TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025102036
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2023219221
出願日
2023-12-26
発明の名称
遠隔操作制御装置、遠隔操作制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
3/00 20060101AFI20250701BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数物体を扱うことができる遠隔操作制御装置、遠隔操作制御方法、およびプログラムを提供することを目的とする。
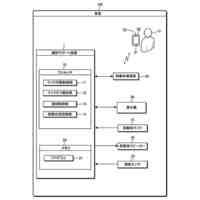
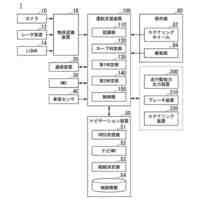
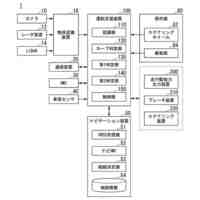
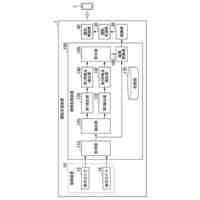
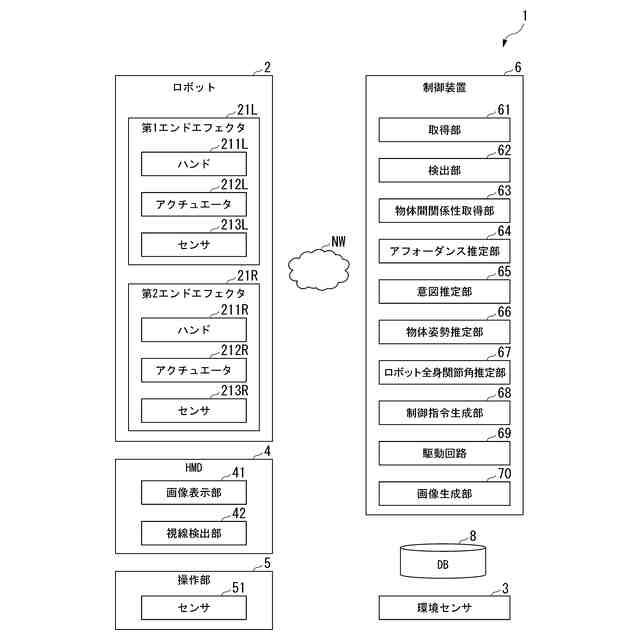
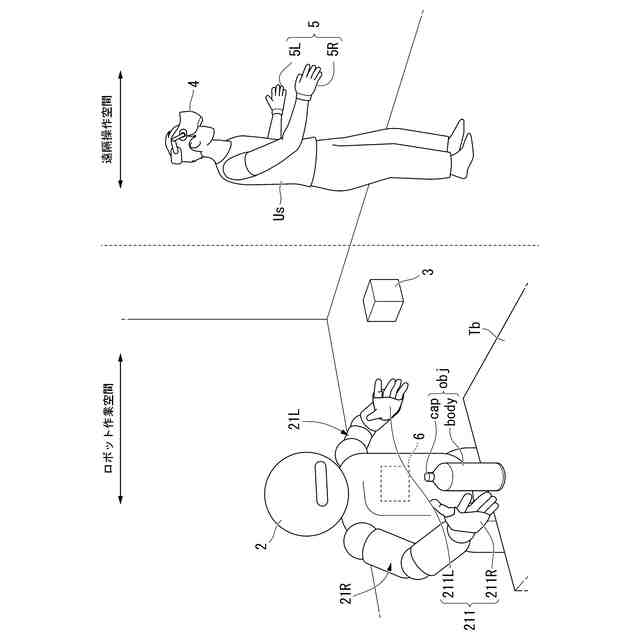
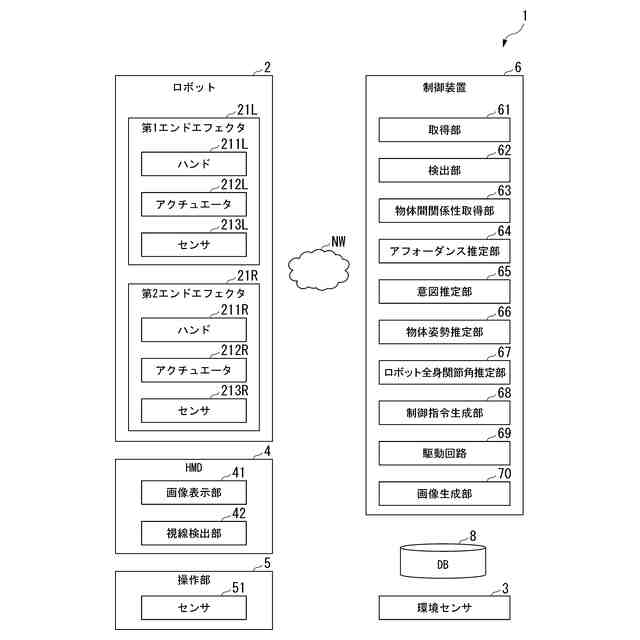
【解決手段】ロボットあるいは前記ロボットの周辺環境の情報を取得する環境センサによって得られた第1センサ値と、操作者センサによって得られた操作者の動きである第2センサ値と、に基づいて操作者の動作を推定する意図推定部と、第1の操作対象物体と、第2の対象物体の間の関係性を取得する関係性取得部と、推定された操作者の動作と、関係性取得部が取得した情報と、に基づいて制御指令を生成する制御指令生成部と、を備える遠隔操作制御装置。
【選択図】図3
特許請求の範囲
【請求項1】
操作者の動きを認識し、ロボットに前記操作者の動きを伝えて前記ロボットを操作するロボット遠隔操作において、
前記ロボットあるいは前記ロボットの周辺環境の情報を取得する環境センサによって得られた第1センサ値と、操作者センサによって得られた前記操作者の動きである第2センサ値と、に基づいて前記操作者の動作を推定する意図推定部と、
第1の操作対象物体と、第2の対象物体の間の関係性を取得する関係性取得部と、
推定された前記操作者の動作と、前記関係性取得部が取得した情報と、に基づいて制御指令を生成する制御指令生成部と、
を備える遠隔操作制御装置。
続きを表示(約 2,100 文字)
【請求項2】
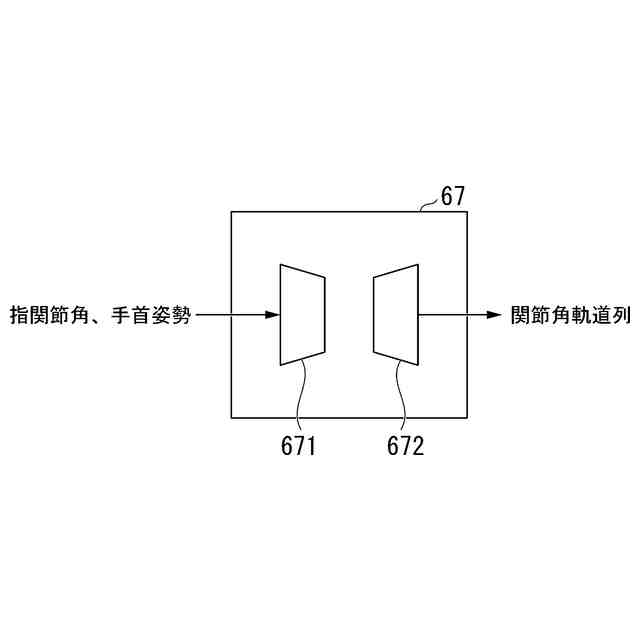
前記第2センサ値に含まれる前記操作者の指関節角度と手首姿勢とに基づいて、前記ロボットの全身の関節角を推定するロボット全身関節角推定部、をさらに備え、
前記制御指令生成部は、推定された前記ロボットの全身の関節角も用いて制御指令を生成する、
請求項1に記載の遠隔操作制御装置。
【請求項3】
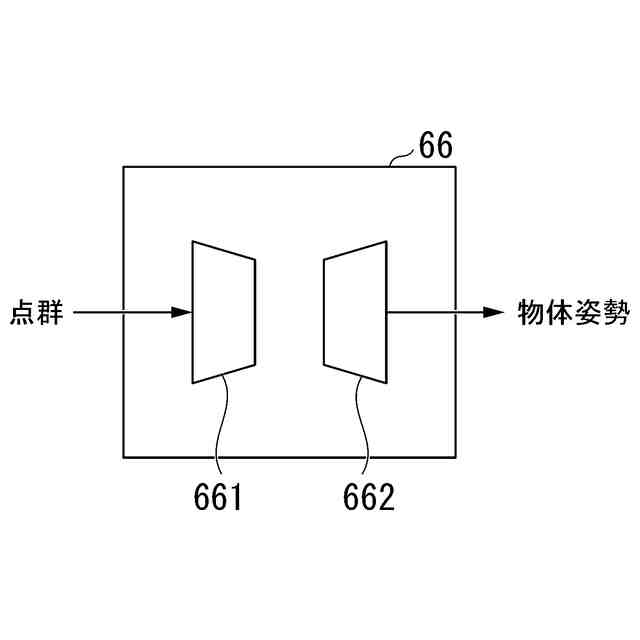
前記第1センサ値に基づいて、前記第1の操作対象物体と前記第2の対象物体それぞれの姿勢を推定する物体姿勢推定部、をさらに備え、
前記制御指令生成部は、推定された前記第1の操作対象物体と前記第2の対象物体それぞれの姿勢も用いて制御指令を生成する、
請求項1または請求項2に記載の遠隔操作制御装置。
【請求項4】
前記制御指令生成部は、
前記操作者の動作のうち一部の自由度に対して適切な制御指令を生成することで、操作者の動作の自由度を減らして制御指令を生成する、
請求項1または請求項2に記載の遠隔操作制御装置。
【請求項5】
前記第2の対象物体は、前記第1の操作対象物体と操作において関係がある物体である、
請求項1または請求項2に記載の遠隔操作制御装置。
【請求項6】
前記関係性取得部は、
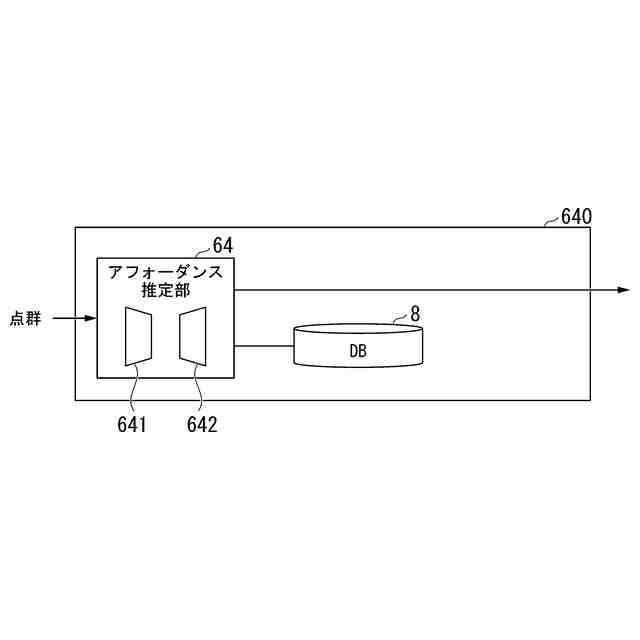
前記操作対象物体が複数存在する場合、前記操作対象物体同士の間、または操作対象物体と周辺環境の間の関係性を予め記述されているデータベースから前記対象物体を前記第1センサ値から特定した情報を用いて関係性情報を取得する、
請求項1または請求項2に記載の遠隔操作制御装置。
【請求項7】
前記関係性取得部は、
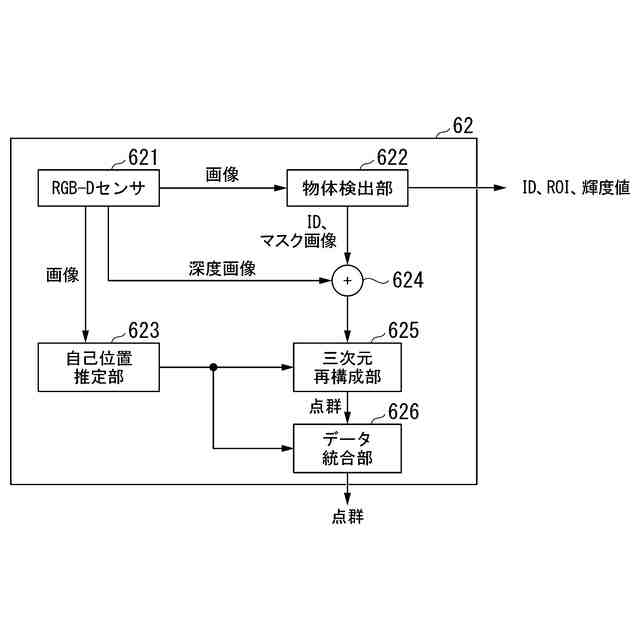
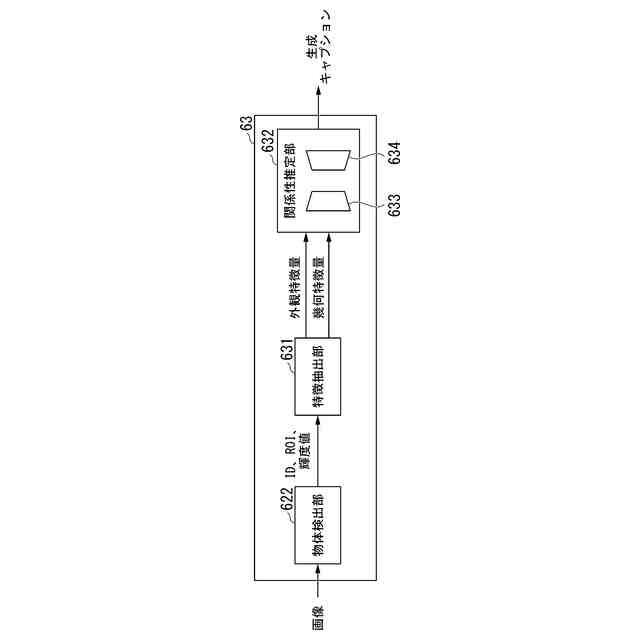
前記第1センサ値に含まれる画像を用いて検出された物体に関する識別情報と、関心領域の位置と大きさと、前記関心領域内の輝度を用いて、前記操作対象物体それぞれの外観特徴量と幾何特徴量を抽出し、抽出した前記操作対象物体それぞれの前記外観特徴量と前記幾何特徴量を用いて、前記第1の操作対象物体と前記第2の対象物体の間の関係性を取得して関係性をテキストで出力する、
請求項1または請求項2に記載の遠隔操作制御装置。
【請求項8】
前記第2センサ値に含まれる前記操作者の指関節角度と手首姿勢とに基づいて、前記ロボットの全身の関節角を推定するロボット全身関節角推定部と、
前記第1センサ値に基づいて、前記第1の操作対象物体と前記第2の対象物体それぞれの姿勢を推定する物体姿勢推定部、をさらに備え、
前記関係性取得部は、
前記第1センサ値に含まれる画像を用いて検出された物体に関する識別情報と、関心領域の位置と大きさと、前記関心領域内の輝度を用いて、前記操作対象物体それぞれの外観特徴量と幾何特徴量を抽出し、抽出した前記操作対象物体それぞれの前記外観特徴量と前記幾何特徴量を用いて、前記第1の操作対象物体と前記第2の対象物体の間の関係性を取得して関係性をテキストで出力し、
前記制御指令生成部は、
推定された前記操作者の動作と、推定された前記ロボットの全身の関節角と、推定された前記第1の操作対象物体と前記第2の対象物体それぞれの姿勢との組をエンコードして第1の特徴ベクトルを生成し、
前記関係性取得部が出力するテキストをエンコードして第2の特徴ベクトルを生成して、
前記第1の特徴ベクトルと、前記第2の特徴ベクトルとを関連付けて、関連付けたデータをエンコードすることで、前記ロボットの関節角軌道列である制御指令を生成する、
請求項1に記載の遠隔操作制御装置。
【請求項9】
操作者の動きを認識し、ロボットに前記操作者の動きを伝えて前記ロボットを操作するロボット遠隔操作を行う遠隔操作制御方法であって、
意図推定部は、前記ロボットあるいは前記ロボットの周辺環境の情報を取得する環境センサによって得られた第1センサ値と、操作者センサによって得られた前記操作者の動きである第2センサ値と、に基づいて前記操作者の動作を推定し、
関係性取得部は、第1の操作対象物体と、第2の対象物体の間の関係性を取得し、
制御指令生成部は、推定された前記操作者の動作と、前記関係性取得部が取得した情報と、に基づいて制御指令を生成する、
遠隔操作制御方法。
【請求項10】
操作者の動きを認識し、ロボットに前記操作者の動きを伝えて前記ロボットを操作するロボット遠隔操作を行う遠隔操作制御装置のコンピュータに、
前記ロボットあるいは前記ロボットの周辺環境の情報を取得する環境センサによって得られた第1センサ値と、操作者センサによって得られた前記操作者の動きである第2センサ値と、に基づいて前記操作者の動作を推定させ、
第1の操作対象物体と、第2の対象物体の間の関係性を取得させ、
推定された前記操作者の動作と、取得した第1の操作対象物体と、第2の対象物体の間の関係性の情報と、に基づいて制御指令を生成させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、遠隔操作制御装置、遠隔操作制御方法、およびプログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
多指ハンド(二指含む)を有するロボットの遠隔操作を非外骨格式の操作インタフェースで行うためには、物体毎に決められた操作に合わせて、ロボット軌道を制約することで操作性が向上する。
【0003】
例えば、特許文献1に記載の技術では、操作者の動きを認識し、ロボットに操作者の動きを伝えてロボットを操作するロボット遠隔操作において、意図推定部が、ロボットあるいはロボットの周辺環境に設置された環境センサによって得られたロボット環境センサ値と、操作者センサによって得られた操作者の動きである操作者センサ値とに基づいて操作者の動作を推定し、制御指令生成部が、推定された操作者の動作に基づいて、操作者の動作のうち一部の自由度に対して適切な制御指令を生成することで、操作者の動作の自由度を減らして制御指令を生成する。
【先行技術文献】
【特許文献】
【0004】
特開2022-157101号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来技術では、複数物体を扱う遠隔操作が困難であると課題があった。
【0006】
本発明は、上記の問題点に鑑みてなされたものであって、複数物体を扱うことができる遠隔操作制御装置、遠隔操作制御方法、およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)上記目的を達成するため、本発明の一態様に係る遠隔操作制御装置は、操作者の動きを認識し、ロボットに前記操作者の動きを伝えて前記ロボットを操作するロボット遠隔操作において、前記ロボットあるいは前記ロボットの周辺環境の情報を取得する環境センサによって得られた第1センサ値と、操作者センサによって得られた前記操作者の動きである第2センサ値と、に基づいて前記操作者の動作を推定する意図推定部と、第1の操作対象物体と、第2の対象物体の間の関係性を取得する関係性取得部と、推定された前記操作者の動作と、前記関係性取得部が取得した情報と、に基づいて制御指令を生成する制御指令生成部と、を備える遠隔操作制御装置である。
【0008】
(2)上記(1)の本発明の一態様に係る遠隔操作制御装置において、前記第2センサ値に含まれる前記操作者の指関節角度と手首姿勢とに基づいて、前記ロボットの全身の関節角を推定するロボット全身関節角推定部、をさらに備え、前記制御指令生成部は、推定された前記ロボットの全身の関節角も用いて制御指令を生成する、ようにしてもよい。
【0009】
(3)上記(1)または(2)の本発明の一態様に係る遠隔操作制御装置において、前記第1センサ値に基づいて、前記第1の操作対象物体と前記第2の対象物体それぞれの姿勢を推定する物体姿勢推定部、をさらに備え、前記制御指令生成部は、推定された前記第1の操作対象物体と前記第2の対象物体それぞれの姿勢も用いて制御指令を生成する、
ようにしてもよい。
【0010】
(4)上記(1)から(3)のうちのいずれか1つの本発明の一態様に係る遠隔操作制御装置において、前記制御指令生成部は、前記操作者の動作のうち一部の自由度に対して適切な制御指令を生成することで、操作者の動作の自由度を減らして制御指令を生成する、ようにしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
車両構造
16日前
本田技研工業株式会社
制御装置
14日前
本田技研工業株式会社
制御装置
14日前
本田技研工業株式会社
鞍乗型車両
7日前
本田技研工業株式会社
着座部材構造
14日前
本田技研工業株式会社
鞍乗り型車両
14日前
本田技研工業株式会社
蓄電システム
1日前
本田技研工業株式会社
非水電解質電池
13日前
本田技研工業株式会社
鞍乗り型電動車両
13日前
本田技研工業株式会社
通話サポート装置
13日前
本田技研工業株式会社
カメラの取付構造
13日前
本田技研工業株式会社
接着剤塗布システム
今日
本田技研工業株式会社
燃料電池用貼合方法
今日
本田技研工業株式会社
鞍乗型車両の排気装置
14日前
本田技研工業株式会社
動力伝達装置及び車両
20日前
本田技研工業株式会社
外界センサの保持構造
今日
本田技研工業株式会社
運転支援装置及び運転支援方法
15日前
本田技研工業株式会社
運転支援装置及び運転支援方法
15日前
本田技研工業株式会社
シート材の治具及びシート材の製造方法
13日前
ソニー・ホンダモビリティ株式会社
車両
15日前
本田技研工業株式会社
コンテンツ出力装置及びコンテンツ出力方法
15日前
本田技研工業株式会社
燃料電池用貼合治具および燃料電池用貼合方法
1日前
本田技研工業株式会社
燃料電池用貼合治具および燃料電池用貼合方法
今日
本田技研工業株式会社
車両制御装置、車両制御方法、およびプログラム
13日前
本田技研工業株式会社
画像処理装置、画像処理方法、およびプログラム
16日前
本田技研工業株式会社
車両制御装置、車両制御方法、およびプログラム
14日前
本田技研工業株式会社
車両制御装置、車両制御方法、およびプログラム
14日前
本田技研工業株式会社
画像処理装置、画像処理方法、およびプログラム
16日前
本田技研工業株式会社
移動体制御装置、移動体制御方法、及びプログラム
20日前
ソニー・ホンダモビリティ株式会社
車両の室内構造
15日前
ソニー・ホンダモビリティ株式会社
車両の室内構造
15日前
本田技研工業株式会社
管理システム、管理装置、管理方法およびプログラム
6日前
本田技研工業株式会社
管理システム、制御装置、制御方法およびプログラム
6日前
本田技研工業株式会社
電力供給システムおよび電力供給システムの制御方法
14日前
本田技研工業株式会社
情報処理システム、情報処理装置、および情報処理方法
20日前
本田技研工業株式会社
バッテリモジュールおよびバッテリモジュールの製造方法
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ