TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025083756
公報種別
公開特許公報(A)
公開日
2025-06-02
出願番号
2023197326
出願日
2023-11-21
発明の名称
車載検出器
出願人
本田技研工業株式会社
代理人
個人
,
個人
主分類
G01S
17/89 20200101AFI20250526BHJP(測定;試験)
要約
【課題】車載検出器としてのニーズを満たすこと。
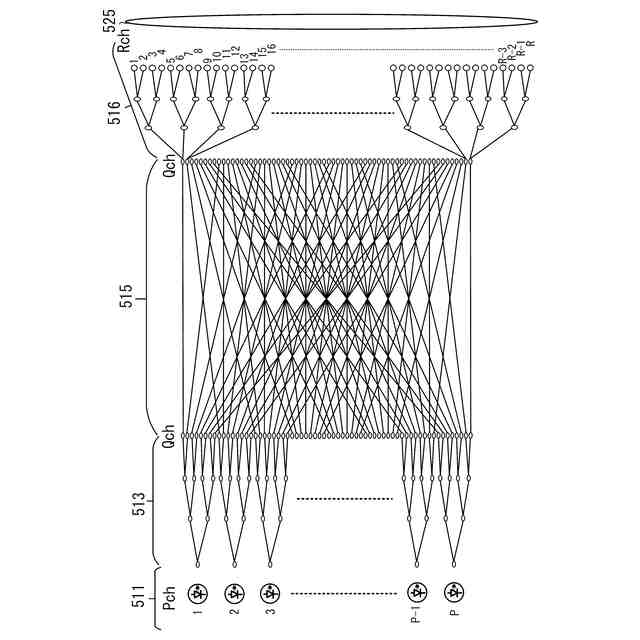
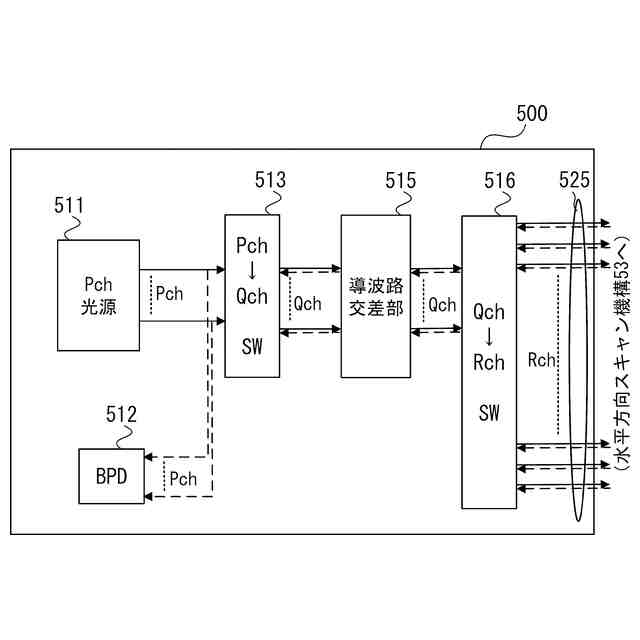
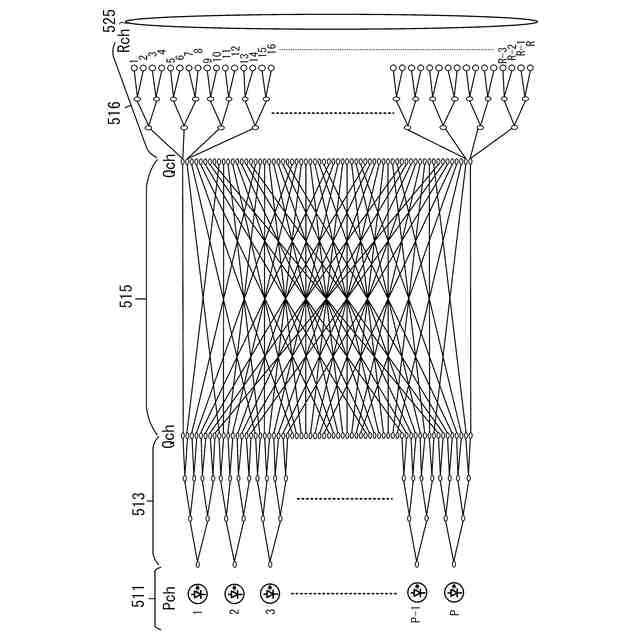
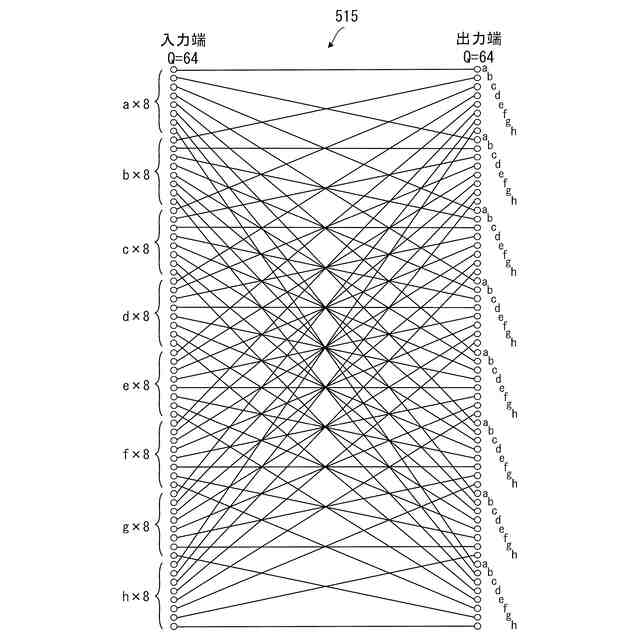
【解決手段】車載検出器の第1および第2の走査部の少なくとも一方は、複数の光源A~Pからの光信号をそれぞれ入力し、それぞれの光信号の出力先を、複数チャネルの出力先のうちの一つへ選択的に切り替える第1の光分岐部513と、第1の光分岐部513から出力された複数の光信号のうちの少なくとも一部の光信号を交差させる導波路型の交差部515と、交差部515から出力された複数の光信号をそれぞれ入力し、それぞれの光信号の出力先を、複数チャネルの出力先のうちの一つへ選択的に切り替える第2の光分岐部516と、を備える。
【選択図】図6
特許請求の範囲
【請求項1】
光信号を第1の方向に走査照射する第1の走査部と、前記光信号を前記第1の方向と交差する第2の方向に走査照射する第2の走査部とを備え、視野内に前記光信号を走査照射して外界状況を検出する車載検出器であって、
前記第1の走査部および前記第2の走査部の少なくとも一方は、
複数の光源からの前記光信号をそれぞれ入力し、それぞれの光信号の出力先を、複数チャネルの出力先のうちの一つへ選択的に切り替える第1の光分岐部と、
前記第1の光分岐部から出力された複数の前記光信号のうちの少なくとも一部の光信号を交差させる導波路型の交差部と、
前記交差部から出力された複数の前記光信号をそれぞれ入力し、それぞれの光信号の出力先を、複数チャネルの出力先のうちの一つへ選択的に切り替える第2の光分岐部と、
を備えることを特徴とする車載検出器。
続きを表示(約 2,100 文字)
【請求項2】
請求項1に記載の車載検出器において、
前記第1の光分岐部は、
第1の光源からの光信号を入力し、第1所定数のチャネルの出力先のうちの一つから前記光信号を選択的に出力する第1の光スイッチと、
第2の光源からの光信号を入力し、第2所定数のチャネルの出力先のうちの一つから前記光信号を選択的に出力する第2の光スイッチと、を含み、
前記交差部は、前記第1の光スイッチから出力された前記光信号および前記第2の光スイッチから出力された前記光信号のうちの少なくとも一部の光信号を交差させ、
前記第2の光分岐部は、
前記交差部から出力された前記光信号のうちの前記第1の光スイッチから出力された前記光信号を入力し、第3所定数のチャネルの出力先のうちの一つから前記光信号を選択的に出力する前記第1所定数の第3の光スイッチと、
前記交差部から出力された前記光信号のうちの前記第2の光スイッチから出力された前記光信号を入力し、前記第3所定数のチャネルの出力先のうちの一つから前記光信号を選択的に出力する前記第2所定数の第4の光スイッチと、を含む、
ことを特徴とする車載検出器。
【請求項3】
請求項2に記載の車載検出器において、
前記導波路交差部は、
前記第1の光源からの前記光信号を入力する前記第1所定数のチャネルの入力端と、前記第2の光源からの前記光信号を入力する前記第2所定数のチャネルの入力端と、を複数チャネルの入力端として含むとともに、
前記第1の光源からの前記光信号を出力する前記第1所定数のチャネルの出力端と、前記第2の光源からの前記光信号を出力する前記第2所定数のチャネルの出力端と、を複数チャネルの出力端として含み、
前記複数チャネルの入力端において隣り合うチャネルに入力された前記光信号が、前記複数チャネルの出力端において隣り合わないチャネルから出力されるように前記光信号を交差させる、
ことを特徴とする車載検出器。
【請求項4】
請求項2または3に記載の車載検出器において、
前記交差部は、前記第1の光スイッチおよび前記第2の光スイッチと、前記第3の光スイッチおよび前記第4の光スイッチとの間に設けられる、
ことを特徴とする車載検出器。
【請求項5】
請求項4に記載の車載検出器において、
前記第1の光源からの前記光信号は、前記視野内の第1領域に投光され、
第2の光源からの光信号は、前記視野内の第2領域に投光されるとともに、
前記第1領域と前記第2領域とは同じ投光タイミングで投光可能に構成される、
ことを特徴とする車載検出器。
【請求項6】
請求項5に記載の車載検出器において、
前記第1の光源からの前記光信号はさらに、前記視野内の第3領域に投光され、
前記第2の光源からの光信号はさらに、前記視野内の第4領域に投光されるとともに、
前記第3領域と前記第4領域とは同じ投光タイミングで、かつ前記第1領域と前記第3領域とは異なるタイミングで、かつ前記第2領域と前記第4領域とは異なるタイミングで投光可能に構成される、
ことを特徴とする車載検出器。
【請求項7】
請求項6に記載の車載検出器において、
前記第1の光源からの光信号はさらに、前記視野内の前記第5領域に投光され、
前記第2の光源からの光信号はさらに、前記視野内の前記第6領域へ投光されるとともに、
前記第5領域と前記第6領域とは同じ投光タイミングで、かつ前記第1領域と前記第3領域と前記第5領域とは互いに異なるタイミングで、かつ前記第2領域と前記第4領域と前記第6領域とは互いに異なるタイミングで投光可能に構成される、
ことを特徴とする車載検出器。
【請求項8】
請求項1に記載の車載検出器において、
前記第1の光分岐部は、
第1の光源からの前記光信号(光b)を入力し、m1チャネルの出力先のうちの一つから前記光信号を選択的に出力する第1の光スイッチと、
第2の光源からの前記光信号(光c)を入力し、m2チャネルの出力先のうちの一つから前記光信号を選択的に出力する第2の光スイッチと、を含み、
前記交差部は、前記第1の光スイッチから出力された前記光信号および前記第2の光スイッチから出力された前記光信号のうちの少なくとも一部の光信号を交差させ、
前記第2の光分岐部は、
前記交差部から出力された前記光信号のうちの前記第1の光スイッチから出力された前記光信号(光b)を入力し、sチャネルの出力先のうちの一つから前記光信号を選択的に出力する前記m1個の第3の光スイッチと、
前記交差部から出力された前記光信号のうちの前記第2の光スイッチから出力された前記光信号(光c)を入力し、前記sチャネルの出力先のうちの一つから前記光信号を選択的に出力する前記m2個の第4の光スイッチと、を含む、
ことを特徴とする車載検出器。
発明の詳細な説明
【技術分野】
【0001】
本発明は、物体の検知や物体までの距離等を計測する車載検出器に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
自動運転技術を支えるキーデバイスとしてLiDAR(Light Detection And Ranging)が知られている。ライダは、照射するレーザ光の照射角度を二軸方向にそれぞれ変化させてスキャンを行い、各検出点の位置情報に基づいて物体の検知や物体までの距離等を計測する。
例えば特許文献1には、視野内の異なるサンプル領域にレーザ光を照射するために、光フェーズドアレイ(OPA)等の分波要素を動作させるライダシステムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特表2022-517857号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一般に、ライダが自動車等に搭載される場合は一軸当たり数百以上の照射点へレーザ光を照射することが必要である。従来の技術を用いる場合、2チャネルの出力端のうちの一つからレーザ光を選択的に出力する分波要素を積み重ねて数百以上の出力端を一つずつ切り替えるだけであるため、最終段において複数の出力端からレーザ光を密に出力させることが難しい。
【課題を解決するための手段】
【0005】
本発明の一態様である車載検出器は、光信号を第1の方向に走査照射する第1の走査部と、光信号を第1の方向と交差する第2の方向に走査照射する第2の走査部とを備え、視野内に光信号を走査照射して外界状況を検出する車載検出器であって、第1の走査部および第2の走査部の少なくとも一方は、複数の光源からの光信号をそれぞれ入力し、それぞれの光信号の出力先を、複数チャネルの出力先のうちの一つへ選択的に切り替える第1の光分岐部と、第1の光分岐部から出力された複数の光信号のうちの少なくとも一部の光信号を交差させる導波路型の交差部と、交差部から出力された複数の光信号をそれぞれ入力し、それぞれの光信号の出力先を、複数チャネルの出力先のうちの一つへ選択的に切り替える第2の光分岐部と、を備える。
【発明の効果】
【0006】
本発明によれば、車載検出器としてのニーズを満たすことが可能になる。
【図面の簡単な説明】
【0007】
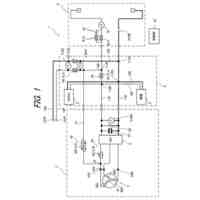
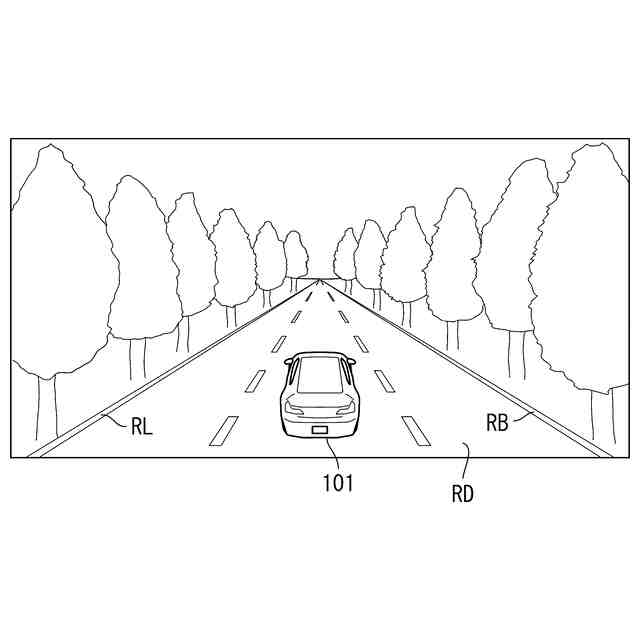
車両が道路を走行する様子を示す図。
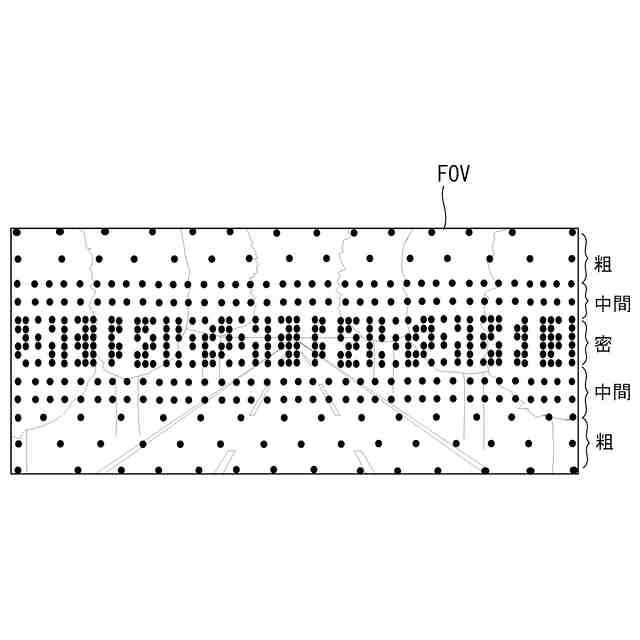
ライダによる検出データの一例を示す模式図。
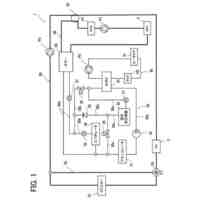
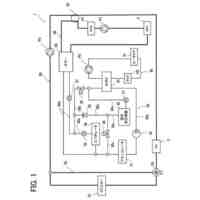
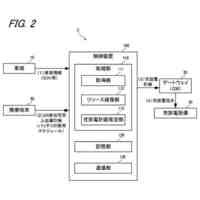
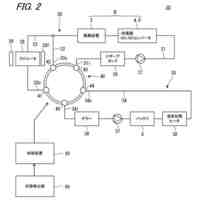
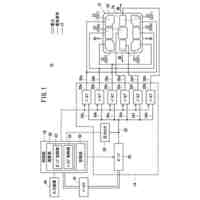
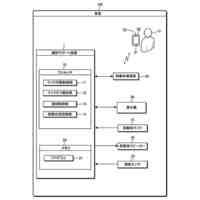
車両制御装置の要部構成を示すブロック図。
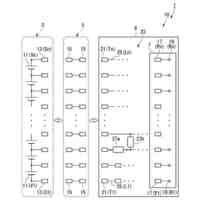
ライダによる照射点を説明する模式図。
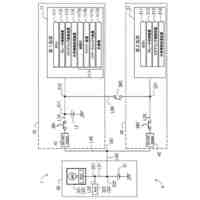
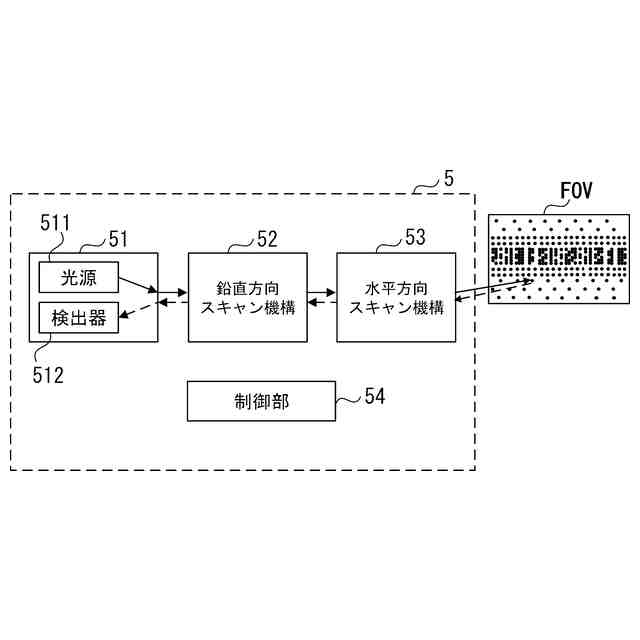
実施の形態に係るライダの構成を例示する模式図。
図4の送受信器と鉛直方向のスキャン機構とを一体に構成した鉛直方向のスキャン機構の要部構成を例示するブロック図。
図5から抜粋した送出光の分岐部の全体構成を例示する、模式図。
図6のうちの光源および第1スイッチ群を説明する図。
図6のうちの導波路交差部を説明する図。
図6のうちの第2スイッチ群を説明する図。
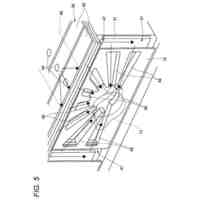
図2のコントローラのCPUで実行される処理の一例を示すフローチャート。
変形例3における光源および第1スイッチ群を説明する図。
変形例3における導波路交差部を説明する図。
変形例3における第2スイッチ群を説明する図。
【発明を実施するための形態】
【0008】
以下に、図面を参照して発明の実施の形態について説明する。
はじめに、発明の実施の形態に係る車載検出器としてのライダ装置(以下、ライダと呼ぶ)を用いた外界認識装置およびこの外界認識装置を搭載する車両について説明する。
外界認識装置は、自動運転機能を有する車両、すなわち自動運転車両に搭載することができる。なお、実施の形態では、外界認識装置が搭載される車両を、他車両と区別して自車両と呼ぶことがある。自車両は、内燃機関(エンジン)を走行駆動源として有するエンジン車両、走行モータを走行駆動源として有する電気自動車、エンジンと走行モータとを走行駆動源として有するハイブリッド車両のいずれであってもよい。自車両は、ドライバによる運転操作が不要な自動運転モードでの走行だけでなく、ドライバの運転操作による手動運転モードでの走行も可能である。
【0009】
自動運転車両は、自動運転モードでの走行(以下、自動走行または自律走行と呼ぶ)時に、ライダやカメラ等の車載検出器の検出データに基づき自車両の周囲の外界状況を認識する。自動運転車両は、その認識結果に基づいて、現時点から所定時間より先の走行軌道(目標軌道)を生成し、目標軌道に沿って自車両が走行するように走行用アクチュエータを制御する。
【0010】
図1Aは、自動運転車両である自車両101が道路RDを走行する様子を示す図である。図1Bは、自車両101に搭載され、自車両101の進行方向に向けられたライダにより得られた検出データの一例を示す模式図である。ライダによる計測点(検出点と呼んでもよい)は、照射したレーザが物体の表面のある1点で反射(散乱)して戻ってくる点情報に対応する。点情報は、レーザ源からその点までの距離と、反射(散乱)して戻ってきたレーザの強度と、レーザ源とその点との相対速度とを含む。
図1Bに示すような複数の検出点で構成されるデータを、点群データと呼ぶ。図1Bには、図1Aの物体のうち、ライダの視野(Field of view;以下FOVと呼ぶ)に含まれる物体の表面の検出点に基づく点群データが示されている。FOVは、例えば、自車両101の水平方向(道路幅方向と呼んでもよい)に120 deg、鉛直方向(上下方向と呼んでもよい)に25 degとしてもよい。FOVの値は、外界認識装置の仕様に基づいて適宜変更して構わない。自車両101は、図1Bに示すような点群データに基づいて車両周囲の外界状況、より具体的には車両周囲の道路構造および物体等を認識し、その認識結果に基づいて目標軌道を生成する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
航空機
1か月前
本田技研工業株式会社
クリップ
1か月前
本田技研工業株式会社
回転電機
22日前
本田技研工業株式会社
車両構造
18日前
本田技研工業株式会社
制御装置
16日前
本田技研工業株式会社
制御装置
16日前
本田技研工業株式会社
回転電機
1か月前
本田技研工業株式会社
鞍乗型車両
9日前
本田技研工業株式会社
車載検出器
1か月前
本田技研工業株式会社
鞍乗り型車両
25日前
本田技研工業株式会社
鞍乗り型車両
1か月前
本田技研工業株式会社
鞍乗り型車両
1か月前
本田技研工業株式会社
着座部材構造
16日前
本田技研工業株式会社
鞍乗り型車両
16日前
本田技研工業株式会社
鞍乗り型車両
1か月前
本田技研工業株式会社
温調システム
29日前
本田技研工業株式会社
固体二次電池
1日前
本田技研工業株式会社
蓄電システム
3日前
本田技研工業株式会社
バッテリパック
1か月前
本田技研工業株式会社
着用物着脱装置
29日前
本田技研工業株式会社
コイルユニット
1か月前
本田技研工業株式会社
コイル成形部材
1か月前
本田技研工業株式会社
バッテリパック
1か月前
本田技研工業株式会社
バッテリパック
1か月前
本田技研工業株式会社
バッテリパック
1か月前
本田技研工業株式会社
非水電解質電池
15日前
本田技研工業株式会社
カメラの取付構造
15日前
本田技研工業株式会社
電池劣化推定装置
1か月前
本田技研工業株式会社
鞍乗り型電動車両
15日前
本田技研工業株式会社
鞍乗り型電動車両
23日前
本田技研工業株式会社
通話サポート装置
15日前
本田技研工業株式会社
鞍乗り型電動車両
1か月前
本田技研工業株式会社
セル電圧検出装置
1か月前
本田技研工業株式会社
車両電源システム
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ