TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025125750
公報種別
公開特許公報(A)
公開日
2025-08-28
出願番号
2024021884
出願日
2024-02-16
発明の名称
蠕動運動で移動するロボット
出願人
森村金属株式会社
,
公立大学法人大阪
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
5/00 20060101AFI20250821BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】狭い空間を蠕動運動で移動しつつ、目的とする方向へ向かい、高さのある障害物を乗り越えることができるロボットを提供する。
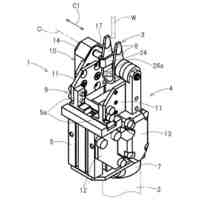
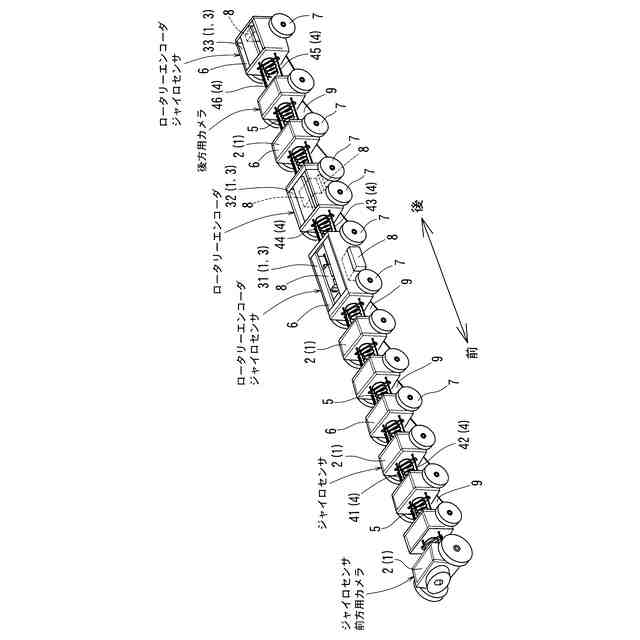
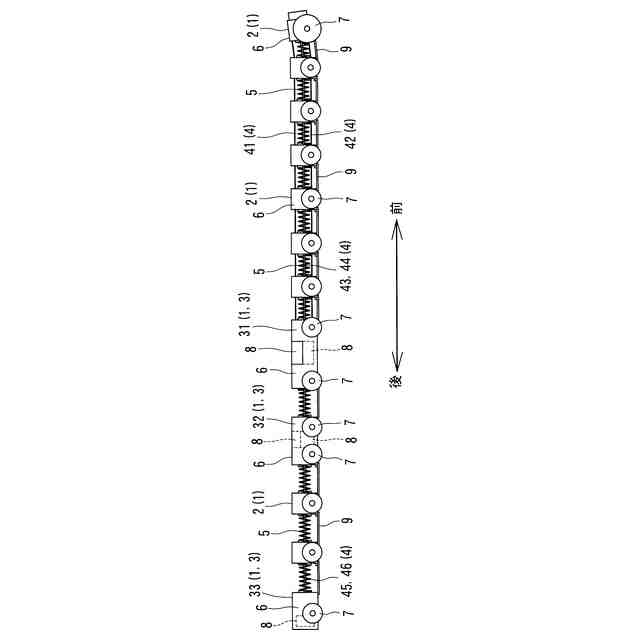
【解決手段】多節体を構成するユニット1として前後に配列された複数個の受動ユニット2と動力ユニット3とを、ワイヤ4とばね5を介して連結する。そして、ワイヤ4を巻き取り、前後に連なるユニット1の間隔を縮小させ、後方のユニット1を前進させてばね5を圧縮し、その反発力により前方のユニット1を前進させる動作の繰り返しにより全体を進行させる移動機能と、ワイヤ4のうち左ワイヤ43と右ワイヤ44の巻取量を別個に制御することにより、進行方向の向きを変える旋回機能と、ワイヤ4のうち上ワイヤ41と下ワイヤ42の巻取量を別個に制御することにより、ユニット1が連結された多節体の前端寄り部分の上下方向の姿勢を変化させる昇降姿勢変換機能とを備えたものとする。
【選択図】図1
特許請求の範囲
【請求項1】
多節体を構成するユニットとして前後に配列された複数個の受動ユニットと動力ユニットがワイヤとばねを介して連結され、
前記ユニットは、それぞれ前記ばねの端部が固定される本体に車輪を備え、前記車輪の車軸に前進方向にのみ回転するワンウェイクラッチを設けた構成とされ、
前記ワイヤには、前記動力ユニットに搭載されたモータにより巻き取られる上ワイヤと下ワイヤ及び左ワイヤと右ワイヤが存在し、
前記ワイヤを巻き取り、前後に連なる前記ユニットの間隔を縮小させ、後方のユニットを前進させて前記ばねを圧縮し、その反発力により前方のユニットを前進させ、この動作を繰り返して全体を進行させる移動機能と、
前記左ワイヤと前記右ワイヤの巻取量を別個に制御することにより、進行方向の向きを変える旋回機能と、
前記上ワイヤと前記下ワイヤの巻取量を別個に制御することにより、前記ユニットが連結された多節体の前端寄り部分の上下方向の姿勢を変化させる昇降姿勢変換機能とを備えている蠕動運動で移動するロボット。
続きを表示(約 550 文字)
【請求項2】
前記多節体の前端側には、前記受動ユニットが連なり、その後方に前記昇降姿勢変換機能及び移動機能を有する動力ユニット、並びに、前記旋回機能及び移動機能を有する動力ユニットが順次連なることを特徴とする請求項1に記載の蠕動運動で移動するロボット。
【請求項3】
前記旋回機能及び移動機能を有する動力ユニットの後方に、前記受動ユニットを挟んで前記移動機能のみを有する動力ユニットが連なることを特徴とする請求項2に記載の蠕動運動で移動するロボット。
【請求項4】
前記多節体において前後に向き合って連なるユニットのうち、前方に位置するユニットの本体の底部には、後方に位置するユニットの本体へ向かう底間部材が設けられていることを特徴とする請求項1に記載の蠕動運動で移動するロボット。
【請求項5】
前記底間部材の素材として、前記多節体において前後に向き合って連なるユニットの重量を比較して、前方に位置するユニットに対し後方に位置するユニットが同等の重さであるか軽い場合には、柔らかい素材を用い、前方に位置するユニットよりも後方に位置するユニットが重い場合には、硬い素材を用いたことを特徴とする請求項4に記載の蠕動運動で移動するロボット。
発明の詳細な説明
【技術分野】
【0001】
この発明は、ミミズのように蠕動運動で移動し、目的とする方向へ向かい、障害物を乗り越える機能を備えたロボットに関するものである。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
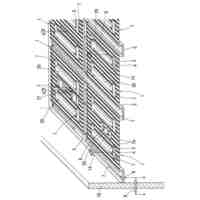
地下駅や地下ショッピング街などの地下空間における天井裏の構造の一例を図18に示す。この例では、地下空間の天壁から垂下する吊ボルト51の下部に野縁受け52,53が縦横に組み合わせて支持され、その下方に野縁54が留め付けられて、野縁54の下面に天井板55の接合部55aが固定されている。
【0003】
このような地下空間の天井では、天井板55やこれを支持する吊ボルト51、野縁受け52,53、野縁54などの下地材が漏水によって腐食するリスクが高く、定期的に天井裏の状態を点検する必要がある。
【0004】
ところが、一般的に天井裏の空間は狭く、各種配線やダクトなどが存在するため、検査員が天井裏の空間に入って直接目視することはできず、天井板55に設けられた点検口から目視できる範囲も限られる。また、点検口からの目視は、高所での作業となるため、危険を伴うという問題もある。
【0005】
その対策として、工業用の内視鏡を使用することも考えられるが、内視鏡を確認が必要な箇所まで送り込むことは困難である。また、小型のドローンを使用することも考えられるが、天井裏のように狭い空間でドローンを飛行させることはできず、クローラで移動するロボットを使用することも考えられるが、このようなロボットは、野縁受け52,53や野縁54のような高さのある障害物を乗り越えることはできない。
【0006】
一方、下記特許文献1には、下水管等の管内検査用ロボットとして、図19(a)乃至(g)に示すような態様の変化を繰り返す蠕動運動で移動するものが記載されている。
【0007】
このロボットは、前後に配列された弾性を有するチューブ状の複数個の把持ユニット61及び推進ユニット62が交互に連結されて、多節体を構成している。把持ユニット61及び推進ユニット62は、圧縮空気が供給されると拡径して前後方向に収縮し、圧縮空気が排出されると縮径して前後方向に伸長するものとされている。そして、把持ユニット61は拡径時に管70に内接し、推進ユニット62は拡径時に前後方向の中間部の複数個所で括れ、把持ユニット61の拡径時の外径よりも小径に抑制されて、管70に内接しないようになっている。
【0008】
このようなロボットは、前端側から後端側へかけて、把持ユニット61及び推進ユニット62の収縮及び伸長動作を伝播させることで、管70の内部を進行することができる。
【先行技術文献】
【特許文献】
【0009】
特開2019-108945号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
上記特許文献1に記載されたような蠕動運動で移動するロボットは、ミミズの動きにヒントを得たものであり、ミミズが人間や動物のように脚で歩行するものや、尺取虫や蛇のように体を上下又は左右にくねらせて移動するものに比べて、最小限の空間で移動できることを利用している。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
森村金属株式会社
蠕動運動で移動するロボット
3か月前
東日本旅客鉄道株式会社
漏水対策を施した天井構造及びその施工方法
5日前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
1か月前
株式会社不二越
ロボット
2か月前
株式会社竹中工務店
補助セット
2か月前
トヨタ自動車株式会社
学習装置
20日前
CKD株式会社
把持装置
5日前
ダイセイ株式会社
ロボット自動刻印装置
5日前
川崎重工業株式会社
ハンド
2か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
トヨタ自動車株式会社
ロボット
2か月前
工機ホールディングス株式会社
作業機
2か月前
瓜生製作株式会社
電動締付工具
13日前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装システム
2か月前
株式会社三共コーポレーション
工具保持具
1か月前
株式会社マキタ
集塵アタッチメント
12日前
トヨタ自動車株式会社
軌道生成装置
2か月前
株式会社不二越
垂直多関節ロボット
20日前
トヨタ自動車株式会社
ロボットハンド
1か月前
アネックスツール株式会社
ドライバービット
2か月前
工機ホールディングス株式会社
作業機
2か月前
川崎重工業株式会社
ワーク搬送ロボット
2か月前
株式会社マキタ
現場用作業機
1か月前
株式会社マキタ
回転打撃工具
2か月前
ワールド技研株式会社
ロボットセル装置
2か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
セイコーエプソン株式会社
ロボット
2か月前
山九株式会社
レンチ保持治具
2か月前
住友重機械工業株式会社
ロボット教示装置
今日
トヨタ自動車株式会社
ロボットの制御装置
2か月前
川崎重工業株式会社
ロボット
2か月前
NTN株式会社
把持装置
5日前
株式会社マキタ
電動工具
20日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ