TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025136665
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024035403
出願日
2024-03-07
発明の名称
物体検出装置
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
G01S
15/42 20060101AFI20250911BHJP(測定;試験)
要約
【課題】物体の位置の検出精度を向上させること。
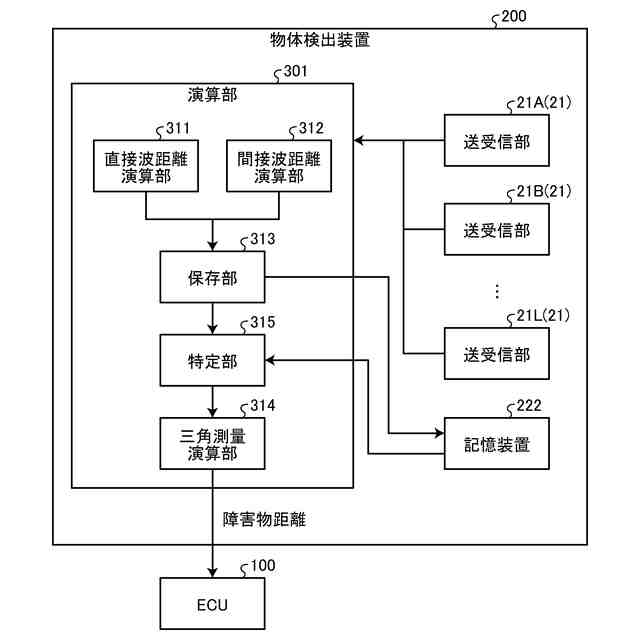
【解決手段】実施形態の物体検出装置は、複数の送受信部のうちのいずれかから送信された送信波に対する一または複数の反射波を受信するごとに、一または複数の反射波に基づく距離を検知データとして記憶部に保存する保存部と、今回の反射波が所定の信頼性を有する場合に、今回の反射波の検知データを基準検知データとし、前回の反射波の受信時点からの移動体の移動情報に基づいて遡り量を算出し、記憶部に保存された複数の検知データの中から、基準検知データと同一物体の検知データを特定する特定部と、送信波を送信するごとに特定される検知データごとに、三角測量により、障害物距離を算出する三角測量演算部と、を備える。
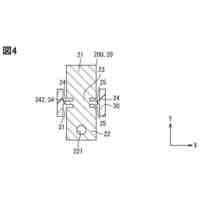
【選択図】図4
特許請求の範囲
【請求項1】
移動体に搭載され、前記移動体の周辺に存在する障害物を検出する物体検出装置であって、
超音波を送受信する複数の送受信部と、
前記複数の送受信部それぞれにおける超音波の送受信のタイミングに基づいて前記移動体から前記障害物までの距離である障害物距離を算出する演算部と、
記憶部と、を備え、
前記演算部は、
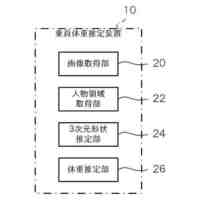
前記複数の送受信部のうちのいずれかから送信された送信波に対する一または複数の反射波を受信するごとに、前記一または複数の反射波に基づく距離を検知データとして前記記憶部に保存する保存部と、
今回の反射波が所定の信頼性を有する場合に、前記今回の反射波の検知データを基準検知データとし、前回の反射波の受信時点からの前記移動体の移動情報に基づいて遡り量を算出し、前記記憶部に保存された複数の検知データの中から、前記基準検知データと前記遡り量を基に同一物体の検知データを特定する特定部と、
前記送信波を送信するごとに特定された検知データごとに、三角測量により、前記障害物距離を算出する三角測量演算部と、
を備える物体検出装置。
続きを表示(約 1,200 文字)
【請求項2】
前記特定部は、前記今回の反射波の受信タイミングから前記遡り量だけ遡ったタイミングで受信した反射波に関する検知データを、前記基準検知データと前記遡り量を基に同一物体の検知データとして特定する、
請求項1に記載の物体検出装置。
【請求項3】
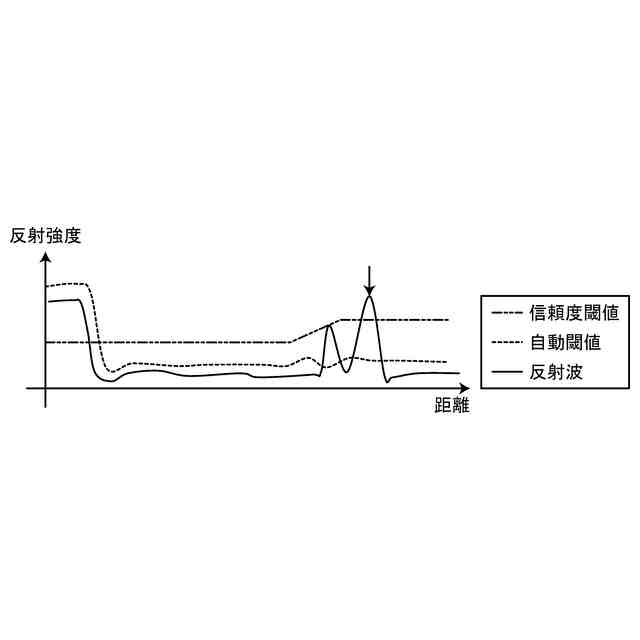
前記特定部は、前記今回の反射波の強度が所定の閾値を超えている場合に、前記今回の反射波が所定の信頼性を有すると判断する、
請求項1に記載の物体検出装置。
【請求項4】
前記所定の閾値は、強度に応じて変動する自動閾値であり、
前記特定部は、前記今回の反射波の強度が前記自動閾値より所定量以上超えている場合に、前記今回の反射波が所定の信頼性を有すると判断する、
請求項3に記載の物体検出装置。
【請求項5】
前記演算部は、
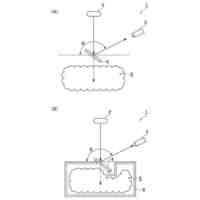
前記複数の送受信部のうちの1つである第1の送受信部から送信された送信波の反射波が前記第1の送受信部により受信され、前記第1の送受信部とは異なる第2の送受信部から送信された送信波の反射波が前記第2の送受信部により受信された場合には、前記第1の送受信部から送信波が送信されたタイミングと当該送信波の反射波が前記第1の送受信部により受信されたタイミングとに基づく第1の直接波距離と、前記第2の送受信部から送信波が送信されたタイミングと当該送信波の反射波が前記第2の送受信部により受信されたタイミングとに基づく第2の直接波距離と、を算出する直接波距離演算部を、さらに備え、
前記三角測量演算部は、前記第1の直接波距離及び前記第2の直接波距離に基づき前記特定された検知データごとに、前記三角測量により前記障害物距離を算出する、
請求項1に記載の物体検出装置。
【請求項6】
前記演算部は、
前記第1の送受信部から送信された送信波の反射波が前記第2の送受信部により受信され、前記第2の送受信部から送信された送信波の反射波が前記第1の送受信部により受信された場合には、前記第1の送受信部から送信波が送信されたタイミングと当該送信波の反射波が前記第2の送受信部により受信されたタイミングとに基づく第1の間接波距離と、前記第2の送受信部から送信波が送信されたタイミングと当該送信波の反射波が前記第1の送受信部により受信されたタイミングとに基づく第2の間接波距離と、を算出する間接波距離演算部、をさらに備え、
前記三角測量演算部は、さらに、前記第1の間接波距離及び前記第2の間接波距離に基づき前記特定された検知データごとに、前記三角測量により前記障害物距離を算出する、
請求項5に記載の物体検出装置。
【請求項7】
前記三角測量演算部は、さらに、前記第1の直接波距離及び前記第2の間接波距離に基づき前記検知データごとに、前記三角測量により前記障害物距離を算出する、
請求項6に記載の物体検出装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、物体検出装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
超音波を利用して車両の周辺に存在する障害物を検出する物体検出装置において、超音波を送受信する送受信部を車体に複数設置し、各送受信部における超音波の送受信のタイミングに基づいて車両から障害物までの距離を算出する技術が利用されている。このような複数の送受信部を備える構成においては、各送受信部が受信する反射波(送受信部から送信された超音波(送信波)が物体に反射されることにより生じる超音波)には、直接波及び間接波が含まれる。
【0003】
直接波とは、ある送受信部から送信された送信波に対応する反射波であって、当該送信波を送信した送受信部と同一の送受信部により受信された反射波である。間接波とは、ある送受信部から送信された送信波に対応する反射波であって、当該送信波を送信した送受信部とは異なる送受信部により受信された反射波である。
【0004】
このような直接波及び間接波を利用する技術として、直接波に基づいて算出した距離と間接波に基づいて算出した距離との組み合わせを用いて、三角測量によって障害物までの距離を推定する技術が知られている。そして、このような三角測量を用いた従来技術として、前回算出した三角測量の位置情報と今回算出した三角測量の位置情報とに基づいて、前回算出した位置情報と今回算出した位置情報が同一物体であるか否かを判定する技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
特開2016-80643号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、このような従来技術では、三角測量は距離が通り程、算出される位置情報の精度が低くなる。このため、従来技術では、前回算出した三角測量の位置情報の精度が低い場合には、今回算出した三角測量の位置情報が前回算出した三角測量の位置情報と同一物体である場合にも拘わらず、別物体であると判断されてしまい、障害物等の物体の検出精度が低下するという問題がある。
【0007】
本発明の実施形態が解決しようとする課題の一つは、物体の位置の検出精度を向上させることができる物体検出装置を提供することである。
【課題を解決するための手段】
【0008】
実施形態の物体検出装置は、移動体に搭載され、前記移動体の周辺に存在する障害物を検出する物体検出装置であって、超音波を送受信する複数の送受信部と、前記複数の送受信部それぞれにおける超音波の送受信のタイミングに基づいて前記移動体から前記障害物までの距離である障害物距離を算出する演算部と、記憶部と、を備え、前記演算部は、前記複数の送受信部のうちのいずれかから送信された送信波に対する一または複数の反射波を受信するごとに、前記一または複数の反射波に基づく距離を検知データとして前記記憶部に保存する保存部と、今回の反射波が所定の信頼性を有する場合に、前記今回の反射波の検知データを基準検知データとし、前回の反射波の受信時点からの前記移動体の移動情報に基づいて遡り量を算出し、前記記憶部に保存された複数の検知データの中から、前記基準検知データと前記遡り量を基に同一物体の検知データを特定する特定部と、前記送信波を送信するごとに特定される検知データごとに、三角測量により、前記障害物距離を算出する三角測量演算部と、を備える。
【発明の効果】
【0009】
実施形態にかかる物体検出装置によれば、一例として、物体の位置の検出精度を向上させることができる。
【図面の簡単な説明】
【0010】
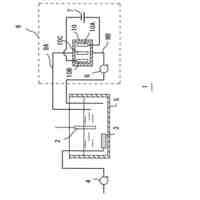
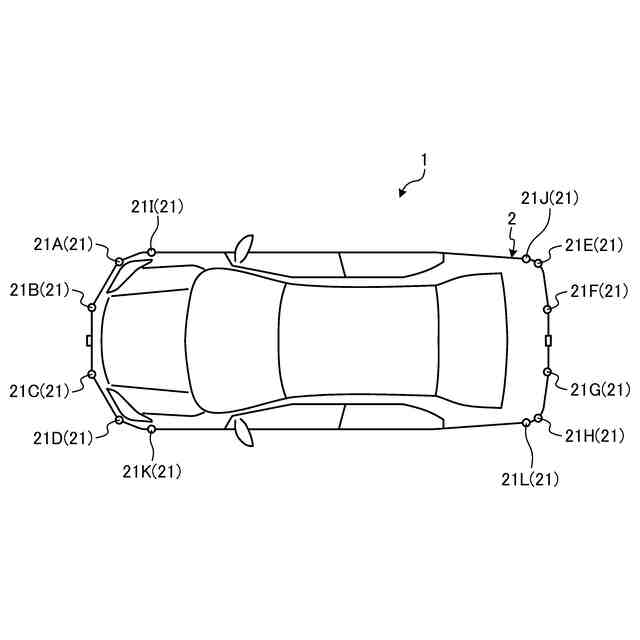
図1は、実施形態に係る車両の構成の一例を示す図である。
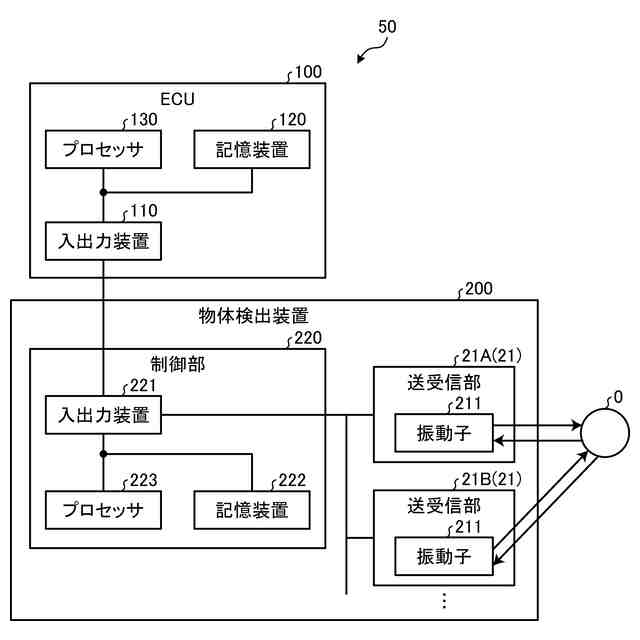
図2は、実施形態に係る車両制御システムの構成の一例を示す図である。
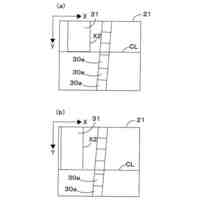
図3は、TOF法による距離の算出方法の一例を示す図である。
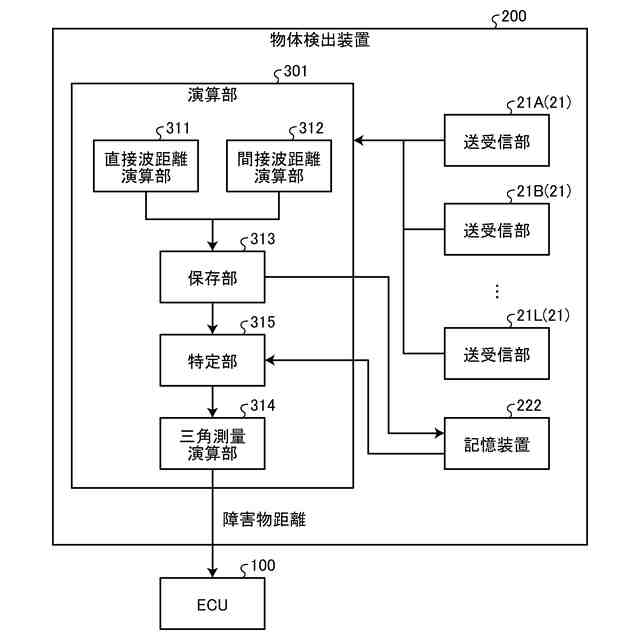
図4は、実施形態に係る物体検出装置の機能構成の一例を示す図である。
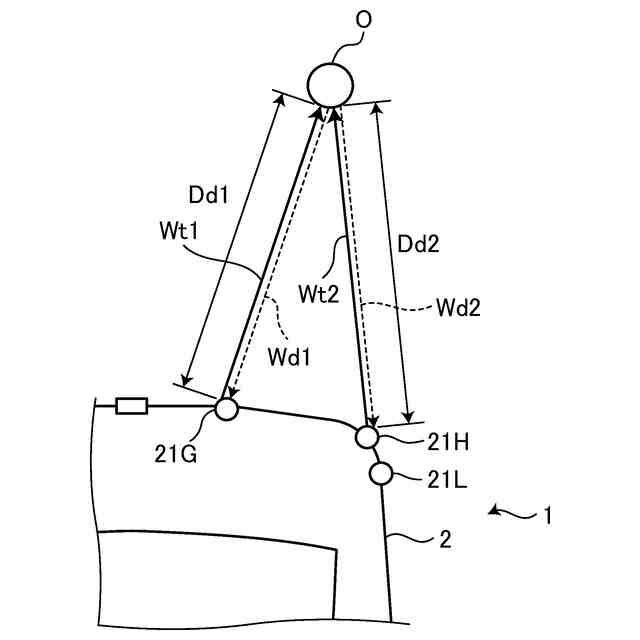
図5は、実施形態に係る第1の直接波距離及び第2の直接波距離の一例を示す図である。
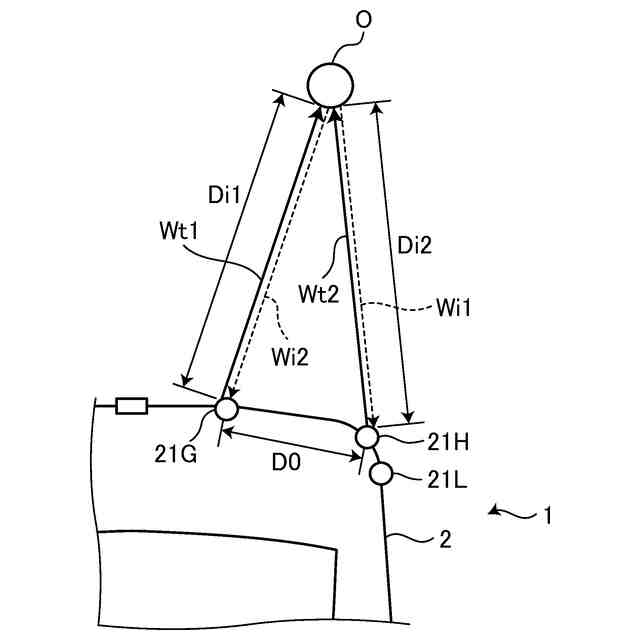
図6は、実施形態に係る第1の間接波距離及び第2の間接波距離の一例を示す図である。
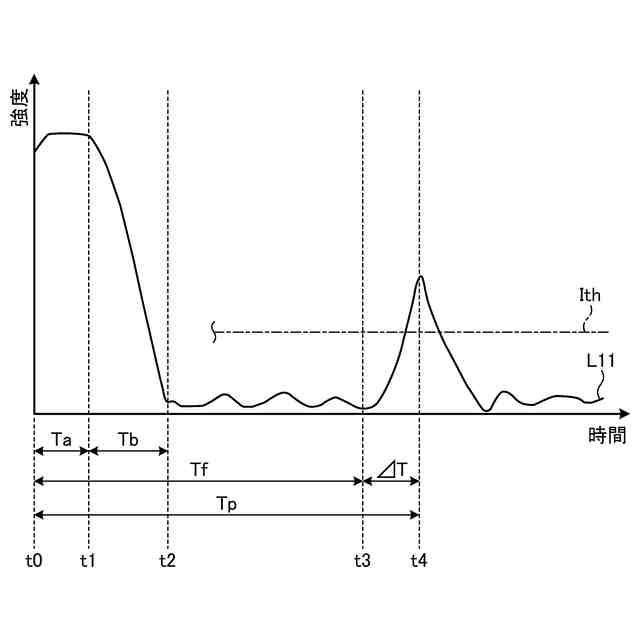
図7は、実施形態に係る反射波の波形の一例を示す図である。
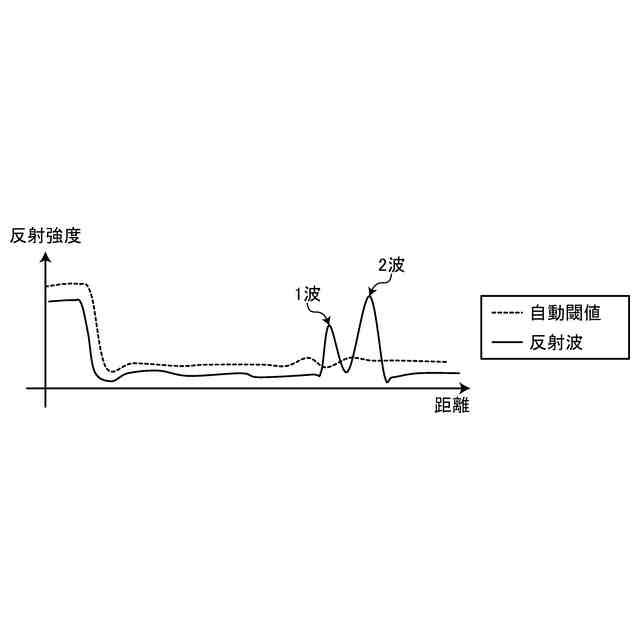
図8は、実施形態に係る送信波に対する複数の反射波の波形の一例を示す図である。
図9は、実施形態に係る検知データの一例を示す図である。
図10は、実施形態に係る車両1の移動と反射波の波形の一例を示す図である。
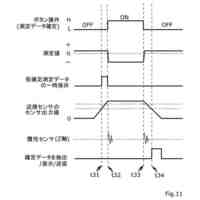
図11は、実施形態に係る物体検出処理の手順の一例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社アイシン
ドアロック装置
17日前
株式会社豊田中央研究所
非接触給電可能な回転電機
17日前
株式会社アイシン
ホール輸送材料およびホール輸送材料を用いた太陽電池
3日前
株式会社アイシン
ホール輸送材料およびホール輸送材料を用いた太陽電池
5日前
株式会社アイシン
ペロブスカイト太陽電池及びペロブスカイト太陽電池の製造方法
9日前
株式会社豊田中央研究所
体重推定装置、体重推定方法、及び体重推定プログラム
18日前
ミクロエース株式会社
被覆銅材の剥離処理方法、処理装置、処理装置制御部およびプログラム
3日前
個人
採尿及び採便具
3日前
個人
高精度同時多点測定装置
18日前
個人
アクセサリー型テスター
19日前
株式会社ミツトヨ
測定器
9日前
アズビル株式会社
電磁流量計
12日前
ダイキン工業株式会社
監視装置
23日前
株式会社ヨコオ
ソケット
24日前
トヨタ自動車株式会社
監視装置
24日前
個人
システム、装置及び実験方法
12日前
大和製衡株式会社
組合せ計量装置
6日前
大和製衡株式会社
組合せ計量装置
6日前
長崎県
形状計測方法
19日前
愛知時計電機株式会社
ガスメータ
9日前
ローム株式会社
半導体装置
17日前
愛知電機株式会社
軸部材の外観検査装置
6日前
ローム株式会社
半導体装置
17日前
TDK株式会社
磁気センサ
24日前
日本特殊陶業株式会社
センサ
9日前
三恵技研工業株式会社
融雪レドーム
24日前
中国電力株式会社
電柱管理システム
23日前
日本特殊陶業株式会社
センサ
23日前
日本特殊陶業株式会社
センサ
23日前
日本特殊陶業株式会社
センサ
23日前
日本特殊陶業株式会社
センサ
23日前
日本特殊陶業株式会社
センサ
23日前
ダイハツ工業株式会社
移動支援装置
24日前
トヨタ自動車株式会社
測定システム
16日前
株式会社デンソー
電流センサ
17日前
多摩川精機株式会社
冗長エンコーダ
24日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ