TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025103612
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023221115
出願日
2023-12-27
発明の名称
車両制御装置、車両制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20250702BHJP(信号)
要約
【課題】環境に応じてより適切に車両が道路区画線から逸脱することを抑制することを支援すること。
【解決手段】車両制御装置は、車両の走路の道路区画線を認識する認識部と、前記車両に対する前記道路区画線の位置と前記車両の状態とに基づいて得られた前記車両が前記道路区画線に到達するまでの時間が閾値以下であると判定した場合に、前記車両が前記道路区画線を逸脱する可能性が高いと判定する判定処理部と、前記車両が前記道路区画線を逸脱する可能性が高いと判定された場合、前記車両が前記道路区画線から逸脱することを抑制することを支援する制御を行う制御部と、を備え、前記判定処理部は、前記閾値を予め設定された固定値である第1閾値に設定する第1処理と、前記閾値を可変値である第2閾値に設定する第2処理とを、前記車両の走路の形状に基づいて切り替える。
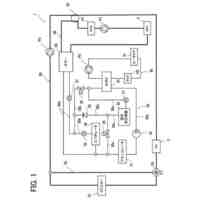
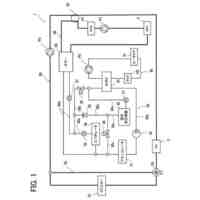
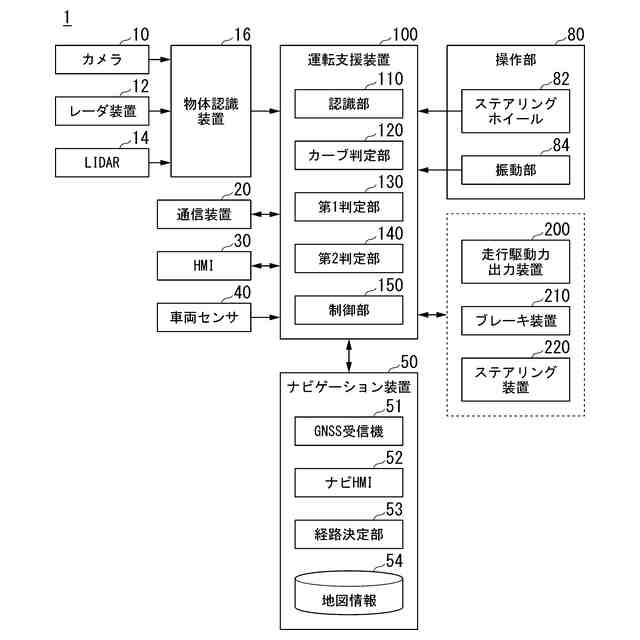
【選択図】図1
特許請求の範囲
【請求項1】
車両の走路の道路区画線を認識する認識部と、
前記車両に対する前記道路区画線の位置と前記車両の状態とに基づいて得られた前記車両が前記道路区画線に到達するまでの時間が閾値以下であると判定した場合に、前記車両が前記道路区画線を逸脱する可能性が高いと判定する判定処理部と、
前記車両が前記道路区画線を逸脱する可能性が高いと判定された場合、前記車両が前記道路区画線から逸脱することを抑制することを支援する制御を行う制御部と、を備え、
前記判定処理部は、前記閾値を予め設定された固定値である第1閾値に設定する第1処理と、前記閾値を可変値である第2閾値に設定する第2処理とを、前記車両の走路の形状に基づいて切り替える、
車両制御装置。
続きを表示(約 1,200 文字)
【請求項2】
前記判定処理部は、
前記車両の走路がカーブ路でないと判定した場合に前記第1処理を実行し、
前記車両の走路がカーブ路であると判定した場合に前記第2処理を実行する、
請求項1に記載の車両制御装置。
【請求項3】
前記判定処理部は、前記走路の曲がり具合に基づいて、前記第2閾値を設定する、
請求項1または2に記載の車両制御装置。
【請求項4】
前記判定処理部は、前記曲がり具合の変化度合が大きいほど、前記第2閾値を大きくする、
請求項3に記載の車両制御装置。
【請求項5】
前記判定処理部は、
前記走路の形状がカーブ路であり、前記カーブ路のカーブの曲率半径が設定閾値を超える場合に、前記第1処理を実行し、
前記走路の形状がカーブ路であり、前記カーブ路のカーブの曲率半径が設定閾値以下の場合に、前記第2処理を実行する、
請求項1または2に記載の車両制御装置。
【請求項6】
前記判定処理部は、
前記走路の形状がカーブ路である場合において、
前記カーブ路の内側の道路区画線に対する閾値の設定については前記第1処理を実行し、
前記カーブ路の外側の道路区画線に対する閾値の設定については前記第2処理を実行する、
請求項1または2に記載の車両制御装置。
【請求項7】
前記判定処理部は、
前記走路の形状がカーブ路である場合において、
前記走路の車線の幅が所定幅以下の場合に前記第1処理を実行し、
前記走路の車線の幅が所定幅を超える場合に前記第2処理を実行する、
請求項1または2に記載の車両制御装置。
【請求項8】
前記判定処理部は、
前記走路の両側の道路区画線のうち一方の道路区画線が認識できない場合、前記第1処理を実行し、
前記走路の両側の道路区画線の両方の道路区画線が認識できる場合、前記第2処理を実行する、
請求項1または2に記載の車両制御装置。
【請求項9】
前記判定処理部は、
前記走路の両側の道路区画線のうち一方の道路区画線が認識できない場合、前記道路区画線の一方の道路区画線が認識できない地点から所定距離手前から前記第1処理を実行する、
請求項1または2に記載の車両制御装置。
【請求項10】
車両の走路の道路区画線を認識する認識部と、
前記車両に対する前記道路区画線の位置と前記車両の状態とに基づいて、前記車両が走路の前記道路区画線に所定度合以上近づいた場合に、前記車両が前記道路区画線から逸脱することを抑制することを支援する制御を行う制御部と、を備え、
前記制御部は、前記道路の形状に基づいて、前記支援を行うタイミングを変更する、
車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置、車両制御方法、およびプログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
近年、交通参加者の中でも脆弱な立場にある人々にも配慮した持続可能な輸送システムへのアクセスを提供する取り組みが活発化している。この実現に向けて予防安全技術に関する研究開発を通して交通の安全性や利便性をより一層改善する研究開発に注力している。例えば、従来、経路の曲率変化を検出する曲率変化検出手段を設け、前記目標減速度算出手段は、経路の曲率変化が大きいとき、減速制御量を増加させることを特徴とする装置が開示されている(例えば特許文献1の請求項8参照)。
【先行技術文献】
【特許文献】
【0003】
特開2004-345505号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の装置では、車両が道路区画線から逸脱することを抑制することを支援することについては十分に検討されていなかった。
【0005】
本発明は、このような事情を考慮してなされたものであり、環境に応じてより適切に車両が道路区画線から逸脱することを抑制することを支援することができる車両制御装置、車両制御方法、およびプログラムを提供することを目的の一つとする。上記のように予防安全技術の向上を行い、延いては持続可能な輸送システムの発展に寄与するものである。
【課題を解決するための手段】
【0006】
この発明に係る車両制御装置、車両制御方法、およびプログラムは、以下の構成を採用した。
(1):この発明の一態様に係る車両装置は、車両の走路の道路区画線を認識する認識部と、前記車両に対する前記道路区画線の位置と前記車両の状態とに基づいて得られた前記車両が前記道路区画線に到達するまでの時間が閾値以下であると判定した場合に、前記車両が前記道路区画線を逸脱する可能性が高いと判定する判定処理部と、前記車両が前記道路区画線を逸脱する可能性が高いと判定された場合、前記車両が前記道路区画線から逸脱することを抑制することを支援する制御を行う制御部と、を備え、前記判定処理部は、前記閾値を予め設定された固定値である第1閾値に設定する第1処理と、前記閾値を可変値である第2閾値に設定する第2処理とを、前記車両の走路の形状に基づいて切り替える。
【0007】
(2):上記(1)の態様において、前記判定処理部は、前記車両の走路がカーブ路でないと判定した場合に前記第1処理を実行し、前記車両の走路がカーブ路であると判定した場合に前記第2処理を実行する。
【0008】
(3):上記(1)または(2)の態様において、前記判定処理部は、前記走路の曲がり具合に基づいて、前記第2閾値を設定する。
【0009】
(4):上記(3)の態様において、前記判定処理部は、前記曲がり具合の変化度合が大きいほど、前記第2閾値を大きくする。
【0010】
(5):上記(1)または(2)の態様において、前記判定処理部は、前記走路の形状がカーブ路であり、前記カーブ路のカーブの曲率半径が設定閾値を超える場合に、前記第1処理を実行し、前記走路の形状がカーブ路であり、前記カーブ路のカーブの曲率半径が設定閾値以下の場合に、前記第2処理を実行する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
航空機
1か月前
本田技研工業株式会社
回転電機
20日前
本田技研工業株式会社
回転電機
1か月前
本田技研工業株式会社
クリップ
1か月前
本田技研工業株式会社
制御装置
14日前
本田技研工業株式会社
車両構造
16日前
本田技研工業株式会社
制御装置
14日前
本田技研工業株式会社
車載検出器
1か月前
本田技研工業株式会社
鞍乗型車両
7日前
本田技研工業株式会社
鞍乗り型車両
23日前
本田技研工業株式会社
着座部材構造
14日前
本田技研工業株式会社
鞍乗り型車両
1か月前
本田技研工業株式会社
鞍乗り型車両
1か月前
本田技研工業株式会社
鞍乗り型車両
14日前
本田技研工業株式会社
蓄電システム
1日前
本田技研工業株式会社
鞍乗り型車両
1か月前
本田技研工業株式会社
温調システム
27日前
本田技研工業株式会社
着用物着脱装置
27日前
本田技研工業株式会社
コイル成形部材
1か月前
本田技研工業株式会社
コイルユニット
1か月前
本田技研工業株式会社
バッテリパック
1か月前
本田技研工業株式会社
バッテリパック
1か月前
本田技研工業株式会社
非水電解質電池
13日前
本田技研工業株式会社
バッテリパック
1か月前
本田技研工業株式会社
バッテリパック
1か月前
本田技研工業株式会社
カメラの取付構造
13日前
本田技研工業株式会社
鞍乗り型電動車両
1か月前
本田技研工業株式会社
ステアリング装置
1か月前
本田技研工業株式会社
電池劣化推定装置
1か月前
本田技研工業株式会社
鞍乗り型電動車両
1か月前
本田技研工業株式会社
通話サポート装置
13日前
本田技研工業株式会社
車両電源システム
1か月前
本田技研工業株式会社
鞍乗り型電動車両
13日前
本田技研工業株式会社
セル電圧検出装置
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ