TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025125844
公報種別
公開特許公報(A)
公開日
2025-08-28
出願番号
2024022067
出願日
2024-02-16
発明の名称
自律移動体
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/606 20240101AFI20250821BHJP(制御;調整)
要約
【課題】周囲の物体の検知内容に応じて適切な動作を実行することができる自律移動体を提供する。
【解決手段】自律移動体は、駆動輪、および、車台を有し、直進移動と左右への旋回移動が可能な走行ユニットと、前記走行ユニットの上部に配置され、天板、および、前記走行ユニットを基準に鉛直方向の軸周りに動く首振り動作を行うための首振り機構を有する第2ユニットと、前記走行ユニットの進行方向にある物体を検知する下部物体検知センサと、前記天板の近傍にある物体を検知する上部物体検知センサと、前記下部物体検知センサによる物体の検知結果、および、前記上部物体検知センサによる物体の検知結果に応じて、前記走行ユニット、および、前記第2ユニットの少なくともいずれかを制御する制御部と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
駆動輪、および、車台を有し、直進移動と左右への旋回移動が可能な走行ユニットと、
前記走行ユニットの上部に配置され、天板、および、前記走行ユニットを基準に鉛直方向の軸周りに動く首振り動作を行うための首振り機構を有する第2ユニットと、
前記走行ユニットの進行方向にある物体を検知する下部物体検知センサと、
前記天板の近傍にある物体を検知する上部物体検知センサと、
前記下部物体検知センサによる物体の検知結果、および、前記上部物体検知センサによる物体の検知結果に応じて、前記走行ユニット、および、前記第2ユニットの少なくともいずれかを制御する制御部と、を備える自律移動体。
続きを表示(約 490 文字)
【請求項2】
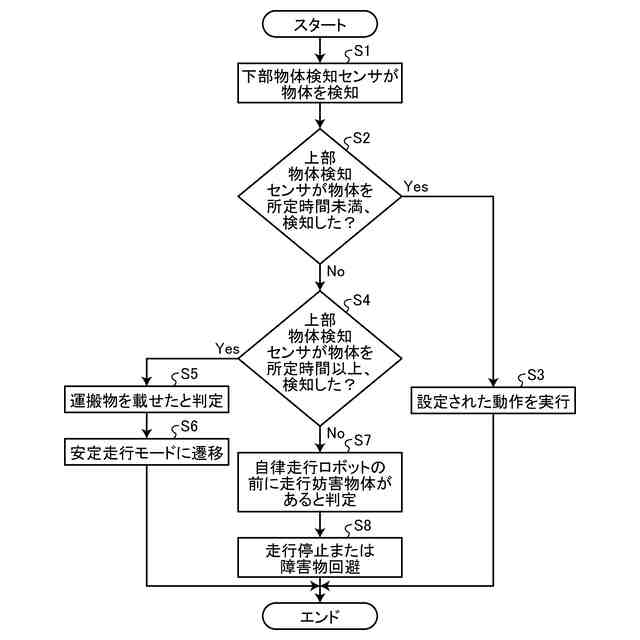
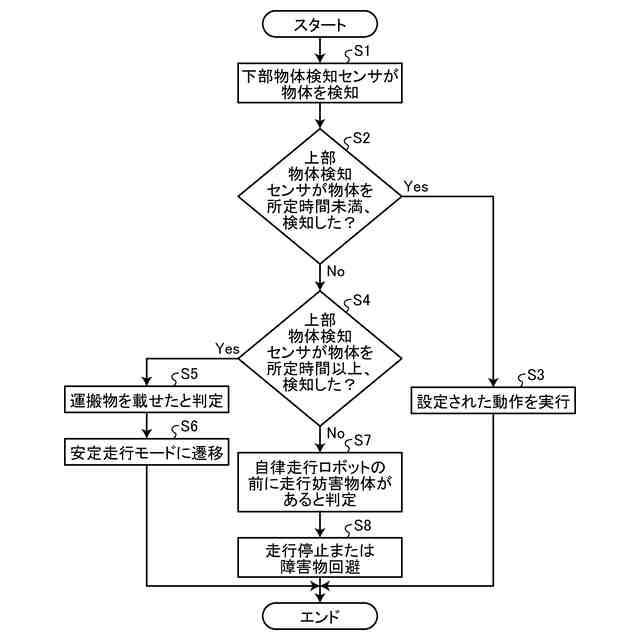
前記制御部は、前記下部物体検知センサが物体を検知し、前記上部物体検知センサが物体を検知し、かつ、前記上部物体検知センサによる物体の検知時間が所定時間未満であった場合、前記走行ユニット、および、前記第2ユニットの少なくともいずれかに対して、設定された動作を実行するように制御する、請求項1に記載の自律移動体。
【請求項3】
前記制御部は、前記下部物体検知センサが物体を検知し、前記上部物体検知センサが物体を検知し、かつ、前記上部物体検知センサによる物体の検知時間が所定時間以上であった場合、前記走行ユニット、および、前記第2ユニットの少なくともいずれかに対して、前記天板に運搬物が載せられることを想定して設定された安定走行モードでの動作を実行するように制御する、請求項1に記載の自律移動体。
【請求項4】
前記制御部は、前記下部物体検知センサが物体を検知し、かつ、前記上部物体検知センサが物体を検知しなかった場合、前記走行ユニットに対して、走行の停止または検知した前記物体の回避を指示する、請求項1に記載の自律移動体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律移動体に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
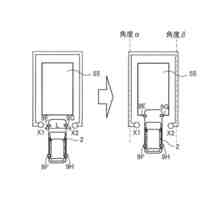
従来から、飲食物や荷物などの物体を運搬可能な自律走行ロボットの研究、開発が行われている。一般に、自律走行ロボットは、周囲の物体を検知する物体検知センサを備え、物体の検知結果に応じて動作を決定する。例えば、自律走行ロボットは、周囲の物体を検知した場合、その物体が人であることを想定し、自身がその人を認識したことを知らせるための認知動作として、首振り動作等を実行する。
【先行技術文献】
【特許文献】
【0003】
特開2022-51979号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
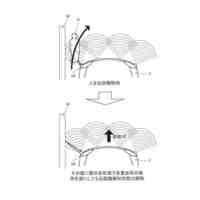
しかしながら、上述の従来技術では、自律走行ロボットが周囲の人を検知した場合に、その人が自律走行ロボットの天板に対して物を載せようとしているのか、あるいは、その人が自律走行ロボットの近くを通過しようとしているだけなのか等の区別がつかない。
【0005】
そのため、例えば、人が自律走行ロボットに近づき、自律走行ロボットの天板に運搬物を載せようとした場合であっても、自律走行ロボットが首振り動作をしてしまうことが考えられる。その場合、首振り動作によって天板が動いていることで人が天板に物を載せにくい、という問題がある。
【0006】
そこで、本発明は、上記事情に鑑みてなされたものであって、周囲の物体の検知内容に応じて適切な動作を実行することができる自律移動体を提供することを課題とする。
【課題を解決するための手段】
【0007】
本発明の自律移動体は、駆動輪、および、車台を有し、直進移動と左右への旋回移動が可能な走行ユニットと、前記走行ユニットの上部に配置され、天板、および、前記走行ユニットを基準に鉛直方向の軸周りに動く首振り動作を行うための首振り機構を有する第2ユニットと、前記走行ユニットの進行方向にある物体を検知する下部物体検知センサと、前記天板の近傍にある物体を検知する上部物体検知センサと、前記下部物体検知センサによる物体の検知結果、および、前記上部物体検知センサによる物体の検知結果に応じて、前記走行ユニット、および、前記第2ユニットの少なくともいずれかを制御する制御部と、を備える。
【発明の効果】
【0008】
本発明によれば、周囲の物体の検知内容に応じて適切な動作を実行することができる自律移動体を提供することができる。
【図面の簡単な説明】
【0009】
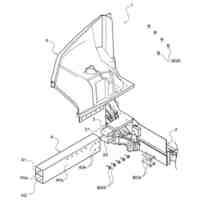
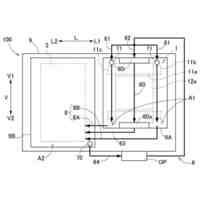
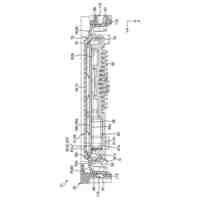
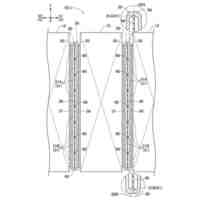
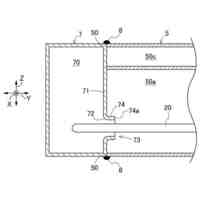
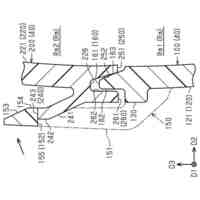
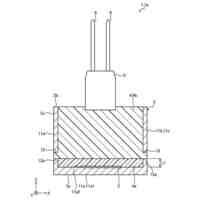
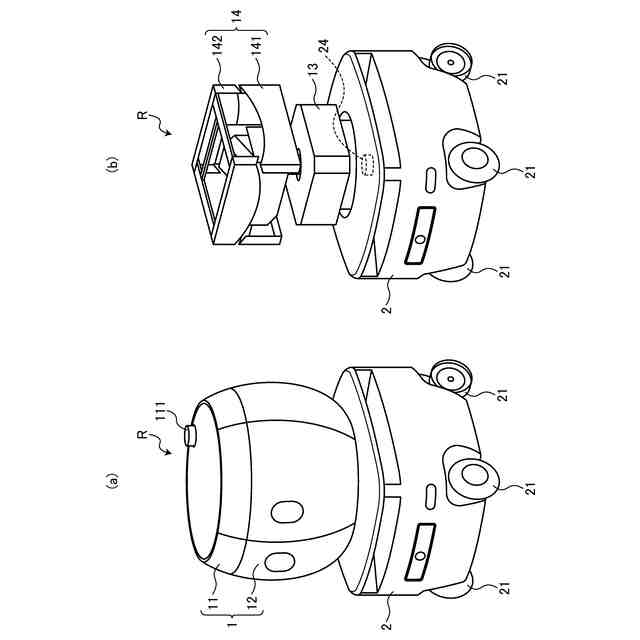
図1は、実施形態の自律走行ロボットの構造を示す図である。
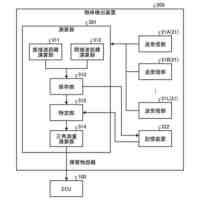
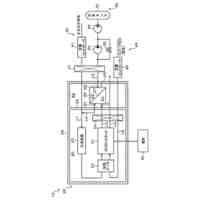
図2は、実施形態の自律走行ロボットの機能構成を示す図である。
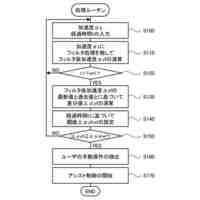
図3は、実施形態の自律走行ロボットによる処理を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、図面を参照して、本実施形態の自律走行ロボット(自律移動体)について説明する。なお、以下の説明において、「前後(方向)」とは、自律走行ロボットの進行方向に平行な方向を示す。また、「左右(方向)」とは、自律走行ロボットの進行方向に垂直な方向であって、地面と平行な方向を示す。また、自律走行ロボットの周囲にある物体のことを、「障害物」と称する場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社アイシン
ロータ
2日前
株式会社アイシン
空気袋
11日前
株式会社アイシン
車体構造
7日前
株式会社アイシン
検知装置
1日前
株式会社アイシン
電子機器
1日前
株式会社アイシン
回転電機
3日前
株式会社アイシン
制御装置
1日前
株式会社アイシン
制御装置
1日前
株式会社アイシン
制御装置
1日前
株式会社アイシン
駆動装置
9日前
株式会社アイシン
制御装置
7日前
株式会社アイシン
回転電機
3日前
株式会社アイシン
駆動装置
1日前
株式会社アイシン
保護装置
1日前
株式会社アイシン
回転電機
7日前
株式会社アイシン
温度調節器
21日前
株式会社アイシン
レーダ装置
1日前
株式会社アイシン
鋳ぐるみ品
11日前
株式会社アイシン
温度調節器
7日前
株式会社アイシン
温度調節器
11日前
株式会社アイシン
温度調節器
21日前
株式会社アイシン
運転支援装置
7日前
株式会社アイシン
物体検出装置
21日前
株式会社アイシン
開閉システム
8日前
株式会社アイシン
センサ固定具
2日前
株式会社アイシン
車両下部構造
1か月前
株式会社アイシン
ポンプケース
14日前
株式会社アイシン
乗員検知装置
22日前
株式会社アイシン
運転支援装置
7日前
株式会社アイシン
駐車支援装置
3日前
株式会社アイシン
駐車支援装置
7日前
株式会社アイシン
車両制御装置
7日前
株式会社アイシン
超音波センサ
2日前
株式会社アイシン
超音波センサ
2日前
株式会社アイシン
電解システム
2日前
株式会社アイシン
運転支援装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ