TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025120752
公報種別
公開特許公報(A)
公開日
2025-08-18
出願番号
2024015823
出願日
2024-02-05
発明の名称
塗装ロボット
出願人
アーベーベー・シュバイツ・アーゲー
,
ABB Schweiz AG
代理人
IAT弁理士法人
主分類
B05B
12/00 20180101AFI20250808BHJP(霧化または噴霧一般;液体または他の流動性材料の表面への適用一般)
要約
【課題】ノズル面を十分に接近させることができない箇所においても塗装品質を保つことができる塗装ロボット10を提供する。
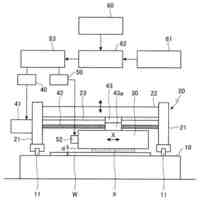
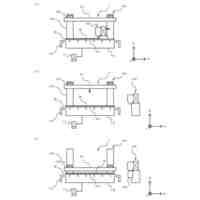
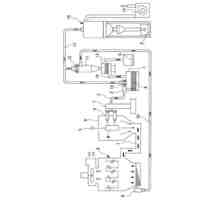
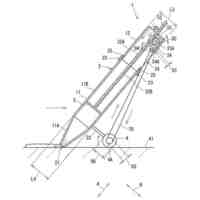
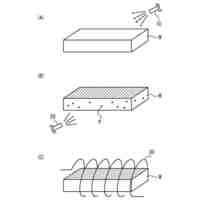
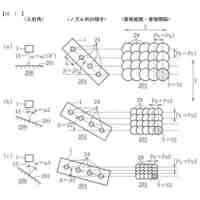
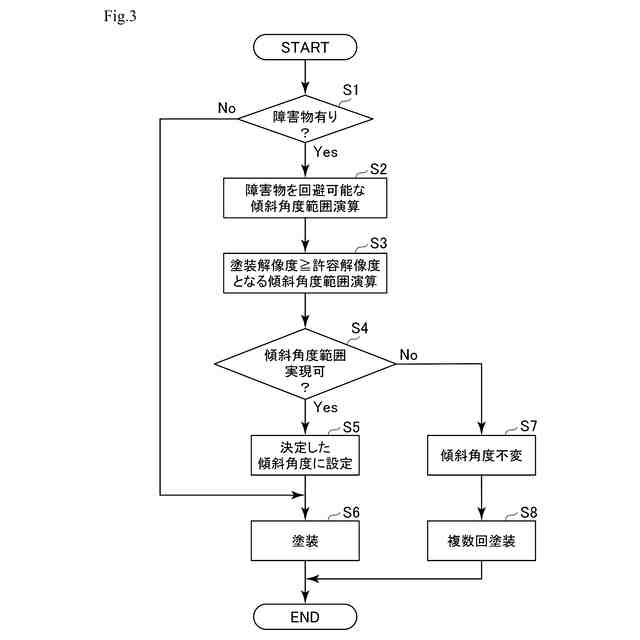
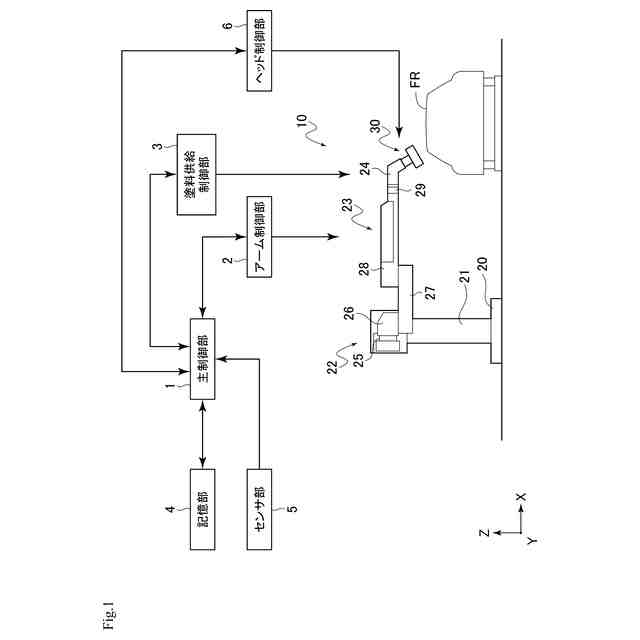
【解決手段】塗料を吐出する複数のノズル32から構成される複数のノズル列33を有し、所定方向に移動しながら被塗物CMを塗装する長尺状の塗装ヘッド30と、塗装ヘッド30を先端に装着すると共に塗装ヘッド30を所望の位置へ移動させるロボットアーム23の作動を制御するアーム制御部2と、塗装ヘッドの傾斜を制御するヘッド制御部6と、を備え、ヘッド制御部6は、塗装ヘッド30の移動方向が塗装ヘッド30の短手方向から長手方向となるまでの間で塗装ヘッド30を傾斜させる傾斜制御を実行する。
【選択図】図3
特許請求の範囲
【請求項1】
塗料を吐出する複数のノズルから構成される複数のノズル列を有し、所定方向に移動しながら被塗物を塗装する長尺状の塗装ヘッドと、
前記塗装ヘッドを先端に装着すると共に前記塗装ヘッドを所望の位置へ移動させるロボットアームの作動を制御するアーム制御部と、
前記塗装ヘッドの傾斜を制御するヘッド制御部と、を備え、
前記ヘッド制御部は、
前記塗装ヘッドの移動方向が前記塗装ヘッドの短手方向から長手方向となるまでの間で前記塗装ヘッドを傾斜させる傾斜制御を実行する、
ことを特徴とする塗装ロボット。
続きを表示(約 810 文字)
【請求項2】
請求項1に記載の塗装ロボットであって、
前記塗装ヘッドの移動中に、前記被塗物の形状に沿って前記塗装ヘッドが追従するように前記傾斜制御が実行される、
ことを特徴とする塗装ロボット。
【請求項3】
請求項1に記載の塗装ロボットであって、
前記ヘッド制御部は、
前記塗装ヘッドの前記ノズル列の配列に基づいて塗装解像度が所定の許容解像度以上となる前記塗装ヘッドの傾斜角度を演算し、その演算結果に基づいて前記塗装ヘッドの前記傾斜制御を実行する、
ことを特徴とする塗装ロボット。
【請求項4】
請求項3に記載の塗装ロボットであって、
前記ヘッド制御部は、
前記塗装解像度が前記許容解像度以上となる前記塗装ヘッドの傾斜角度が存在しないとき、前記被塗物を複数回塗装する、
ことを特徴とする塗装ロボット。
【請求項5】
請求項1に記載の塗装ロボットであって、
前記ヘッド制御部は、
前記塗装ヘッドの移動方向に対して垂直な方向に隣接する、前記ノズル列における各ノズル間の距離が均等になるように前記塗装ヘッドの傾斜角度を演算し、その演算結果に基づいて前記傾斜制御を実行する、
ことを特徴とする塗装ロボット。
【請求項6】
請求項5に記載の塗装ロボットであって、
前記ヘッド制御部は、
前記塗装ヘッドと障害物との干渉を避けるために必要な前記塗装ヘッドの傾斜角度範囲を演算し、前記傾斜角度範囲内で最も前記距離が均等になるように前記塗装ヘッドの前記傾斜角度を演算する、
ことを特徴とする塗装ロボット。
【請求項7】
請求項1に記載の塗装ロボットであって、
前記被塗物は車体である、
ことを特徴とする塗装ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、塗装ロボットに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
自動車等の車両の塗装ラインにおいては、ロボットを用いたロボット塗装が主流となっている。ロボット塗装では、多関節ロボットの先端に、多数のノズル列を有する塗装ヘッドを取り付けた塗装ロボットが用いられる。特許文献1には、自動車等の車両の塗装ラインにおいて、インクジェット方式の塗装ヘッドを有する塗装ロボットを用いて塗装を行うことが開示されている。塗装ロボットによる塗装時には、塗装ヘッドの進行方向が長手方向に対して垂直に保たれた状態で塗装することが好ましい。
【先行技術文献】
【特許文献】
【0003】
国際公開第2021/205537号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
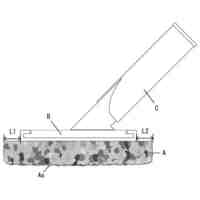
しかし、塗装ヘッドの長手方向が塗装方向に対して垂直である場合、塗装ヘッドを移動させて塗装中、特に障害物が近接する部位などでは、塗装ヘッドと障害物との干渉を避けるため、塗装ヘッドのノズル面を被塗物に十分接近させることができない。これにより、当該部位は塗装ヘッドからの塗装距離が離れるため、塗装の解像度が低下して所望の塗装品質を得られなくなる可能性がある。
【0005】
本発明は上記の事情に鑑みなされたもので、被塗物に対してノズル面を十分に接近させることができない箇所において塗装品質を保つことができる塗装ロボットを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一側面の塗装ロボットは、塗料を吐出する複数のノズルから構成される複数のノズル列を有し、所定方向に移動しながら被塗物を塗装する長尺状の塗装ヘッドと、塗装ヘッドを先端に装着すると共に塗装ヘッドを所望の位置へ移動させるロボットアームの作動を制御するアーム制御部と、塗装ヘッドの傾斜を制御するヘッド制御部と、を備え、ヘッド制御部は、塗装ヘッドの移動方向が塗装ヘッドの短手方向から長手方向となるまでの間で塗装ヘッドを傾斜させる傾斜制御を実行する。
【0007】
また、上述の発明において、塗装ヘッドの移動中に、被塗物の形状に沿って塗装ヘッドが追従するように傾斜制御が実行される、ことが好ましい。
【0008】
また、上述の発明において、ヘッド制御部は、塗装ヘッドのノズル列の配列に基づいて塗装解像度が所定の許容解像度以上となる塗装ヘッドの傾斜角度を演算し、その演算結果に基づいて塗装ヘッドの傾斜制御を実行する、ことが好ましい。
【0009】
また、上述の発明において、ヘッド制御部は、塗装解像度が許容解像度以上となる塗装ヘッドの傾斜角度が存在しないとき、被塗物を複数回塗装する、ことが好ましい。
【0010】
また、上述の発明において、ヘッド制御部は、塗装ヘッドの移動方向に対して垂直な方向に隣接する、ノズル列における各ノズル間の距離が均等になるように塗装ヘッドの傾斜角度を演算し、その演算結果に基づいて傾斜制御を実行する、ことが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ベック株式会社
被膜形成方法
4か月前
ベック株式会社
被膜形成方法
2か月前
ベック株式会社
被膜形成方法
2か月前
菊水化学工業株式会社
塗装方法
5か月前
中外炉工業株式会社
塗布装置
5か月前
株式会社吉野工業所
キャップ
2か月前
ベック株式会社
装飾被膜の形成方法
5か月前
ベック株式会社
装飾被膜の形成方法
1か月前
プルガティオ株式会社
噴霧装置
2か月前
プルガティオ株式会社
噴霧装置
2か月前
プルガティオ株式会社
噴霧装置
2か月前
東レエンジニアリング株式会社
塗布装置
4か月前
ヒット工業株式会社
マスキング具
24日前
富士合成株式会社
スラッジ回収構造
5か月前
中外炉工業株式会社
塗工装置
1か月前
兵神装備株式会社
塗布検査システム
5か月前
株式会社吉野工業所
ポンプ式吐出器
2か月前
株式会社吉野工業所
トリガー式吐出器
5か月前
株式会社吉野工業所
吐出器
2か月前
旭サナック株式会社
粉体塗装装置
今日
株式会社マキタ
グリース吐出装置
4か月前
株式会社吉野工業所
吐出器
2か月前
株式会社大関
塗装用ローラとその製造方法
2か月前
AWJ株式会社
ステンシルプレートセット
25日前
三菱鉛筆株式会社
多液混合型塗布具
1か月前
積水ハウス株式会社
接着剤塗布装置
1か月前
トヨタ自動車東日本株式会社
塗料調色方法
5か月前
ヤマホ工業株式会社
液体散布杆
3か月前
Mipox株式会社
塗装物の製造方法
3日前
個人
ホースやノズルの長尺部の挟持具
5か月前
株式会社吉野工業所
液体噴出器
5か月前
株式会社吉野工業所
ノズル部材
2か月前
株式会社吉野工業所
吐出器
26日前
株式会社吉野工業所
吐出器
26日前
株式会社リコー
液滴吐出装置及び液滴吐出方法
5か月前
有限会社橋本漆芸
ガラス瓶の漆調塗装及び加飾
6日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ