TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025118499
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2024185177
出願日
2024-10-21
発明の名称
運動軸線を自己適応させる足関節の運動ロボットとその制御方法
出願人
個人
代理人
TRY国際弁理士法人
主分類
B25J
11/00 20060101AFI20250805BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】運動軸線を自己適応させる足関節の運動ロボット及びその制御方法を提供する。
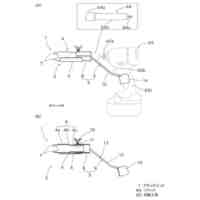
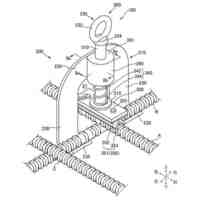
【解決手段】運動ロボットは、軸線補償手段、ロープ巻出・巻取手段、滑車偏向手段、支持手段、定滑車及びロープを含み、軸線補償手段、ロープ巻出・巻取手段、滑車偏向手段、定滑車和ロープは、いずれも、支持手段に設置され、ロープ巻出・巻取手段、滑車偏向手段及び定滑車は、共に、軸線補償手段の両側に対称的に設置される。本発明では、両アーム機構とばねにより、足関節の運動軸線とロボットの運動軸向をあてはめるように実現し、運動過程において損害が発生してしまうことを避けることができ、ロープ巻出・巻取手段により、モーターの転回角度に基づいてロープの伸縮を正確で制御するように実現し、滑車偏向手段によりロープと滑車との摩擦を抑制、ロープ方向の変更がなりやすく、各手段を互いに組み合わせることにより足関節の各種の運動を実現することができる。
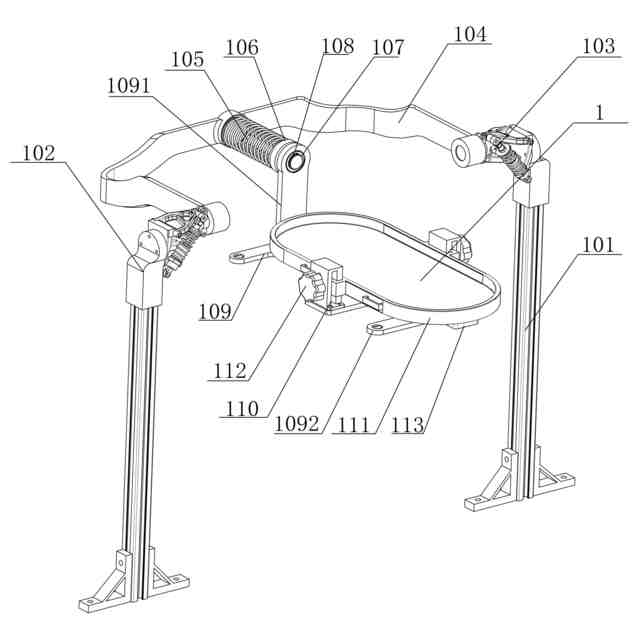
【選択図】図1
特許請求の範囲
【請求項1】
軸線補償手段、ロープ巻出・巻取手段、滑車偏向手段、支持手段及びロープを含み、
軸線補償手段は、支柱、固定部、両アーム機構、転回フレーム、ばね、踏み板接続フレーム、踏み板スライドレール、踏み板、つまみ及び姿勢センサーを含み、支柱が支持手段内に対称的に設置され、支柱における第一端面が支持手段の底板に接続され、固定部が支柱における第二端面に接続され、転回フレームが両側に、共に両アーム機構を介して固定部に転回するように接続され、ばねは、第一端が転回フレームに固定するように接続される一方、第二端が踏み板接続フレームの支持アームに転回するように接続され、踏み板接続フレームにおける支持板は、両側において踏み板スライドレールに対称的に設置され、踏み板が踏み板スライドレールに摺動するように接続され、つまみが踏み板スライドレールを貫通して踏み板にネジ接続され、姿勢センサーが踏み板に接続されており、
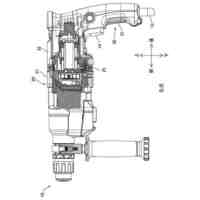
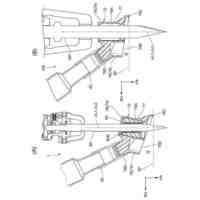
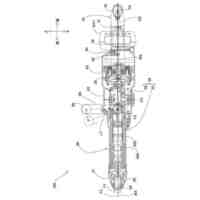
ロープ巻出・巻取手段は、底板に設置され、ロープ巻出・巻取手段は、モーター、巻き胴軸、巻き胴、第一ギア、ギアフレーム、第二ギア、ギア軸、第三ギア、カム部、第四ギア、案内棒及び同期ブロックを含み、巻き胴軸の第一回転軸が継手を介してモーターの出力軸に接続され、巻き胴が巻き胴軸の案内軸に摺動するように接続され、巻き胴軸の第二回転軸が軸受座を介して底板に転回するように接続され、第一ギアが巻き胴軸の第一回転軸に接続され、ギアフレームが巻き胴の一方側の位置に設置され、第二ギアがギア軸を介してギアフレームに転回するように接続され共に、第二ギアが第一ギアにかみ合うように転動し、第三ギアがギア軸に接続され、カム部のカム軸がギアフレームに転回するように接続され、第四ギアがカム軸に接続されると共に第四ギアが第三ギアにかみ合うように転動し、案内棒がカム部の一方側の位置に設置されると共に案内棒の両端がギアフレームに接続され、同期ブロックのスライドブロックが案内棒に摺動するように接続され、同期ブロックの柱状案内ブロックがカム部のカム溝に摺動するように接続され、同期ブロックの駆動ブロックが巻き胴に摺動するように接続されており、
滑車偏向手段は、支持座、軸受ブロック、揺動部、揺動滑車、ラック、引きばね座及び引きばねを含み、軸受ブロックが支持座の第一端面に接続され、揺動部が軸受ブロックに転回するように接続され、揺動部が支持座の摺動溝が摺動するように接続、揺動滑車は、揺動部の中央位置に設置され、ラックがラック座を介して支持座に設置されると共に、ラックがラック座に摺動するように接続され、ラックが揺動部にかみ合うように転動され、引きばねの第一端が引きばね座を介してラックに接続され、引きばねの第二端がラック座に接続される、ことを特徴とする運動軸線を自己適応させる足関節の運動ロボット。
続きを表示(約 2,800 文字)
【請求項2】
支持手段は、底板、フレームワーク、上面板、腿部フレーム、腿部装具及びユニバーサルホイールを含み、フレームワークの第一端面が底板の第一端面に接続され、上面板の第一端面がフレームワークの第二端面に接続され、腿部フレームが上面板の第二端面に接続され、腿部装具が腿部フレームに接続され、ユニバーサルホイールが底板の第二端面の四つの隅部に設置される、ことを特徴とする請求項1に記載の運動軸線を自己適応させる足関節の運動ロボット。
【請求項3】
両アーム機構は、アーム支持座、第一アーム、第二アーム、移動座及びダンパーを含み、アーム支持座が固定部に接続され、第一アームと第二アームとの第一端が共に、アーム支持座に転回するように接続され、第一アームと第二アームとの第二端が共に、移動座に転回するように接続され、第一アームと第二アームとが平行するように設置され、ダンパーの第一端がアーム支持座に転回するように接続、ダンパーの第二端が移動座に転回するように接続される、ことを特徴とする請求項1に記載の運動軸線を自己適応させる足関節の運動ロボット。
【請求項4】
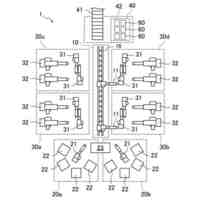
滑車偏向手段、ロープ巻出・巻取手段及びロープは、それらの数が同じであり、底板における四つの隅部は、それぞれ、四つのロープ巻出・巻取手段が設置され、少なくとも二つのロープ巻出・巻取手段が底板に対称的に斜めで設置され、滑車偏向手段は、上面板に少なくとも四つだけ設置され、少なくとも二つだけの滑車偏向手段が底板に対称的に設置され、底板における四つの隅部に定滑車がさらに設置されており、少なくとも四つのロープの第一端が四つの隅部に位置するロープ巻出・巻取手段の巻き胴と巻かれ、四つのロープの第二端が順に定滑車を巻き回してから、上面板に位置する滑車偏向手段の揺動滑車及び踏み板接続フレームの支持板に接続され、少なくとも二つだけのロープの第一端が、斜めで設置されているロープ巻出・巻取手段の巻き胴と巻かれ、二つのロープの第二端が底板に設置されている滑車偏向手段の揺動滑車を巻き回してから踏み板接続フレームの支持板に接続される、ことを特徴とする請求項1に記載の運動軸線を自己適応させる足関節の運動ロボット。
【請求項5】
巻き胴軸は、回転盤、案内軸、第一回転軸及び第二回転軸を含み、案内軸は、円周に回って二つの回転盤間に分布し、第一回転軸と第二回転軸とが共に回転盤に接続され、回転盤、案内軸、第一回転軸及び第二回転軸は、それらの軸線が共に同じである、ことを特徴とする請求項1に記載の運動軸線を自己適応させる足関節の運動ロボット。
【請求項6】
カム部は、カム、カム溝及びカム軸を含み、カム溝は、カムに回って設置され、カム軸がカムの両端に設置される、ことを特徴とする請求項1に記載の運動軸線を自己適応させる足関節の運動ロボット。
【請求項7】
同期ブロックは、スライドブロック、柱状案内ブロック及び駆動ブロックを含み、柱状案内ブロックがスライドブロックの第一端面に設置されると共に、カム部におけるカム溝との接触端が半球形とされ、駆動ブロックがスライドブロックの第二端面に設置され、巻き胴における一方側の位置が円弧状凹溝に設置され、駆動ブロックが円弧状凹溝に摺動するように接続される、ことを特徴とする請求項5に記載の運動軸線を自己適応させる足関節の運動ロボット。
【請求項8】
揺動部は、揺動ブロック、第五ギア及び転回軸を含み、揺動ブロックが支持座の摺動溝に摺動するように接続され、第五ギアが揺動ブロックの一方側の位置に設置されると共に第五ギアがラックにかみ合うように転動され、転回軸が揺動ブロックにおける第二端面の中央位置に設置され、転回軸が軸受ブロックに転回するように接続され、転回軸の軸線と揺動滑車の滑車とは、接線が重なり合う、ことを特徴とする請求項1に記載の運動軸線を自己適応させる足関節の運動ロボット。
【請求項9】
踏み板接続フレームは、支持アームと支持板を含み、支持アームと支持板が垂直的に設置され、支持アームは、末端に貫通穴が設置され軸線補償手段の軸受に接続され、支持板における四つの隅部に溝穴が設けられ、ロープは、溝穴を介して支持板に接続され、転回フレームは、両側の末端位置に空心柱体が対称的に設置され、移動座にソリッド柱体が設置され、空心柱体の内側がソリッド柱体に転回しながら摺動するように接続される、ことを特徴とする請求項1に記載の運動軸線を自己適応させる足関節の運動ロボット。
【請求項10】
請求項1~9のいずれか一項に記載の運動軸線を自己適応させる足関節の運動ロボットの制御方法であって、
足部を踏み板に置き、包帯により踏み板に固定、つまみにより踏み板と転回フレームとの距離を調節し、足関節の軸線と転回フレームの転回軸線とが重なり合うようにして、腿部をバンドリングにより腿部装具と共に固定するステップS1と、
全体座標系と局所座標系とをそれぞれ作成し、両側の支柱の底部における接続線の中心点を原点Oとして全体座標系OXbYbZbを作成し、踏み板の半円の円心を座標原点Qとして局所座標系QXaYaZaを作成し、転回フレームの転回軸線と軸受の軸線との交差点を座標原点Pとして局所座標系PXYZを作成し、AiがロープLiと運動プラットフォームとの接続点であり、BiがロープLiと揺動滑車との接続点であり、そのうち、i=1、2、3、4、5、6である、ステップS2と、
局所座標系、及び、踏み板につき、X軸に対する回転角度α、Y軸に対する回転角度β、Z軸に対する回転角度γに基づいて、ZYXオイラー角により踏み板の姿勢を表現すると、局所座標系PXYZに対する局所座標系QXaYaZaの回転行列がPRQになるステップS3と、
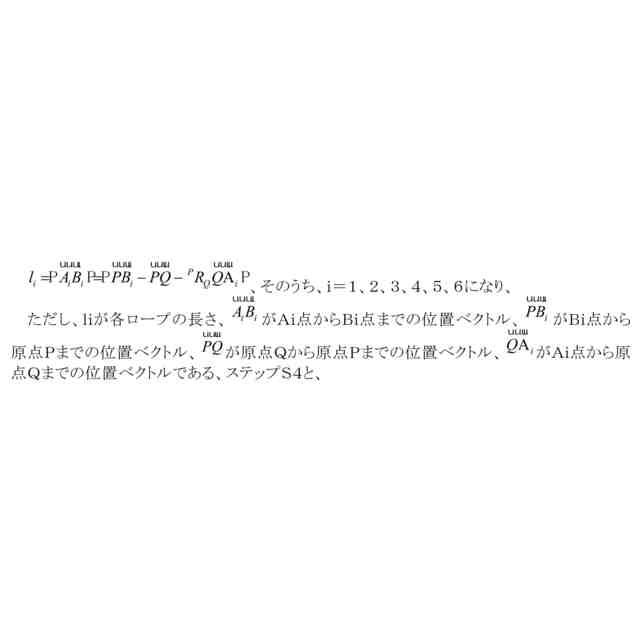
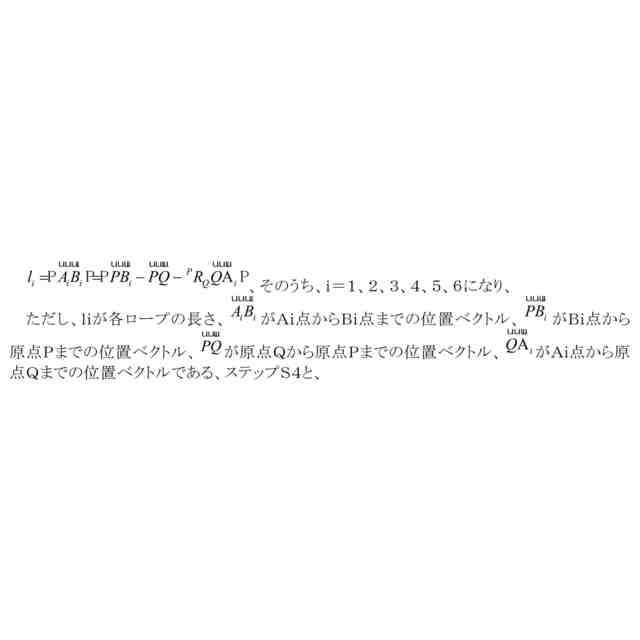
幾何特性及びベクトル平行四角形に従って、各ロープの長さliをロープ接続点と座標点との間の関係により表現すると、具体的な表現式が
JPEG
2025118499000004.jpg
33
170
各パラメーター点をロープ長さliの表現式に代入すると、各ロープの長さと踏み板転回角度との間の具体的な関係値を取得するステップS5と、
踏み板が転回することに必要な角度に基づいて、計算により各モーターの転回角度を取得し、コントローラーにより、各モーターの転回角度を制御し、各ロープの伸縮を実現することにより、軸線に対する踏み板の転回を実現し、姿勢センサーにより踏み板の姿態データをリアルタイムで検知してコントローラーにフィードバックすることにより各モーターの伸縮量をリアルタイムで調整するステップS6と、を含む、ことを特徴とする運動軸線を自己適応させる足関節の運動ロボットの制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、運動ロボットの技術分野に関し、特に、運動軸線を自己適応させる足関節の運動ロボット及びその制御方法に関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
足関節が運動をしている過程に損傷が発生してしまうということを避けるために、現在、数多くの足関節の運動ロボットが、固定される転回軸線に基づいて研究されている。生体の回転中心とロボットの回転中心とが合致するように実現することが難しい。足関節が運動をしている過程に、運動軸線が常に変化しているので、簡単な剛性等の効果により、人体運動軸線との重なり合いを実現することが難しい。また、剛性機構は、慣性による衝突が大きく、従順性が弱く、運動や訓練をしている過程に、剛性接続棒が、有害な衝突を生じやすい。
【0003】
中国特許出願であるCN201210555816.1は、下腿運動訓練に用いられる外骨格ロボット及びその運動制御方法を開示しており、ロボットは、支持バランスフレーム、外骨格機械腿、トレッドミル及び制御システムを含み、運動制御方法は、被動歩行運動モードと主動歩行運動モードをそれぞれ提供し、被動歩行運動モードでは、制御ロボットにより、操作者が特定の運動を完了し又は正確な生理学歩行姿態の軌跡に従って運動するように連動しており、主動歩行運動モードでは、間接的に修正が終わり、又は、自己適応コントローラーにより、操作者に望ましい歩行訓練軌跡が発生するまで、ロボットにより操作者に限った異常運動を抑制し、ロボットにより歩行運動に補助力や抵抗力をかけるという目的を間接的に実現する。しかしながら、同出願は、運動をしている過程に足関節に現れる変化に完全的に備えることができず、ロボットの運動軸線と生体運動軸線との重なり合いを完全に実現することができない。
【発明の概要】
【発明が解決しようとする課題】
【0004】
故に、軸線を自動的に補償し、軸線を運動過程における変化に自己適応させる、運動軸線を自己適応させる足関節の運動ロボット及びその制御方法を提供することが必要になる。
【課題を解決するための手段】
【0005】
従来技術に存在している問題に対しては、本発明が運動軸線を自己適応させる足関節の運動ロボット及びその制御方法を提供しており、両アーム機構とばねにより、足関節の運動軸線とロボットの運動軸向をあてはめるように実現し、運動をしている過程に損傷が発生してしまうということを避け、ロープ巻出・巻取手段により、モーターの転回角度に従ってロープの伸縮を正確に制御し、滑車偏向手段によりロープと滑車との摩擦を抑制し、ロープの方向を変えることが一層易くなり、各手段を互いに組み合わせることにより、足関節における背屈・底屈、内反・外反、内外旋を実現して、足関節の運動や訓練ができる。
【0006】
本発明は、軸線補償手段、ロープ巻出・巻取手段、滑車偏向手段、支持手段及びロープを含み、軸線補償手段は、支柱、固定部、両アーム機構、転回フレーム、ばね、踏み板接続フレーム、踏み板スライドレール、踏み板、つまみ及び姿勢センサーを含み、支柱が支持手段内に対称的に設置され、支柱の第一端面が支持手段の底板に接続され、固定部が支柱の第二端面に接続され、転回フレームは、両側に、共に、両アーム機構を介して、固定部に転回するように接続され、ばねの第一端が転回フレームに固定するように接続され、ばねの第二端が踏み板接続フレームの支持アームに転回するように接続され、踏み板接続フレームの支持板は、両側に、踏み板スライドレールが対称的に設置され、踏み板が踏み板スライドレールに摺動するように接続、つまみ、踏み板スライドレールを貫通して踏み板にネジ接続され、姿勢センサーが踏み板に接続され、ロープ巻出・巻取手段が底板に設置され、ロープ巻出・巻取手段は、モーター、巻き胴軸、巻き胴、第一ギア、ギアフレーム、第二ギア、ギア軸、第三ギア、カム部、第四ギア、案内棒及び同期ブロックを含み、巻き胴軸の第一回転軸が継手を介して、モーターの出力軸に接続され、巻き胴が巻き胴軸の案内軸に摺動するように接続され、巻き胴軸の第二回転軸が軸受座を介して底板に転回するように接続、第一ギアが巻き胴軸の第一回転軸に接続され、ギアフレームが巻き胴の一方側の位置に設置され、第二ギアがギア軸を介して、ギアフレームに転回するように接続されると共に、第二ギアが第一ギアにかみ合うように転動され、第三ギアがギア軸に接続され、カム部のカム軸がギアフレームに転回するように接続され、第四ギアがカム軸に接続されると共に第四ギアが第三ギアにかみ合うように転動され、案内棒がカム部の一方側の位置に設置され、案内棒の両端がギアフレームに接続され、同期ブロックのスライドブロックが案内棒に摺動するように接続され、同期ブロックの柱状案内ブロックがカム部のカム溝に摺動するように接続され、同期ブロックの駆動ブロックが巻き胴に摺動するように接続され、滑車偏向手段は、支持座、軸受ブロック、揺動部、揺動滑車、ラック、引きばね座及び引きばねを含み、軸受ブロックが支持座の第一端面に接続され、揺動部が軸受ブロックに転回するように接続され、揺動部が支持座の摺動溝に摺動するように接続され、揺動滑車が揺動部の中央位置に設置され、ラックがラック座を介して、支持座に設置されると共にラックがラック座に摺動するように接続され、ラックが揺動部にかみ合うように転動され、引きばねの第一端が引きばね座を介して、ラックに接続され、引きばねの第二端がラック座に接続される、運動軸線を自己適応させる足関節の運動ロボットを提供する。
【0007】
好ましくは、支持手段は、底板、フレームワーク、上面板、腿部フレーム、腿部装具及びユニバーサルホイールを含み、フレームワークの第一端面が底板の第一端面に接続され、上面板の第一端面がフレームワークの第二端面に接続され、腿部フレームが上面板の第二端面に接続され、腿部装具が腿部フレームに接続され、ユニバーサルホイールが底板における第二端面四つの隅部に設置される。
【0008】
好ましくは、両アーム機構は、アーム支持座、第一アーム、第二アーム、移動座及びダンパーを含み、アーム支持座が固定部に接続され、第一アームと第二アームとの第一端が共にアーム支持座に転回するように接続され、第一アームと第二アームとの第二端が共に移動座に転回するように接続され、第一アームと第二アームとが平行するように設置され、ダンパーの第一端がアーム支持座に転回するように接続され、ダンパーの第二端が移動座に転回するように接続される。
【0009】
好ましくは、滑車偏向手段、ロープ巻出・巻取手段及びロープは、それらの数が同じであり、底板における四つの隅部にそれぞれ四つのロープ巻出・巻取手段が設置され、少なくとも二つだけのロープ巻出・巻取手段が対称的に底板に斜め設置され、滑車偏向手段は、上面板に少なくとも四つだけ設置され、少なくとも二つの滑車偏向手段が底板に対称的に設置され、底板における四つの隅部に定滑車がさらに設置されており、少なくとも四つのロープの第一端が四つの隅部に位置するロープ巻出・巻取手段の巻き胴と巻かれ、四つのロープの第二端が順に定滑車を巻き回して上面板に位置する滑車偏向手段の揺動滑車と踏み板接続フレームの支持板に接続され、少なくとも二つのロープの第一端が、斜め手設置されているロープ巻出・巻取手段の巻き胴と巻かれ、二つのロープの第二端が底板に設置されている滑車偏向手段の揺動滑車と踏み板接続フレームの支持板に接続される。
【0010】
好ましくは、巻き胴軸は、回転盤、案内軸、第一回転軸及び第二回転軸を含み、案内軸は、円周に回って二つの回転盤間に分布し、第一回転軸と第二回転軸とが共に回転盤に接続され、回転盤、案内軸、第一回転軸及び第二回転軸は、それらの軸線が共に同じである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
5日前
株式会社ジャノメ
ロボット
1か月前
住友重機械工業株式会社
教示装置
1か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
株式会社ダイヘン
搬送装置
1か月前
日本精工株式会社
締結用工具
2日前
川崎重工業株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
ARMA株式会社
ジョイントフレーム
今日
トヨタ自動車株式会社
カプラ接続治具
9日前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
積水ハウス株式会社
フィルム除去具
21日前
株式会社マキタ
電気機器
1か月前
ホシデン株式会社
分解用治具
1か月前
株式会社不二越
協働ロボットシステム
26日前
工機ホールディングス株式会社
作業機
1か月前
ダイハツ工業株式会社
移載治具
今日
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社リコー
多関節ロボット
1か月前
株式会社清水製作所
電動工具の吊下げ具
1か月前
株式会社不二越
ロボットシステム
15日前
SMC株式会社
ベルヌーイグリッパ
1か月前
セイコーエプソン株式会社
ロボット
5日前
コネクテッドロボティクス株式会社
保持システム
23日前
タイガー産業株式会社
アタッチメント
13日前
川崎重工業株式会社
作業設備
27日前
株式会社マキタ
打撃工具
26日前
工機ホールディングス株式会社
集塵装置及び作業機
1か月前
北越メタル株式会社
鉄筋保持具
26日前
株式会社マキタ
打撃工具
1か月前
コネクテッドロボティクス株式会社
ロボットシステム
23日前
日産自動車株式会社
ロックプレートの圧入治具
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ