TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025099790
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216720
出願日
2023-12-22
発明の名称
移動体制御装置、移動体制御方法、及びプログラム
出願人
本田技研工業株式会社
代理人
弁理士法人大島特許事務所
主分類
B60W
30/165 20200101AFI20250626BHJP(車両一般)
要約
【課題】 操舵時に、先行移動体を適切に検出して追従制御する移動体制御装置を提供する。
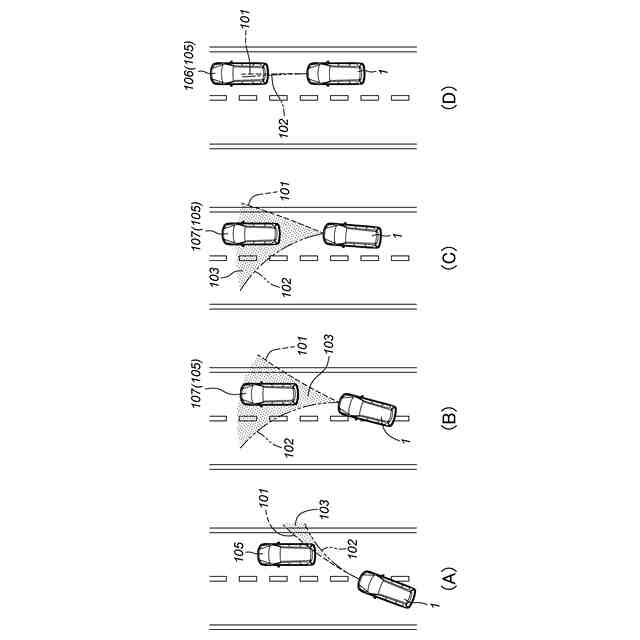
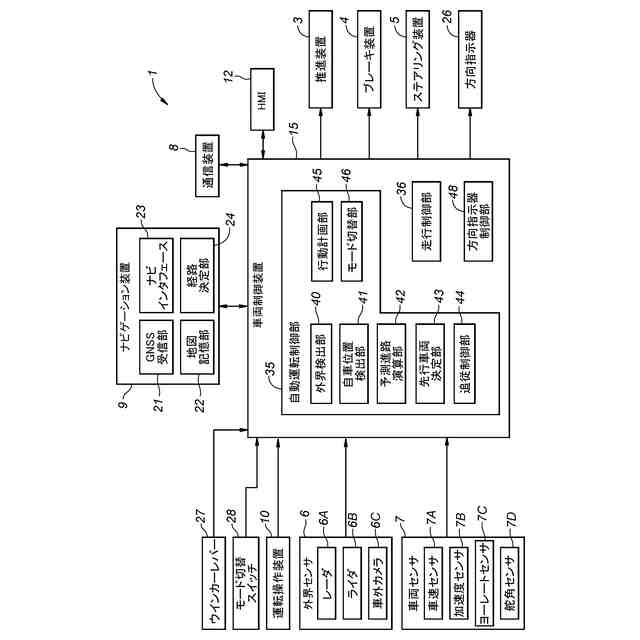
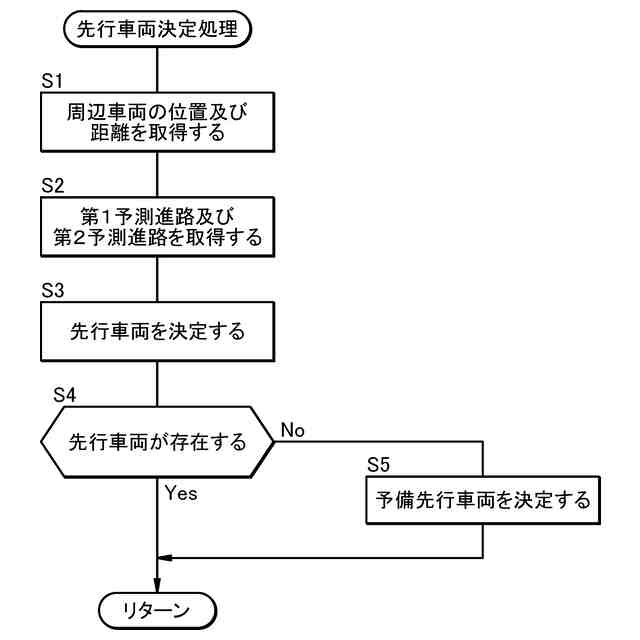
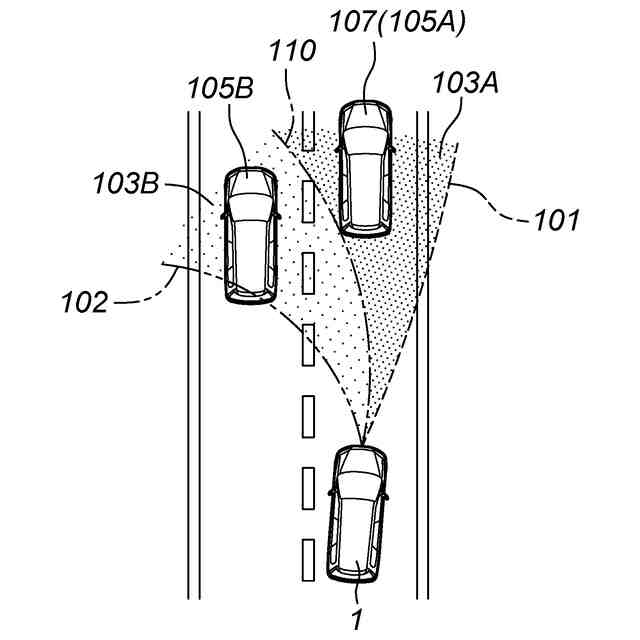
【解決手段】 移動体制御装置15は、周辺移動体105を検出する外界検出部40と、移動体1のヨーレートに基づいて第1予測進路101を演算すると共に、移動体の舵角に基づいて第2予測進路102を演算する予測進路演算部42と、第1予測進路、第2予測進路、及び周辺移動体の位置に基づいて、第1予測進路及び第2予測進路の少なくとも一方に重なる周辺移動体を先行移動体106に決定する先行移動体決定部43と、先行移動体に対する追従制御を行う追従制御部44とを有する。先行移動体決定部は、先行移動体に該当する周辺移動体が存在しない場合に、第1予測進路と第2予測進路との間に画定される中間領域103に重なる周辺移動体を予備先行移動体107に決定する。追従制御部は、予備先行移動体に対する追従制御を行う。
【選択図】 図3
特許請求の範囲
【請求項1】
移動体の走行制御を行う移動体制御装置であって、
前記移動体の周辺に存在する周辺移動体を検出する外界検出部と、
前記移動体のヨーレートに基づいて第1予測進路を演算すると共に、前記移動体の舵角に基づいて第2予測進路を演算する予測進路演算部と、
前記第1予測進路、前記第2予測進路、及び前記周辺移動体の位置に基づいて、前記第1予測進路及び前記第2予測進路の少なくとも一方に重なる前記周辺移動体を先行移動体に決定する先行移動体決定部と、
前記先行移動体に対する追従制御を行う追従制御部とを有し、
前記先行移動体決定部は、前記先行移動体に該当する前記周辺移動体が存在しない場合に、前記第1予測進路と前記第2予測進路との間に画定される中間領域に重なる前記周辺移動体を予備先行移動体に決定し、
前記追従制御部は、前記予備先行移動体に対する追従制御を行う移動体制御装置。
続きを表示(約 1,400 文字)
【請求項2】
前記追従制御部は、前記予備先行移動体に対する追従制御を開始した後、新たな前記先行移動体を決定するまで、前記予備先行移動体に対する追従制御を継続する請求項1に記載の移動体制御装置。
【請求項3】
前記追従制御部は、前記予備先行移動体に対する追従制御を開始した後、前記先行移動体決定部が新たな前記先行移動体を決定した場合に、前記先行移動体に対する追従制御を行う請求項2に記載の移動体制御装置。
【請求項4】
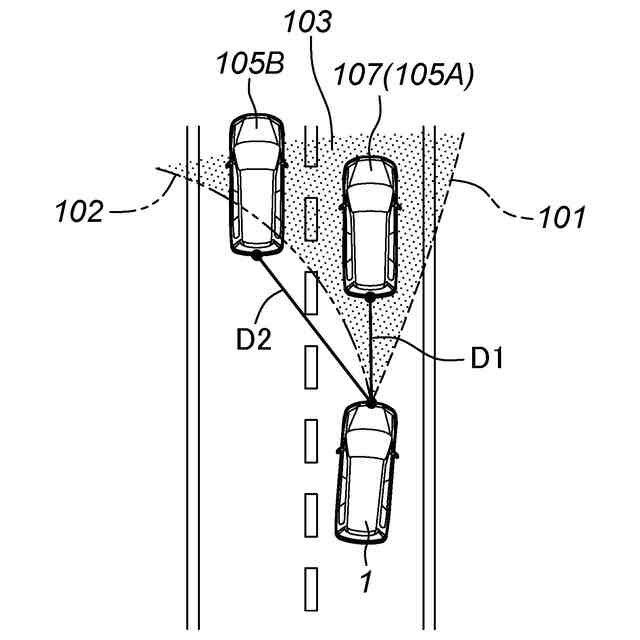
前記先行移動体決定部は、前記中間領域に重なる前記周辺移動体が複数存在する場合に、前記移動体からの距離が最も小さい前記周辺移動体を前記予備先行移動体に決定する請求項1に記載の移動体制御装置。
【請求項5】
前記先行移動体決定部は、前記中間領域に重なる前記周辺移動体が複数存在する場合に、車線変更方向を取得し、複数の前記周辺移動体の内で最も前記車線変更方向側に位置する前記周辺移動体を前記予備先行移動体に決定する請求項1に記載の移動体制御装置。
【請求項6】
前記先行移動体決定部は、前記周辺移動体が前記中間領域に重なっていることを所定の判定回数検出したときに、前記周辺移動体を前記予備先行移動体に決定し、
車線変更方向を取得し、
前記車線変更方向に基づいて前記中間領域を前記車線変更方向側の第1領域と、前記車線変更方向と相反する側の第2領域とに2分し、
前記第2領域における前記周辺移動体を前記予備先行移動体と決定するための前記判定回数を、前記第1領域における前記周辺移動体を前記予備先行移動体と決定するための前記判定回数よりも大きい値に設定する請求項1に記載の移動体制御装置。
【請求項7】
コンピュータが、移動体の走行制御を行うために実行する移動体制御方法であって、
前記移動体の周辺に存在する周辺移動体を検出し、
前記移動体のヨーレートに基づいて第1予測進路を演算し、
前記移動体の舵角に基づいて第2予測進路を演算し、
前記第1予測進路、前記第2予測進路、及び前記周辺移動体の位置に基づいて、前記第1予測進路及び前記第2予測進路に重なる前記周辺移動体を先行移動体に決定し、
前記先行移動体に対して前記移動体を追従させ、
前記先行移動体に該当する前記周辺移動体が存在しない場合に、前記第1予測進路と前記第2予測進路との間に画定される中間領域に重なる前記周辺移動体を予備先行移動体に決定し、
前記予備先行移動体に対して前記移動体を追従させる移動体制御方法。
【請求項8】
コンピュータに、移動体の走行制御を実行させるためのプログラムであって、
前記移動体の周辺に存在する周辺移動体を検出し、
前記移動体のヨーレートに基づいて第1予測進路を演算し、
前記移動体の舵角に基づいて第2予測進路を演算し、
前記第1予測進路、前記第2予測進路、及び前記周辺移動体の位置に基づいて、前記第1予測進路及び前記第2予測進路に重なる前記周辺移動体を先行移動体に決定し、
前記先行移動体に対して前記移動体を追従させ、
前記先行移動体に該当する前記周辺移動体が存在しない場合に、前記第1予測進路と前記第2予測進路との間に画定される中間領域に重なる前記周辺移動体を予備先行移動体に決定し、
前記予備先行移動体に対して前記移動体を追従させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体制御装置、移動体制御方法、及びプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、交通参加者の中でも脆弱な立場にある人々にも配慮した持続可能な輸送システムを提供する取り組みが活発化している。この実現に向けて、交通の安全性や利便性をより一層改善するために、運転支援技術や自動運転技術に関する研究開発が行われている。
【0003】
例えば、特許文献1は、追従走行を実行するための先行車の決定方法について開示している。この方法では、自車両の予測進路と、先行車の位置とに基づいて先行車を決定している。自車両の予測進路は、ヨーレートに基づいて決定している。
【先行技術文献】
【特許文献】
【0004】
特許第5522157号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
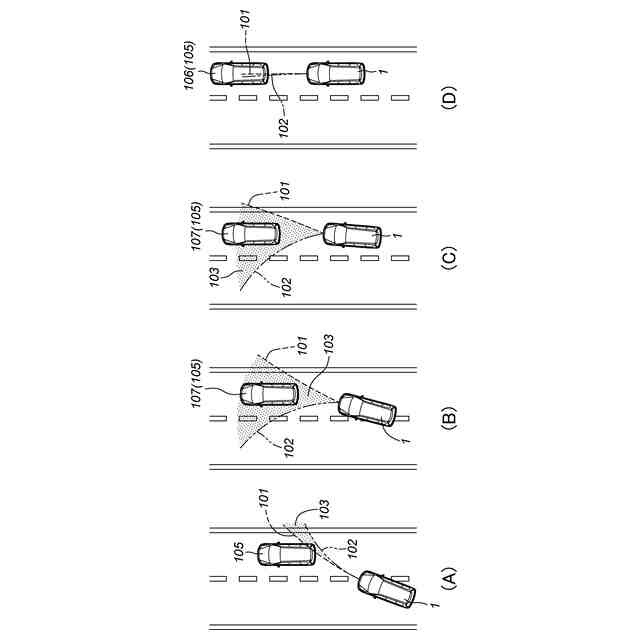
ヨーレートは舵角に対して遅れて発生するため、舵角を用いて自車両の予測進路を推定することによって、ヨーレートを用いる場合よりもカーブの入口や出口において迅速に自車両の予測進路を演算することができる。しかし、操舵時に、ヨーレートに基づく第1予測進路と、舵角に基づく第2予測進路との差が大きくなり、実際に存在する先行車が第1予測進路及び第2予測進路の間に位置し、先行車として検出されないという問題がある。特に、舵角の切り戻し時に、第1予測進路と第2予測進路との差が大きくなることがある。この場合、自車両が先行車を見失い、追従制御によって不要な加速が行われる虞がある。
【0006】
本発明は、以上の背景を鑑み、操舵時に、先行移動体を適切に検出して追従制御する移動体制御装置、移動体制御方法、及びプログラムを提供することを課題とする。これにより、本発明は、持続可能な輸送システムの発展に貢献することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために本発明のある態様は、移動体(1)の走行制御を行う移動体制御装置(15)であって、前記移動体の周辺に存在する周辺移動体(105)を検出する外界検出部(40)と、前記移動体のヨーレートに基づいて第1予測進路(101)を演算すると共に、前記移動体の舵角に基づいて第2予測進路(102)を演算する予測進路演算部(42)と、前記第1予測進路、前記第2予測進路、及び前記周辺移動体の位置に基づいて、前記第1予測進路及び前記第2予測進路の少なくとも一方に重なる前記周辺移動体を先行移動体(106)に決定する先行移動体決定部(43)と、前記先行移動体に対する追従制御を行う追従制御部(44)とを有し、前記先行移動体決定部は、前記先行移動体に該当する前記周辺移動体が存在しない場合に、前記第1予測進路と前記第2予測進路との間に画定される中間領域(103)に重なる前記周辺移動体を予備先行移動体(107)に決定し、前記追従制御部は、前記予備先行移動体に対する追従制御を行う。
【0008】
この態様によれば、移動体制御装置は、第1予測進路と第2予測進路とが相違する操舵時に、第1予測進路と第2予測進路との間に存在する周辺移動体を予備先行移動体として適切に検出することができる。また、移動体制御装置は、予備先行移動体に対して追従制御を行うため、不要な加速を避けることができる。これにより、先行移動体を適切に検出して追従制御する移動体制御装置を提供することができる。
【0009】
上記の態様において、前記追従制御部は、前記予備先行移動体に対する追従制御を開始した後、新たな前記先行移動体を決定するまで、前記予備先行移動体に対する追従制御を継続してもよい。
【0010】
この態様によれば、移動体制御装置は、先行移動体が検出されるまで予備先行移動体に対する追従制御を継続することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
1か月前
個人
警告装置
2か月前
個人
車窓用防虫網戸
1か月前
個人
小型EVシステム
2か月前
個人
車輪清掃装置
1か月前
日本精機株式会社
ケース
3か月前
個人
ホイルのボルト締結
6日前
個人
アンチロール制御装置
3か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
3か月前
井関農機株式会社
作業車両
28日前
個人
キャンピングトライク
21日前
井関農機株式会社
作業車両
26日前
株式会社松華
懸架装置
3か月前
個人
ブレーキシステム
3か月前
個人
キャンピングトレーラー
21日前
個人
アクセルのソフトウェア
11日前
個人
ワイパーゴム性能保持具
1か月前
個人
車両用スリップ防止装置
12日前
日本精機株式会社
車載表示装置
7日前
株式会社クラベ
ヒータユニット
1か月前
個人
自走式立体型洗車場
3か月前
個人
自動車ドア開度規制ベルト
2か月前
株式会社ニフコ
保持装置
5日前
井関農機株式会社
収穫作業車両
1か月前
個人
車載小物入れ兼雨傘収納具
4日前
横浜ゴム株式会社
タイヤ
3か月前
日本精機株式会社
車両用投影装置
28日前
日本精機株式会社
車両用表示装置
12日前
トヨタ自動車株式会社
車両
25日前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用投影装置
28日前
帝国繊維株式会社
作業車両
2か月前
日本精機株式会社
車両用表示装置
1か月前
井関農機株式会社
作業車両
18日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ