変速動作に好適ではない場合には、ディレーラの変速動作を抑制できるため、ディレーラが変速動作を好適に行える。第1側面の制御装置によれば、複数の方向に関するパラメータに応じて、制御状態を切り替えるため、1つのパラメータを用いるよりも正確に人力駆動車の状態がディレーラの変速動作に好適ではないか否かを判定できる。
【0006】
本開示の第1側面に従う第2側面の制御装置において、前記制御部は、前記第2制御状態において、前記第1パラメータが第1値以上かつ前記第2パラメータが第2値以上になると、前記第2制御状態から前記第1制御状態に切り替えるように構成される。
第2側面の制御装置によれば、第1パラメータが第1値以上かつ第2パラメータが第2値以上になると、第2制御状態から第1制御状態に切り替えられるため、人力駆動車が大きく動くような人力駆動車の走行時には、制御状態を第1制御状態にしやすい。
【0007】
本開示の第1または第2側面に従う第3側面の制御装置において、前記制御部は、前記第1パラメータ、前記第2パラメータ、および、車速に応じて、前記制御状態を前記第1制御状態と前記第2制御状態との間において切り替えるように構成される。
第3側面の制御装置によれば、第1パラメータ、第2パラメータ、および、車速に応じて、制御状態を第1制御状態と第2制御状態との間において切り替えできる。
【0008】
本開示の第3側面に従う第4側面の制御装置において、前記制御部は、前記第1パラメータ、前記第2パラメータ、および、前記車速の変動に応じて、前記制御状態を前記第1制御状態と前記第2制御状態との間において切り替えるように構成される。
第4側面の制御装置によれば、制御部は、第1パラメータ、第2パラメータ、および、車速の変動に応じて、制御状態を第1制御状態と第2制御状態との間において切り替えできる。
【0009】
本開示の第1から第4側面のいずれか1つに従う第5側面の制御装置において、前記制御部は、前記第1パラメータ、前記第2パラメータ、および、前記クランク軸の回転速度に応じて、前記制御状態を前記第1制御状態と前記第2制御状態との間において切り替えるように構成される。
第5側面の制御装置によれば、第1パラメータ、第2パラメータ、および、クランク軸の回転速度に応じて、制御状態を第1制御状態と第2制御状態との間において切り替えできる。
【0010】
本開示の第1から第5側面のいずれか1つに従う第6側面の制御装置において、前記制御部は、前記第1パラメータ、前記第2パラメータ、および、前記クランク軸に入力される人力駆動力に応じて、前記制御状態を前記第1制御状態と前記第2制御状態との間において切り替えるように構成される。
第6側面の制御装置によれば、第1パラメータ、第2パラメータ、および、クランク軸の回転速度に応じて、制御状態を第1制御状態と第2制御状態との間において切り替えできる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社シマノ
フィッシングシューズ
12日前
株式会社シマノ
スプール及びスピニングリール
12日前
株式会社シマノ
人力駆動車用の検出装置、および、人力駆動車用のドライブユニット
13日前
株式会社シマノ
車両用の電力供給システム、車両用の給電装置、中間装置、および、車両用の給電アセンブリ
12日前
株式会社シマノ
人力駆動車用の制御装置、人力駆動車用の制御システム、および、人力駆動車用の頭部保護装置
7日前
株式会社シマノ
人力駆動車用の制御装置、人力駆動車用のコンポーネント、および、電動コンポーネント用の制御装置
19日前
個人
カート
3か月前
個人
走行装置
4か月前
個人
電動走行車両
4か月前
個人
乗り物
5か月前
個人
発音装置
7か月前
個人
折り畳み自転車
10か月前
個人
閂式ハンドル錠
4か月前
個人
自転車用歩数計
7日前
個人
電動モビリティ
7か月前
個人
駐輪設備
1か月前
個人
自転車用傘捕捉具
11か月前
個人
ボギー・フレーム
2か月前
個人
ルーフ付きトライク
3か月前
個人
ルーフ付きトライク
1か月前
個人
三輪電動車両
7日前
個人
体重掛けリフト台車
11か月前
個人
自由方向乗車自転車
7か月前
個人
“zen-go.”
2か月前
個人
自転車用荷物台
11か月前
個人
キャンピングトライク
9か月前
個人
パワーアシスト自転車
2か月前
個人
アタッチメント
11か月前
個人
ステアリングの操向部材
9か月前
株式会社CPM
駐輪機
12か月前
株式会社三五
リアサブフレーム
10か月前
株式会社豊田自動織機
産業車両
4か月前
個人
フロントフットブレーキ。
4か月前
個人
乗用自動車のディフューザー
27日前
豊田鉄工株式会社
小型車両
3か月前
学校法人千葉工業大学
車両
10か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ