TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025102484
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2023219950
出願日
2023-12-26
発明の名称
運転支援装置及び運転支援方法
出願人
本田技研工業株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
G08G
1/16 20060101AFI20250701BHJP(信号)
要約
【課題】自車両の運転支援を適切に行うために有利な技術を提供する。
【解決手段】運転支援装置は、自車両が他車両と衝突する可能性があるリスク位置を表すリスク位置情報を記憶する記憶部と、車車間通信によって周辺車両の車速、位置、走行軌跡及びヨーレートを表す周辺車両情報を取得する取得部と、自車両の車速、位置、走行軌跡及びヨーレートを表す自車両情報と、周辺車両情報とに基づいて衝突する可能性を予測する予測部と、予測結果に基づいて自車両の乗員に報知を行う報知部と、を備える。予測部は、自車両の進行方向の所定の距離以内にリスク位置が含まれない場合に、自車両の予測軌跡と周辺車両の予測軌跡を決定し、自車両の予測軌跡及び周辺車両の予測軌跡に基づいて自車両と周辺車両との接近状況を評価するための評価距離を決定し、評価距離が所定の範囲に含まれない場合に自車両と周辺車両とが衝突する可能性がないと予測する。
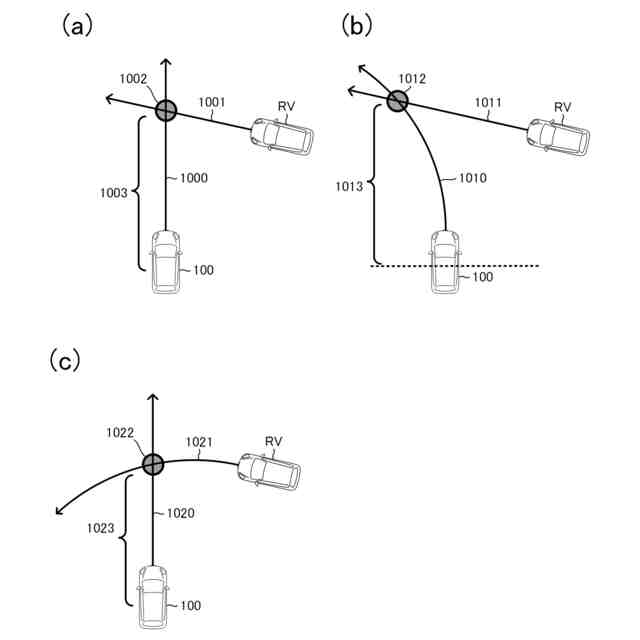
【選択図】図10
特許請求の範囲
【請求項1】
運転支援装置であって、
前記運転支援装置が搭載された自車両が他車両と衝突する可能性があるリスク位置を表すリスク位置情報を記憶する記憶手段と、
前記自車両の周囲に存在する周辺車両から、車車間通信によって、前記周辺車両の車速、位置、走行軌跡及びヨーレートを表す周辺車両情報を取得する取得手段と、
前記自車両の車速、位置、走行軌跡及びヨーレートを表す自車両情報と、前記周辺車両情報とに基づいて、前記自車両と前記周辺車両とが衝突する可能性を予測する予測手段と、
前記予測手段による予測結果に基づいて、前記自車両の乗員に報知を行う報知手段と、を備え、
前記予測手段は、前記自車両の進行方向の所定の距離以内に前記リスク位置が含まれない場合に、
前記自車両情報に基づいて前記自車両の予測軌跡を決定し、前記周辺車両情報に基づいて前記周辺車両の予測軌跡を決定し、
前記自車両の前記予測軌跡及び前記周辺車両の前記予測軌跡に基づいて、前記自車両と前記周辺車両との接近状況を評価するための評価距離を決定し、
前記評価距離が所定の範囲に含まれない場合に、前記自車両と前記周辺車両とが衝突する可能性がないと予測する、運転支援装置。
続きを表示(約 2,200 文字)
【請求項2】
前記予測手段は、
前記自車両の車速及び前記自車両のヨーレートに基づいて、前記自車両の前記予測軌跡の予測精度を決定し、
前記周辺車両の車速及び前記周辺車両のヨーレートに基づいて、前記周辺車両の前記予測軌跡の予測精度を決定し、
前記自車両の前記予測軌跡の前記予測精度と、前記自車両の前記予測軌跡の曲率半径と、前記周辺車両の前記予測軌跡の前記予測精度と、前記周辺車両の前記予測軌跡の曲率半径と、に基づいて、複数の決定方法の候補から、前記評価距離の決定方法を選択する、請求項1に記載の運転支援装置。
【請求項3】
前記予測手段は、前記自車両の前方の第1の範囲内に前記周辺車両が存在し、前記自車両の前記予測軌跡の前記予測精度が閾値精度以上である場合に、
前記自車両の前記予測軌跡の前記曲率半径が閾値半径以上であれば、前記自車両の直進軌跡と前記周辺車両との距離を前記評価距離として決定し、
前記自車両の前記予測軌跡の前記曲率半径が前記閾値半径未満であれば、前記自車両の前記予測軌跡と前記周辺車両との距離を前記評価距離として決定する、請求項2に記載の運転支援装置。
【請求項4】
前記予測手段は、前記自車両の前方の前記第1の範囲内に前記周辺車両が存在し、前記自車両の前記予測軌跡の前記予測精度が前記閾値精度未満であり、前記周辺車両の前記予測軌跡の前記予測精度が前記閾値精度以上である場合に、
前記周辺車両の前記予測軌跡の前記曲率半径が前記閾値半径以上であるならば、前記自車両の直進軌跡と前記周辺車両との距離を前記評価距離として決定し、
前記周辺車両の前記予測軌跡の前記曲率半径が前記閾値半径未満であるならば、前記周辺車両の前記予測軌跡と前記自車両との距離を前記評価距離として決定する、請求項3に記載の運転支援装置。
【請求項5】
前記予測手段は、前記自車両の前方の第1の範囲内に前記周辺車両が存在し、前記自車両の前記予測軌跡の前記予測精度が前記閾値精度未満であり、前記周辺車両の前記予測軌跡の前記予測精度が前記閾値精度未満である場合に、前記自車両と前記周辺車両とが衝突する可能性がないと予測する、請求項4に記載の運転支援装置。
【請求項6】
前記予測手段は、前記自車両の側方の第2の範囲内に前記周辺車両が存在する場合に、
前記自車両の前記予測軌跡の予測精度が閾値精度以上であり、前記自車両の前記予測軌跡の曲率半径が閾値半径以上であれば、前記自車両の直進軌跡と前記周辺車両の直進軌跡との交点を予測交点として決定し、
前記自車両の前記予測軌跡の前記予測精度が前記閾値精度以上であり、前記自車両の前記予測軌跡の前記曲率半径が前記閾値半径未満であれば、前記自車両の前記予測軌跡と前記周辺車両の直進軌跡との交点を予測交点として決定し、
前記自車両の前記予測軌跡の前記予測精度が前記閾値精度未満であり、前記周辺車両の前記予測軌跡の予測精度が前記閾値精度以上であり、前記周辺車両の前記予測軌跡の曲率半径が前記閾値半径以上であれば、前記自車両の直進軌跡と前記周辺車両の直進軌跡との交点を予測交点として決定し、
前記自車両の前記予測軌跡の前記予測精度が前記閾値精度未満であり、前記周辺車両の前記予測軌跡の前記予測精度が前記閾値精度以上であり、前記周辺車両の前記予測軌跡の前記曲率半径が前記閾値半径未満であれば、前記自車両の直進軌跡と前記周辺車両の前記予測軌跡との交点を予測交点として決定し、
前記予測交点と前記自車両の現在位置とに基づいて前記評価距離を決定する、請求項1に記載の運転支援装置。
【請求項7】
前記予測手段は、前記自車両の側方の前記第2の範囲内に前記周辺車両が存在し、前記自車両の前記予測軌跡の前記予測精度が前記閾値精度未満であり、前記周辺車両の前記予測軌跡の前記予測精度が前記閾値精度未満である場合に、前記自車両と前記周辺車両とが衝突する可能性がないと予測する、請求項6に記載の運転支援装置。
【請求項8】
前記予測手段は、前記自車両の側方の前記第2の範囲内に前記周辺車両が存在する場合に、
前記周辺車両情報に基づいて、前記周辺車両が前記予測交点に到着するまでの到達時間を決定し、
前記到達時間が第1の閾値時間以下である場合に、前記自車両と前記周辺車両とが衝突する可能性があると予測し、
前記第1の閾値時間は、前記周辺車両の車速に基づいて決定される、請求項7に記載の運転支援装置。
【請求項9】
前記予測手段は、
前記予測交点を所定の時間間隔で繰り返し決定し、
前記予測交点の位置の変化量が所定の閾値変化量以上である場合に、前記第1の閾値時間を大きくする、請求項8に記載の運転支援装置。
【請求項10】
前記予測手段は、
前記自車両の前方の第1の範囲内に前記周辺車両が存在するかどうかを所定の時間間隔で繰り返し判定し、
前記自車両の側方の第2の範囲内に前記周辺車両が存在するかどうかを所定の時間間隔で繰り返し判定する、請求項1に記載の運転支援装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、運転支援装置及び運転支援方法に関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
近年、交通参加者の中でも脆弱な立場にある人々にも配慮した持続可能な輸送システムへのアクセスを提供する取り組みが活発化している。この実現に向けて予防安全技術に関する研究開発を通して交通の安全性や利便性をより一層改善する研究開発に注力している。他車両(周辺車両)等との衝突を防止するための運転支援を、地図情報を使用せずに行う装置が知られている。特許文献1には、自車両の走行軌跡と他車両の走行軌跡とが交差した交差点の位置情報を記憶部に登録しておき、当該交差点を再び通過する際に自車両の運転支援を行う運転支援装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第7054636号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
運転支援装置は、自車両の走行軌跡及び他車両の走行軌跡に基づいて、自車両が他車両に衝突する可能性があるリスク位置を特定し、このリスク位置を運転支援に使用しうる。しかし、自車両の進行方向に実際には交差点がある場合であっても、その交差点をリスク位置として特定した後でないと、リスク位置を用いた運転支援を実行できない。本開示の一部の側面は、自車両の運転支援を適切に行うために有利な技術を提供することを目的とする。そして、延いては持続可能な輸送システムの発展に寄与するものである。
【課題を解決するための手段】
【0005】
一部の実施形態によれば、運転支援装置であって、前記運転支援装置が搭載された自車両が他車両と衝突する可能性があるリスク位置を表すリスク位置情報を記憶する記憶手段と、前記自車両の周囲に存在する周辺車両から、車車間通信によって、前記周辺車両の車速、位置、走行軌跡及びヨーレートを表す周辺車両情報を取得する取得手段と、前記自車両の車速、位置、走行軌跡及びヨーレートを表す自車両情報と、前記周辺車両情報とに基づいて、前記自車両と前記周辺車両とが衝突する可能性を予測する予測手段と、前記予測手段による予測結果に基づいて、前記自車両の乗員に報知を行う報知手段と、を備え、前記予測手段は、前記自車両の進行方向の所定の距離以内に前記リスク位置が含まれない場合に、前記自車両情報に基づいて前記自車両の予測軌跡を決定し、前記周辺車両情報に基づいて前記周辺車両の予測軌跡を決定し、前記自車両の前記予測軌跡及び前記周辺車両の前記予測軌跡に基づいて、前記自車両と前記周辺車両との接近状況を評価するための評価距離を決定し、前記評価距離が所定の範囲に含まれない場合に、前記自車両と前記周辺車両とが衝突する可能性がないと予測する、運転支援装置が提供される。
【発明の効果】
【0006】
一部の実施形態によれば、自車両の運転支援を適切に行うために有利な技術が提供される。
【図面の簡単な説明】
【0007】
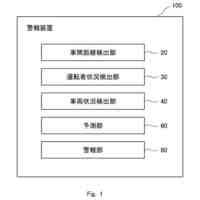
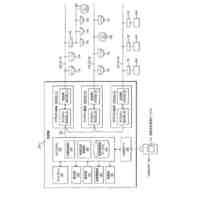
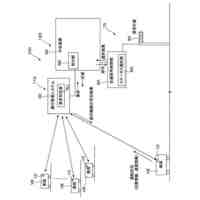
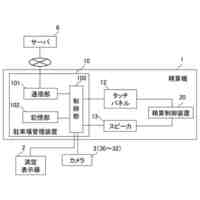
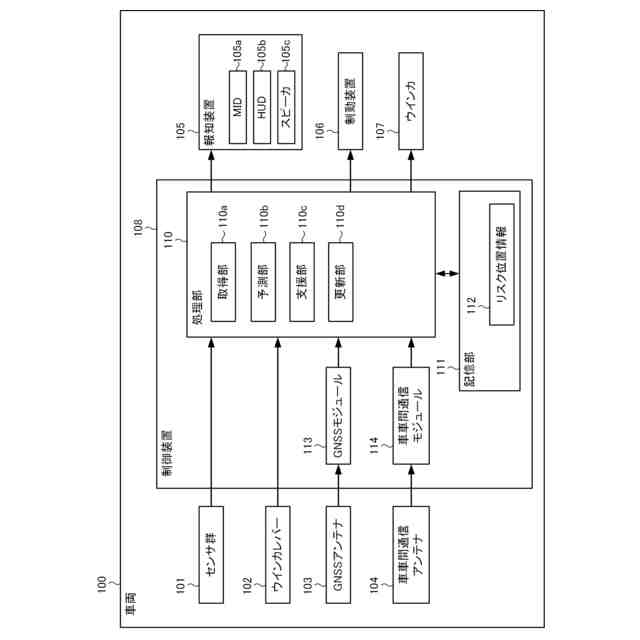
一部の実施形態に係る車両の構成例を説明するブロック図。
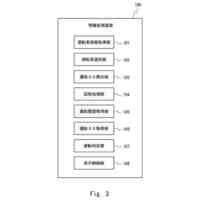
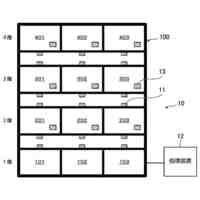
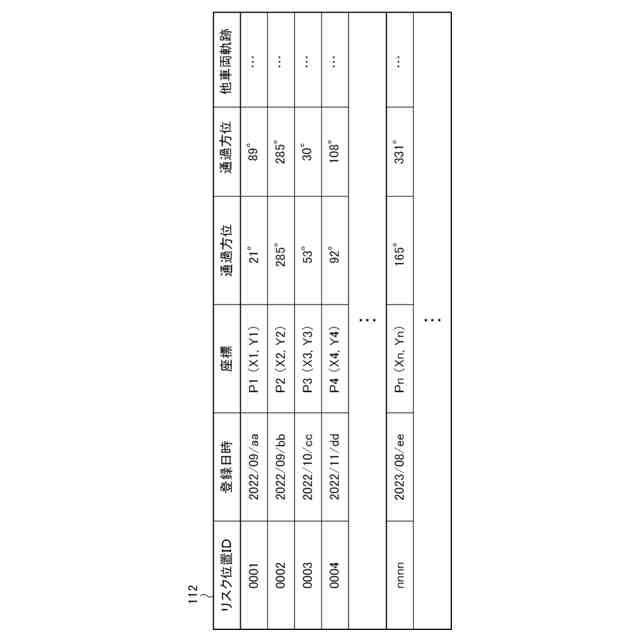
一部の実施形態に係るリスク位置情報の例を説明する図。
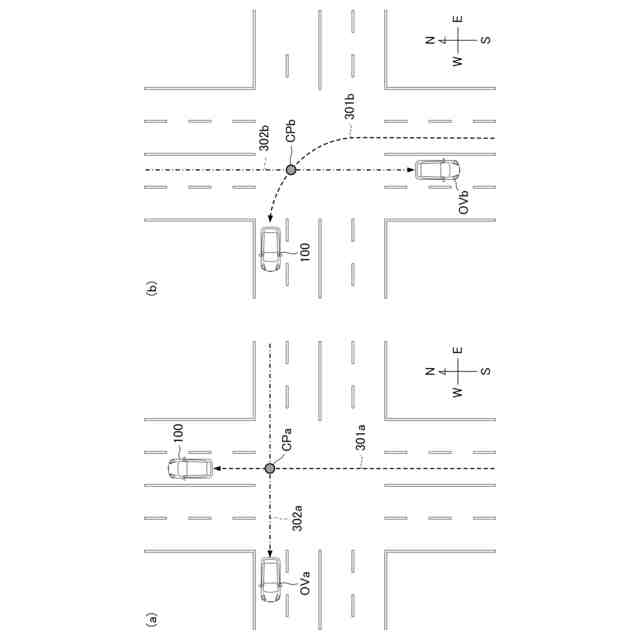
一部の実施形態に係る軌跡交点の例を説明する模式図。
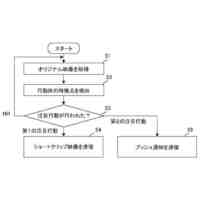
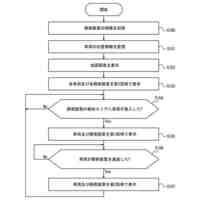
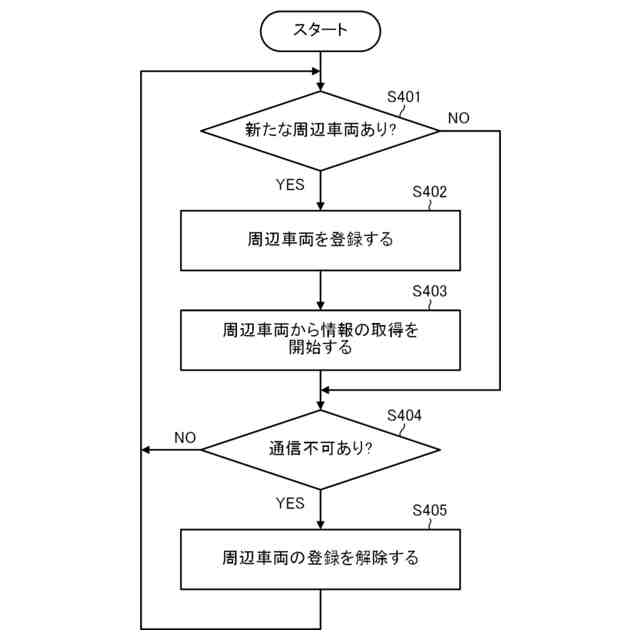
一部の実施形態に係る周辺車両の登録方法の例を説明するフロー図。
一部の実施形態に係るリスク位置の判定方法の例を説明するフロー図。
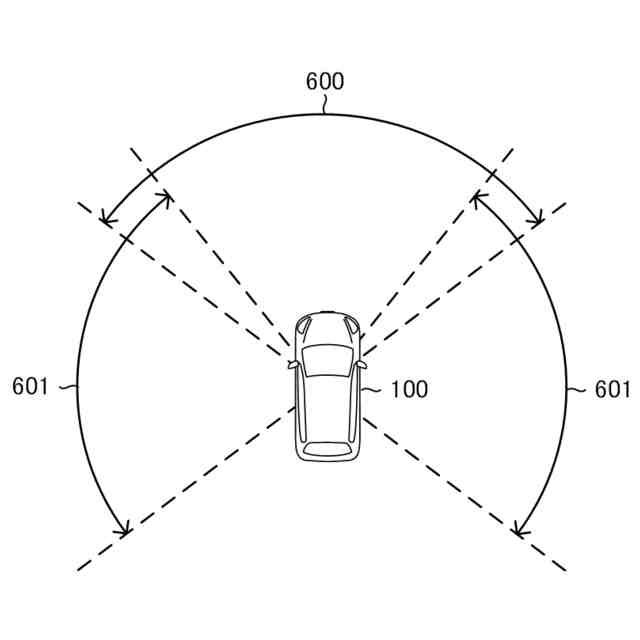
一部の実施形態に係る周辺車両が含まれる範囲の例を説明する模式図。
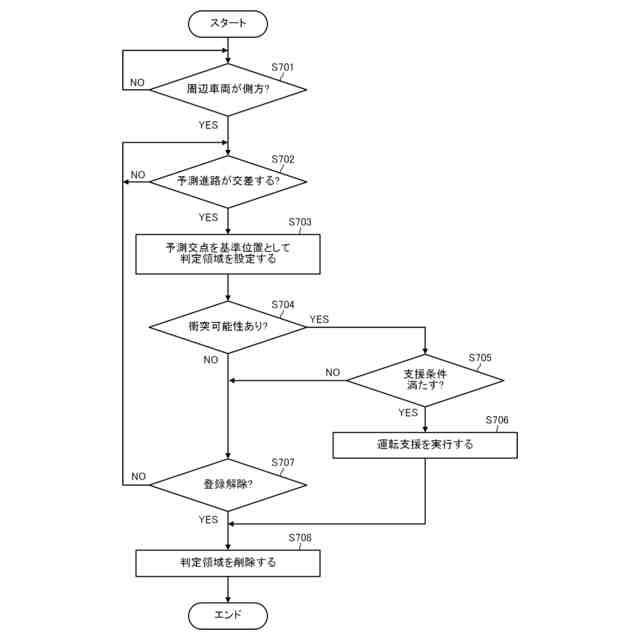
一部の実施形態に係る側方の周辺車両に関する運転支援動作の例を説明するフロー図。
一部の実施形態に係る側方の周辺車両に関する評価距離の決定動作の例を説明する模式図。
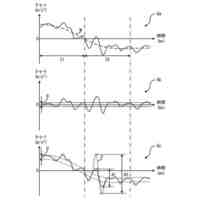
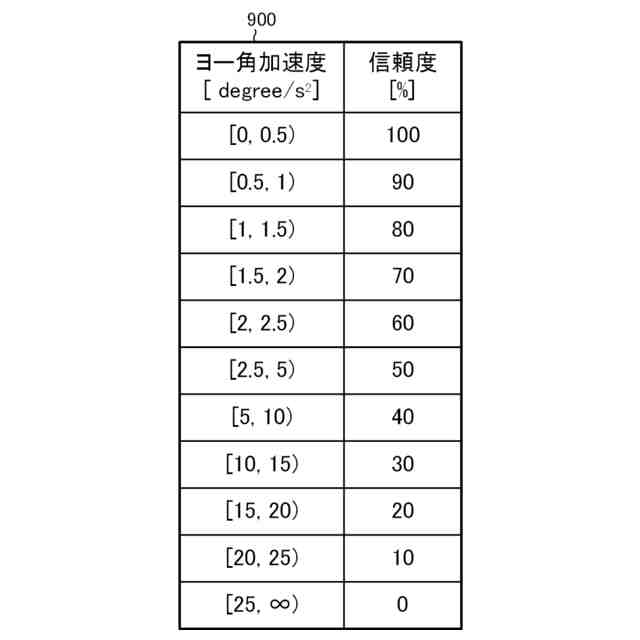
一部の実施形態に係るヨー角加速度と信頼度との対応表の例を説明する図。
一部の実施形態に係る側方の周辺車両に関する評価距離の決定動作の例を説明する模式図。
一部の実施形態に係る側方の周辺車両に関する運転支援動作の例を説明する模式図。
一部の実施形態に係る側方の周辺車両に関する運転支援動作の例を説明する模式図。
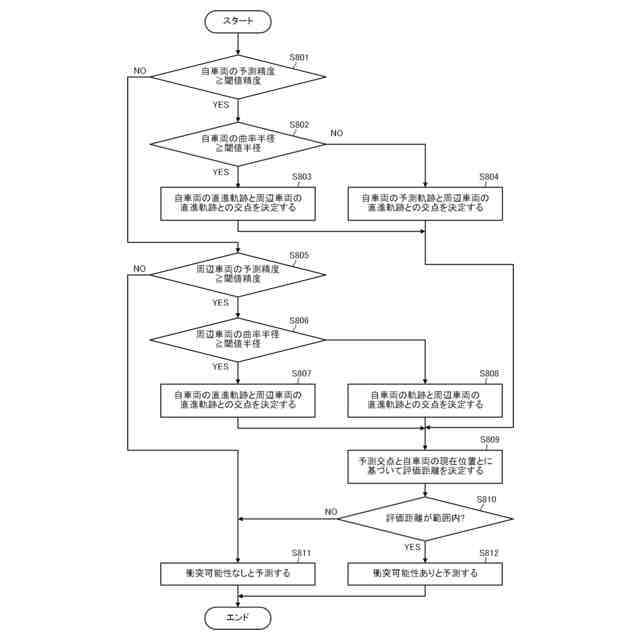
一部の実施形態に係る前方の周辺車両に関する運転支援動作の例を説明するフロー図。
一部の実施形態に係る前方の周辺車両に関する評価距離の決定動作の例を説明する模式図。
一部の実施形態に係る前方の周辺車両に関する評価距離の決定動作の例を説明する模式図。
一部の実施形態に係る前方の周辺車両に関する運転支援動作の例を説明する模式図。
一部の実施形態に係る判定対象の周辺車両の決定方法の例を説明する模式図。
一部の実施形態に係る報知方法の例を説明する模式図。
【発明を実施するための形態】
【0008】
以下、添付図面を参照して実施形態を詳しく説明する。なお、以下の実施形態は特許請求の範囲に係る発明を限定するものではなく、また実施形態で説明されている特徴の組み合わせの全てが発明に必須のものとは限らない。実施形態で説明されている複数の特徴のうち二つ以上の特徴は任意に組み合わされてもよい。また、同一若しくは同様の構成には同一の参照番号を付し、重複した説明は省略する。
【0009】
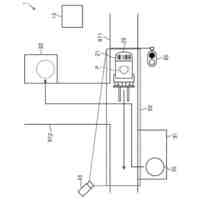
<車両の構成例>
図1を参照して、一部の実施形態に係る車両100の構成例について説明する。図1に示されるように、車両100は、センサ群101と、ウインカレバー102と、GNSS(Global Navigation Satellite System)アンテナ103と、車車間通信アンテナ104と、報知装置105と、制動装置106と、ウインカ107と、制御装置108とを含んでもよい。図1は、以下の説明において参照される構成要素を示すが、車両100は、車両として動作するための他の構成要素、例えば、駆動装置、トランスミッションなどを含んでもよい。これに加えて又はこれに代えて、車両100は、図1に示される構成要素の一部を含まなくてもよい。車両100は、四輪車であってもよいし、二輪車であってもよいし、他の形式の車両であってもよい。以下、車両100の運転者を単に運転者と表すことがある。
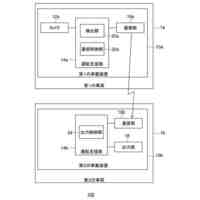
【0010】
制御装置108は、車両100の全体的な動作を制御する。後述するように、制御装置108は、制御装置108が搭載された車両100の運転支援を実行する。そのため、制御装置108は、運転支援装置と呼ばれてもよい。制御装置108によって提供される運転支援は、他の車両との衝突を防止(低減)するための衝突防止支援であってもよい。一部の実施形態において、制御装置108は、地図情報を用いずに衝突防止支援を実行可能である。以下の説明において、他の車両との区別を容易にするために、車両100を自車両100と表すことがある。また、車両100とは異なる車両を他車両と表すことがある。他車両のうち、現在において自車両100の周辺に存在する車両を周辺車両と表すことがある。周辺車両は、現在において自車両100と車車間通信が可能な車両のことであってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
路面投影装置
14日前
ニッタン株式会社
発信機
20日前
個人
防犯に特化したアプリケーション
22日前
ニッタン株式会社
発信機
9日前
ニッタン株式会社
発信機
2か月前
ニッタン株式会社
発信機
2か月前
東京都公立大学法人
液滴検出装置
22日前
TOA株式会社
拡声放送システム
13日前
株式会社JVCケンウッド
警報装置
8日前
個人
乗り物の移動を支援する方法及び装置
今日
日本信号株式会社
情報提供システム
7日前
株式会社アジラ
データ転送システム
13日前
日本信号株式会社
信号情報システム
7日前
アズビル株式会社
建物管理システム
1か月前
ホーチキ株式会社
異常報知設備
2か月前
ホーチキ株式会社
異常報知設備
1か月前
トヨタ自動車株式会社
回避動作判別装置
7日前
株式会社JVCケンウッド
情報処理装置
1か月前
日本信号株式会社
交通信号制御システム
7日前
ホーチキ株式会社
非常通報システム
1か月前
株式会社フィットネスワン
見守りシステム
2か月前
株式会社豊田自動織機
制御システム
13日前
トヨタ自動車株式会社
配車システム
2か月前
ホーチキ株式会社
火災検出システム
8日前
ユニティガードシステム株式会社
警備監視システム
1か月前
トヨタ自動車株式会社
障害物検知装置
29日前
Adora株式会社
アプリ使用制御システム
1か月前
大和ハウス工業株式会社
住環境管理設備
8日前
トヨタ自動車株式会社
方法
6日前
個人
注意喚起システム及び注意喚起装置
13日前
能美防災株式会社
火災感知器窓部清掃システム
27日前
シャープ株式会社
駐車場管理装置
1か月前
株式会社エイビット
工事観測システム
1か月前
トヨタ自動車株式会社
運転支援装置
8日前
株式会社アドヴィックス
走行支援システム
1か月前
トヨタ自動車株式会社
情報処理装置
20日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ