TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025101733
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2024214312
出願日
2024-12-09
発明の名称
制御装置、加工装置、制御方法、およびプログラム
出願人
NECプラットフォームズ株式会社
代理人
個人
主分類
B26D
5/00 20060101AFI20250630BHJP(切断手工具;切断;切断機)
要約
【課題】一律の動作で箱体を加工しつつ、寸法の小さい箱体の加工時間を短縮できる加工装置、加工方法、およびプログラムを提供する。
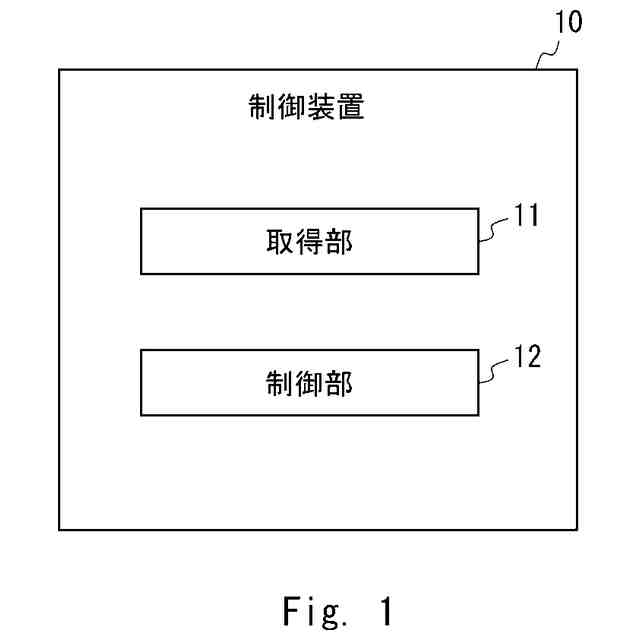
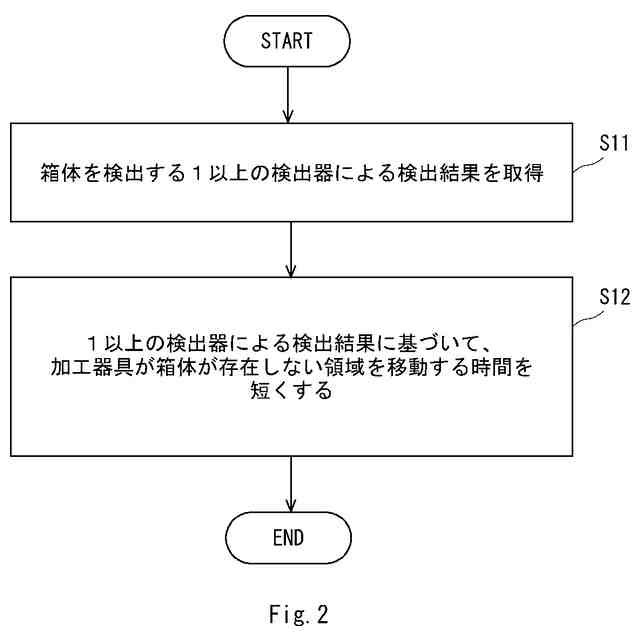
【解決手段】制御装置は、取得部および制御部を備える。取得部は、箱体を検出する1以上の検出器による検出結果を取得する。制御部は、加工開始地点から、箱体の4つの側面で構成される4つの角に含まれる1つの角の基準位置まで、1つの角を成す2つの半直線のうちの一方の延びる第1の方向の反対方向に加工器具を移動させ、基準位置から加工終了地点まで、2つの半直線のうちの他方の延びる第2の方向に加工器具を移動させる制御を行う。制御部は、検出器による検出結果に基づいて、加工器具が箱体が存在しない領域を移動する時間を短くする制御を行う。
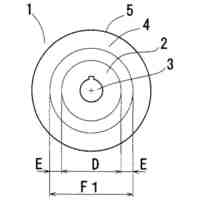
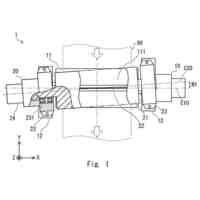
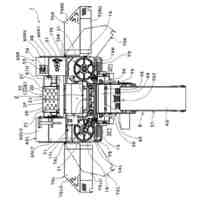
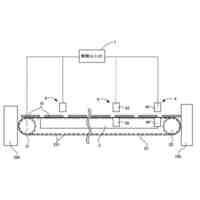
【選択図】図1
特許請求の範囲
【請求項1】
箱体を検出する1以上の検出器による検出結果を取得する取得部と、
加工開始地点から、箱体の4つの側面で構成される4つの角に含まれる1つの角の基準位置まで、前記1つの角を成す2つの半直線のうちの一方の延びる第1の方向の反対方向に加工器具を移動させ、前記基準位置から加工終了地点まで、前記2つの半直線のうちの他方の延びる第2の方向に前記加工器具を移動させる制御を行う制御部と
を備え、
前記制御部は、前記1以上の検出器による検出結果に基づいて、前記加工器具が前記箱体が存在しない領域を移動する時間を短くする制御を行う
制御装置。
続きを表示(約 1,900 文字)
【請求項2】
前記1以上の検出器は、前記加工器具の移動方向において前記加工器具の前側に配置されるように、前記加工器具に取り付けられている検出器を含む
請求項1に記載の制御装置。
【請求項3】
前記検出器は、前記第1の方向における第1の位置で前記箱体を検出する第1の検出器をさらに含み、
前記制御部は、
前記第1の検出器が前記箱体を検出しなかった場合、前記加工器具が、前記加工開始地点から前記第1の位置に対応する第1の地点まで移動する速度を第1の速度に設定し、前記第1の地点から、前記加工器具に取り付けられた前記検出器が前記箱体を検出し始める地点まで移動する速度を、前記第1の速度よりも遅い第2の速度に設定し、前記検出器が前記箱体を検出し始める地点から前記基準位置まで移動する速度を、前記第2の速度よりも遅い第3の速度に設定する
請求項2に記載の制御装置。
【請求項4】
前記検出器は、前記第1の方向における第1の位置で前記箱体を検出する第1の検出器と、前記第2の方向における第2の位置で前記箱体を検出する第2の検出器の少なくともいずれかを含み、
前記制御部は、
前記第1の検出器が前記箱体を検出しなかった場合、前記加工器具が前記加工開始地点から前記第1の位置に対応する第1の地点まで移動する時間を短くするための制御を行い、前記第2の検出器が前記箱体を検出しなかった場合、前記加工器具が前記第2の位置に対応する第2の地点から前記加工終了地点まで移動する時間を短くする
請求項1に記載の制御装置。
【請求項5】
前記検出器は、前記第1の検出器と前記第2の検出器の両方を含む
請求項4に記載の制御装置。
【請求項6】
前記制御部は、
前記第1の検出器が前記箱体を検出しなかった場合、前記加工器具が前記加工開始地点から前記第1の地点まで移動する速度を、前記加工器具が前記第1の地点から前記基準位置まで移動する速度より速くする
請求項5に記載の制御装置。
【請求項7】
前記制御部は、
前記第2の検出器が前記箱体を検出しなかった場合、前記加工終了地点を前記第2の地点に設定する
請求項6に記載の制御装置。
【請求項8】
加工器具が取り付けられたロボットアームと、
前記ロボットアームの動作を制御する制御装置と、
箱体を検出する1以上の検出器と
を備え、
前記制御装置は、
前記1以上の検出器による検出結果を取得する取得部と、
加工開始地点から、箱体の4つの側面で構成される4つの角に含まれる1つの角の基準位置まで、前記1つの角を成す2つの半直線のうちの一方の延びる第1の方向の反対方向に加工器具を移動させ、前記基準位置から加工終了地点まで、前記2つの半直線のうちの他方の延びる第2の方向に前記加工器具を移動させる制御を行う制御部と、
を備え、
前記制御部は、前記1以上の検出器による検出結果に基づいて、前記加工器具が前記箱体が存在しない領域を移動する時間を短くする制御を行う
加工装置。
【請求項9】
箱体を検出する1以上の検出器による検出結果を取得することと、
加工開始地点から、前記箱体の4つの側面で構成される4つの角に含まれる1つの角の基準位置まで、前記1つの角を成す2つの半直線のうちの一方の延びる第1の方向の反対方向に加工器具を移動させ、前記基準位置から加工終了地点まで、前記2つの半直線のうちの他方の延びる第2の方向に前記加工器具を移動させる制御を行うことと
を含み、
前記制御することは、前記1以上の検出器による検出結果に基づいて、前記加工器具が前記箱体が存在しない領域を移動する時間を短くする制御を行う
制御方法。
【請求項10】
箱体を検出する1以上の検出器による検出結果を取得することと、
加工開始地点から、前記箱体の4つの側面で構成される4つの角に含まれる1つの角の基準位置まで、前記1つの角を成す2つの半直線のうちの一方の延びる第1の方向の反対方向に加工器具を移動させ、前記基準位置から加工終了地点まで、前記2つの半直線のうちの他方の延びる第2の方向に前記加工器具を移動させる制御を行うことと
を含み、
前記制御することは、前記1以上の検出器による検出結果に基づいて、前記加工器具が前記箱体が存在しない領域を移動する時間を短くする制御を行う
制御方法をコンピュータに実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、箱体の加工に関する制御を行う制御装置、加工装置、制御方法、およびプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1に記載された装置は、箱体の寸法にかかわらず、一律の動作で箱体を加工することができる。
【先行技術文献】
【特許文献】
【0003】
特開2021-130174号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
関連技術には、寸法の小さい箱体を加工する時間を短縮する余地がある。
【0005】
本開示は、このような課題を解決するためになされたものであり、一律の動作で箱体を加工しつつ、寸法の小さい箱体の加工時間を短縮できる制御装置、加工装置、制御方法、およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の第1の態様にかかる制御装置は、
箱体を検出する1以上の検出器による検出結果を取得する取得部と、
加工開始地点から、箱体の4つの側面で構成される4つの角に含まれる1つの角の基準位置まで、前記1つの角を成す2つの半直線のうちの一方の延びる第1の方向の反対方向に加工器具を移動させ、前記基準位置から加工終了地点まで、前記2つの半直線のうちの他方の延びる第2の方向に前記加工器具を移動させる制御を行う制御部と
を備え、
前記制御部は、前記1以上の検出器による検出結果に基づいて、前記加工器具が前記箱体が存在しない領域を移動する時間を短くする制御を行う。
【0007】
本開示の第2の態様にかかる加工装置は、
加工器具が取り付けられたロボットアームと、
前記ロボットアームの動作を制御する制御装置と、
箱体を検出する1以上の検出器と
を備え、
前記制御装置は、
前記1以上の検出器による検出結果を取得する取得部と、
加工開始地点から、箱体の4つの側面で構成される4つの角に含まれる1つの角の基準位置まで、前記1つの角を成す2つの半直線のうちの一方の延びる第1の方向の反対方向に加工器具を移動させ、前記基準位置から加工終了地点まで、前記2つの半直線のうちの他方の延びる第2の方向に前記加工器具を移動させる制御を行う制御部と、
を備え、
前記制御部は、前記1以上の検出器による検出結果に基づいて、前記加工器具が前記箱体が存在しない領域を移動する時間を短くする制御を行う。
【0008】
本開示の第3の態様にかかる制御方法は、
箱体を検出する1以上の検出器による検出結果を取得することと、
加工開始地点から、前記箱体の4つの側面で構成される4つの角に含まれる1つの角の基準位置まで、前記1つの角を成す2つの半直線のうちの一方の延びる第1の方向の反対方向に加工器具を移動させ、前記基準位置から加工終了地点まで、前記2つの半直線のうちの他方の延びる第2の方向に前記加工器具を移動させる制御を行うことと
を含み、
前記制御することは、前記1以上の検出器による検出結果に基づいて、前記加工器具が前記箱体が存在しない領域を移動する時間を短くする制御を行う。
【0009】
本開示の第4の態様にかかるプログラムは、
箱体を検出する1以上の検出器による検出結果を取得することと、
加工開始地点から、前記箱体の4つの側面で構成される4つの角に含まれる1つの角の基準位置まで、前記1つの角を成す2つの半直線のうちの一方の延びる第1の方向の反対方向に加工器具を移動させ、前記基準位置から加工終了地点まで、前記2つの半直線のうちの他方の延びる第2の方向に前記加工器具を移動させる制御を行うことと
を含み、
前記制御することは、前記検出器による検出結果に基づいて、前記加工器具が前記箱体が存在しない領域を移動する時間を短くする制御を行う
制御方法をコンピュータに実行させる。
【発明の効果】
【0010】
本開示によれば、一律の動作で箱体を加工しつつ、寸法の小さい箱体の加工時間を短縮する制御装置、加工装置、制御方法、およびプログラムを実現できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
ハサミ
2か月前
個人
テープカッター
11か月前
個人
円弧状刃の包丁
5か月前
個人
理美容はさみ
2か月前
有限会社カルチエ
ナイフ
9か月前
個人
折り畳みナイフ
12か月前
株式会社サボテン
鋏
4か月前
個人
折り畳みナイフ
8か月前
個人
2wayコーナーパンチ
7か月前
個人
剃刀具
11か月前
コクヨ株式会社
ハサミ
9か月前
株式会社文創
切創抑制器具
9か月前
株式会社和田機械
栗切り機の刃物
1か月前
株式会社フタミ
表面処理装置
4か月前
やおき工業株式会社
鋏
2か月前
大創株式会社
打抜き部受支装置
9か月前
第一精工株式会社
ナイフ
11か月前
トヨタ自動車株式会社
切断装置
8か月前
デュプロ精工株式会社
加工装置
2か月前
株式会社日本キャリア工業
食料切断装置
4か月前
株式会社日本キャリア工業
食料切断装置
3か月前
株式会社日本キャリア工業
食料切断装置
3か月前
株式会社日本キャリア工業
食料切断装置
3か月前
船井電機株式会社
電動器具
1か月前
株式会社日本キャリア工業
食料切断装置
3か月前
株式会社日本キャリア工業
食料切断装置
7か月前
株式会社日本キャリア工業
食料切断装置
3か月前
独立行政法人 国立印刷局
打ち抜き装置
22日前
デュプロ精工株式会社
用紙積載装置
7か月前
オルファ株式会社
円形刃用のホルダ
12か月前
オルファ株式会社
円形刃用のホルダ
12か月前
鈴茂器工株式会社
棒状食材切断装置
6か月前
グンゼ株式会社
切断方法及び切断装置
11か月前
株式会社アストラ
果菜の分割裁断装置
11か月前
近畿刃物工業株式会社
切断加工用刃物
4か月前
近畿刃物工業株式会社
切断加工用刃物
4か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ