TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025097271
公報種別
公開特許公報(A)
公開日
2025-06-30
出願番号
2024137707
出願日
2024-08-19
発明の名称
土砂移動域推定方法、学習済みモデル、および土砂移動域推定装置
出願人
株式会社オリエンタルコンサルタンツ
,
学校法人加計学園
代理人
個人
主分類
G06T
7/00 20170101AFI20250623BHJP(計算;計数)
要約
【課題】土砂の移動域を高精度に推定すること。
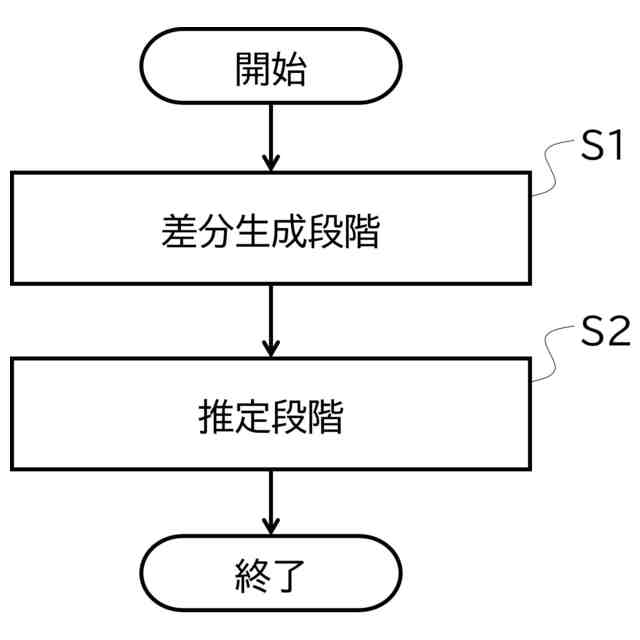
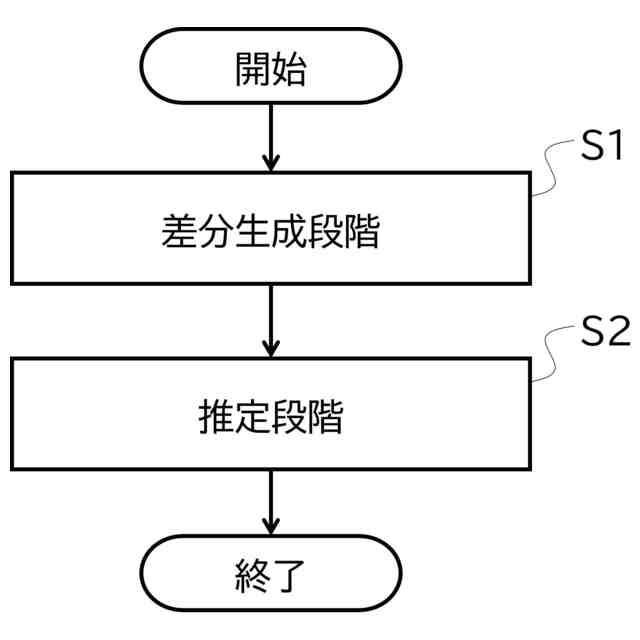
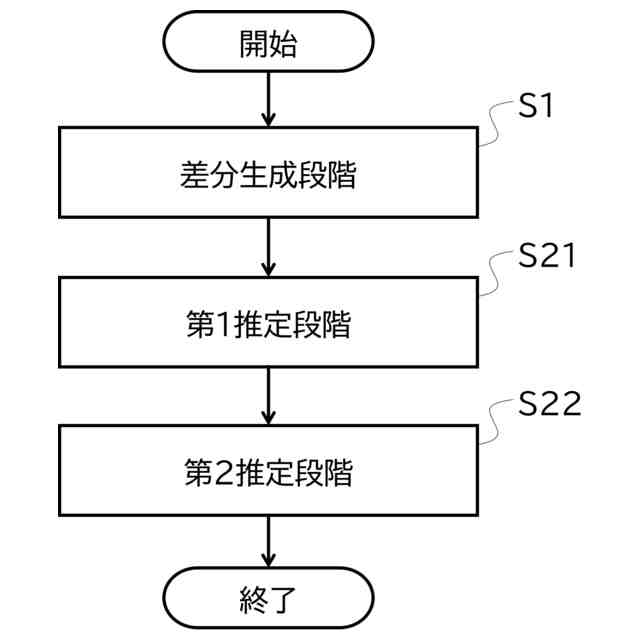
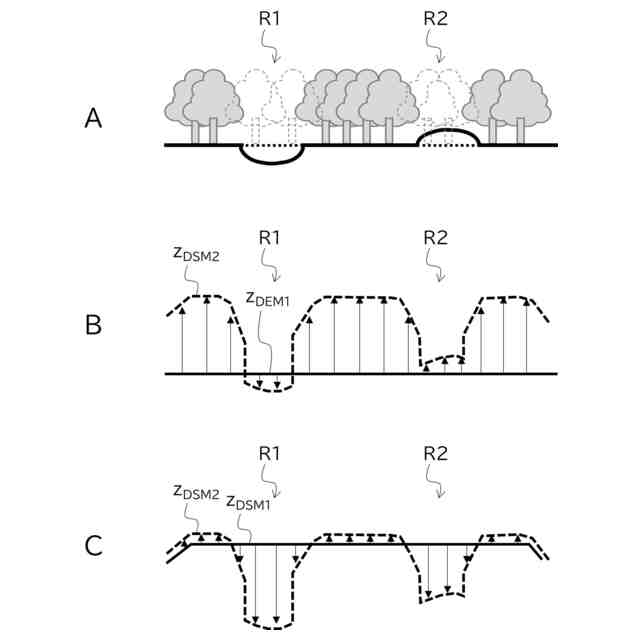
【解決手段】本発明は、コンピュータを利用して土砂の移動域を推定する土砂移動域推定方法であって、前記コンピュータが備えている演算部が、土砂災害前に計測された数値標高モデルおよび数値表層モデルのそれぞれと、土砂災害後に計測された数値表層モデルと、の差分により、差分情報を生成する差分生成段階と、前記演算部が、前記差分情報に基づいて、前記移動域を推定する推定段階と、を少なくとも含んでいる、土砂移動域推定方法を提供する。
【選択図】図1
特許請求の範囲
【請求項1】
コンピュータを利用して土砂の移動域を推定する土砂移動域推定方法であって、
前記コンピュータが備えている演算部が、土砂災害前に計測された数値標高モデルおよび数値表層モデルのそれぞれと、土砂災害後に計測された数値表層モデルと、の差分により、差分情報を生成する差分生成段階と、
前記演算部が、前記差分情報に基づいて、前記移動域を推定する推定段階と、を少なくとも含んでいる、土砂移動域推定方法。
続きを表示(約 1,400 文字)
【請求項2】
前記数値標高モデルおよび前記数値表層モデルのそれぞれは、航空レーザ測量またはUAVレーザ測量を用いて取得される、
請求項1に記載の土砂移動域推定方法。
【請求項3】
前記推定段階において、前記演算部が、前記差分情報を入力とし、土砂の移動域を出力とする機械学習を行うことで生成される学習済みモデルを用いて推定する、
請求項1または2に記載の土砂移動域推定方法。
【請求項4】
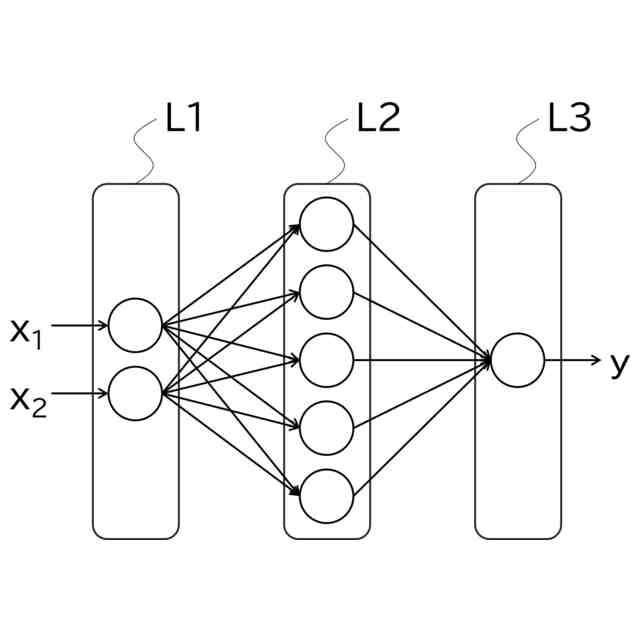
前記学習済みモデルが、ディープニューラルネットワーク(DNN)および畳み込みニューラルネットワーク(CNN)を含み、
前記推定段階が、第1推定段階および第2推定段階を含み、
前記第1推定段階において、前記演算部が、前記差分情報を前記DNNに入力して前記移動域を出力させ、
前記第2推定段階において、前記演算部が、前記差分情報および前記DNNの出力結果を前記CNNに入力して前記移動域を出力させる、
請求項3に記載の土砂移動域推定方法。
【請求項5】
前記DNNが、メッシュ単位で前記移動域を出力し、
前記CNNが、ピクセル単位で前記移動域を出力する、
請求項4に記載の土砂移動域推定方法。
【請求項6】
前記差分情報が、第1差分情報および第2差分情報を含み、
前記第1差分情報が、土砂災害前に計測された数値標高モデルと、土砂災害後に計測された数値表層モデルと、の差分により生成され、
前記第2差分情報が、土砂災害前に計測された数値表層モデルと、土砂災害後に計測された数値表層モデルと、の差分により生成される、
請求項4に記載の土砂移動域推定方法。
【請求項7】
前記第2推定段階において、前記演算部が、さらにMPI(Morphometric Protection Index)を前記CNNに入力して前記移動域を出力させる、
請求項6に記載の土砂移動域推定方法。
【請求項8】
入力層と、少なくとも一つの中間層と、出力層と、を備えるニューラルネットワークで構成されており、
土砂災害前に計測された数値標高モデルと、土砂災害後に計測された数値表層モデルと、の差分により生成した第1差分情報と、土砂災害前に計測された数値表層モデルと、土砂災害後に計測された数値表層モデルと、の差分により生成した第2差分情報と、を前記入力層に入力し、前記出力層から土砂の移動の有無を出力することにより、それぞれの層が有するノード間の重み付け係数が学習されており、
土砂災害前に計測された数値標高モデルおよび数値表層モデルのそれぞれと、土砂災害後に計測された数値表層モデルと、の差分により生成した差分情報に基づいて、学習済みの前記重み付け係数に基づく演算を行い、土砂の移動域を出力するよう、コンピュータを機能させるための学習済みモデル。
【請求項9】
土砂の移動域を推定する演算部を少なくとも備えており、
前記演算部が、
土砂災害前に計測された数値標高モデルおよび数値表層モデルのそれぞれと、土砂災害後に計測された数値表層モデルと、の差分により、差分情報を生成する差分生成段階と、
前記差分情報に基づいて、前記移動域を推定する推定段階と、を少なくとも行う、土砂移動域推定装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、土砂の移動域を推定する土砂移動域推定方法、学習済みモデル、および土砂移動域推定装置に関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
従来、大規模な土砂災害が発生した後には、災害全貌の把握や復旧計画の立案などのために、移動した土砂量を迅速に算出することが求められる。たとえば特許文献1では、航空写真画像データを正射投影に変換したオルソ画像データを用いて、移動土砂量を推定する技術が開示されている。この特許文献では、オルソ画像データに基づいて三次元メッシュデータ(土砂の移動域を示す地形データ)を作成し、移動土砂量を推定する技術について説明されている。
【先行技術文献】
【特許文献】
【0003】
特開2011-14151号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、オルソ画像データは天候や季節などに影響される。そのため、土砂の移動域の推定精度が低下するおそれがある。
【0005】
そこで、本発明は、土砂の移動域を高精度に推定する土砂移動域推定方法、学習済みモデル、および土砂移動域推定装置を提供することを主目的とする。
【課題を解決するための手段】
【0006】
本発明は、
コンピュータを利用して土砂の移動域を推定する土砂移動域推定方法であって、
前記コンピュータが備えている演算部が、土砂災害前に計測された数値標高モデルおよび数値表層モデルのそれぞれと、土砂災害後に計測された数値表層モデルと、の差分により、差分情報を生成する差分生成段階と、
前記演算部が、前記差分情報に基づいて、前記移動域を推定する推定段階と、を少なくとも含んでいる、土砂移動域推定方法を提供する。
前記数値標高モデルおよび前記数値表層モデルのそれぞれは、航空レーザ測量またはUAVレーザ測量を用いて取得されてよい。
前記推定段階において、前記演算部が、前記差分情報を入力とし、土砂の移動域を出力とする機械学習を行うことで生成される学習済みモデルを用いて推定してよい。
前記学習済みモデルが、ディープニューラルネットワーク(DNN)および畳み込みニューラルネットワーク(CNN)を含み、
前記推定段階が、第1推定段階および第2推定段階を含み、
前記第1推定段階において、前記演算部が、前記差分情報を前記DNNに入力して前記移動域を出力させ、
前記第2推定段階において、前記演算部が、前記差分情報および前記DNNの出力結果を前記CNNに入力して前記移動域を出力させてよい。
前記DNNが、メッシュ単位で前記移動域を出力し、
前記CNNが、ピクセル単位で前記移動域を出力してよい。
前記差分情報が、第1差分情報および第2差分情報を含み、
前記第1差分情報が、土砂災害前に計測された数値標高モデルと、土砂災害後に計測された数値表層モデルと、の差分により生成され、
前記第2差分情報が、土砂災害前に計測された数値表層モデルと、土砂災害後に計測された数値表層モデルと、の差分により生成されてよい。
前記第2推定段階において、前記演算部が、さらにMPI(Morphometric Protection Index)を前記CNNに入力して前記移動域を出力させてよい。
また、本発明は、
少なくとも一つの入力層と、少なくとも一つの中間層と、少なくとも一つの出力層と、を備えるニューラルネットワークで構成されており、
土砂災害前に計測された数値標高モデルと、土砂災害後に計測された数値表層モデルと、の差分により生成した第1差分情報と、土砂災害前に計測された数値表層モデルと、土砂災害後に計測された数値表層モデルと、の差分により生成した第2差分情報と、を前記入力層に入力し、前記出力層から土砂の移動の有無を出力することにより、それぞれの層が有するノード間の重み付け係数が学習されており、
土砂災害前に計測された数値標高モデルおよび数値表層モデルのそれぞれと、土砂災害後に計測された数値表層モデルと、の差分により生成した差分情報に基づいて、学習済みの前記重み付け係数に基づく演算を行い、土砂の移動域を出力するよう、コンピュータを機能させるための学習済みモデルを提供する。
また、本発明は、
土砂の移動域を推定する演算部を少なくとも備えており、
前記演算部が、
土砂災害前に計測された数値標高モデルおよび数値表層モデルのそれぞれと、土砂災害後に計測された数値表層モデルと、の差分により、差分情報を生成する差分生成段階と、
前記差分情報に基づいて、前記移動域を推定する推定段階と、を少なくとも行う、土砂移動域推定装置を提供する。
【発明の効果】
【0007】
本発明によれば、土砂の移動域を高精度に推定する土砂移動域推定方法、学習済みモデル、および土砂移動域推定装置を提供できる。なお、本明細書中に記載した効果はあくまで例示であって限定されるものではなく、また他の効果があってもよい。
【図面の簡単な説明】
【0008】
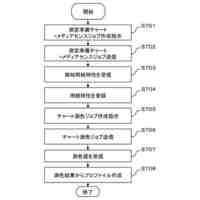
本発明の一実施形態に係る土砂移動域推定方法の一例を示すフローチャートである。
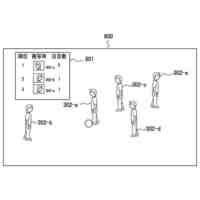
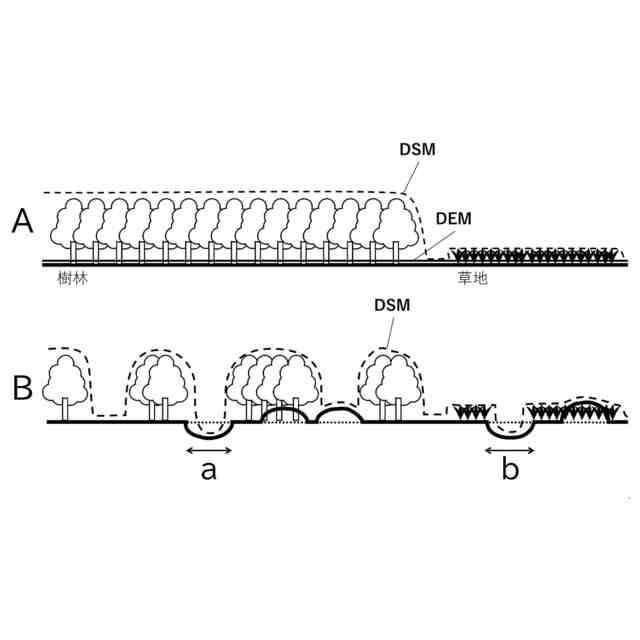
本発明の一実施形態に係る土砂移動域推定方法を説明する模式図である。
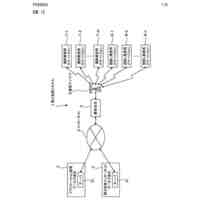
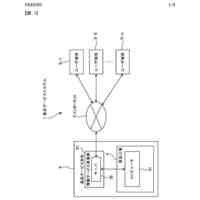
本発明の一実施形態に係る学習済みモデルの構成例を示す模式図である。
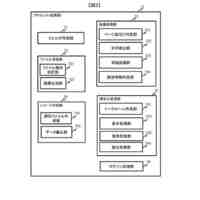
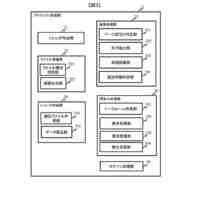
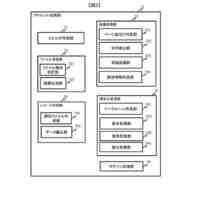
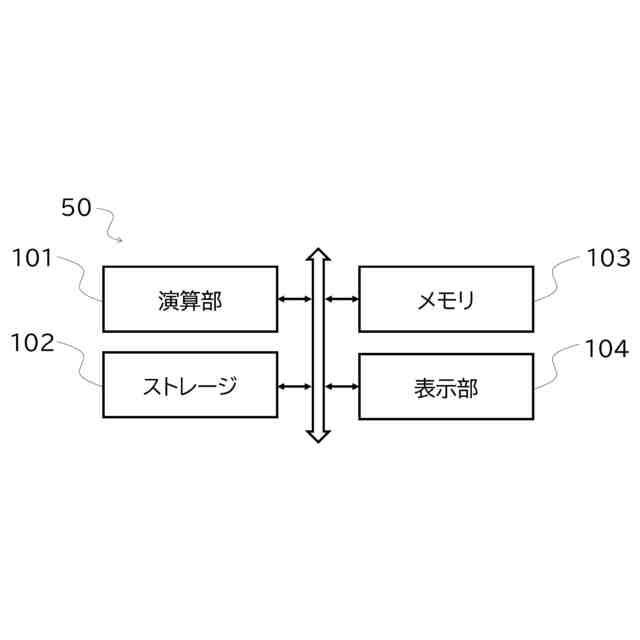
本発明の一実施形態に係る土砂移動域推定方法が利用するコンピュータ(土砂移動域推定装置)50の構成例を示すブロック図である。
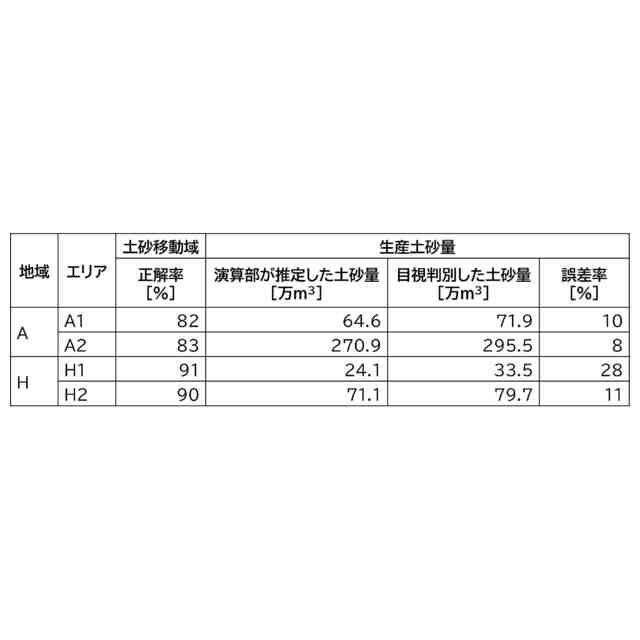
本発明の一実施形態に係る学習済みモデルの評価結果を示す表である。
本発明の一実施形態に係る土砂移動域推定方法の一例を示すフローチャートである。
本発明の一実施形態に係る土砂移動域推定方法を説明する模式図である。
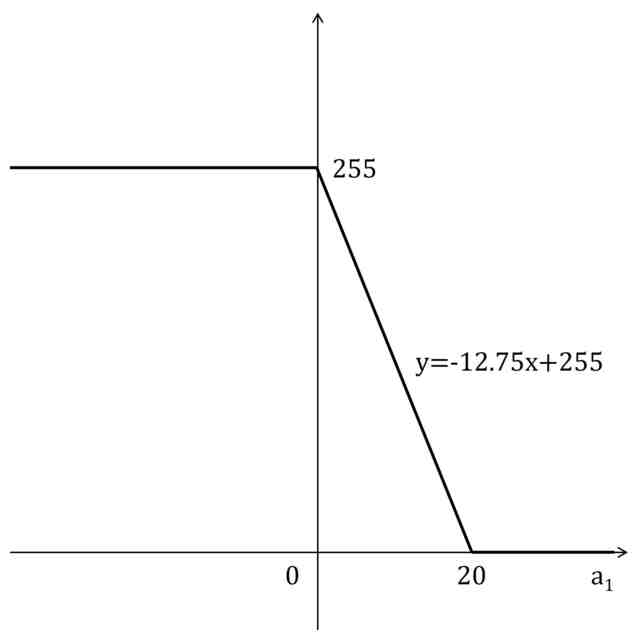
本発明に係る第1差分情報a
1
からグレースケール画像への変換方法の例を示すグラフである。
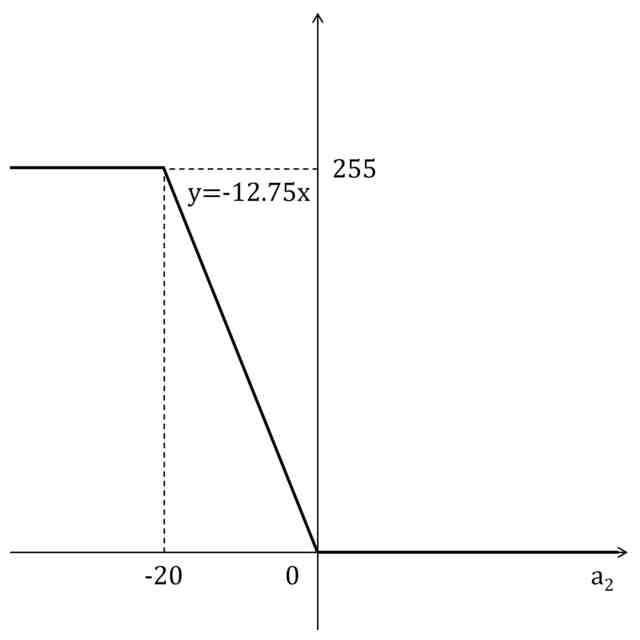
本発明に係る第2差分情報a
2
からグレースケール画像への変換方法の例を示すグラフである。
本発明に係るMPIの計算手順の例を示すフローチャートである。
本発明に係るMPIからグレースケール画像への変換方法の例を示すグラフである。
本発明の一実施形態に係る学習済みモデルの評価における混同行列を示す表である。
本発明の一実施形態に係る学習済みモデルの評価結果を示す表である。
本発明の一実施形態に係る土砂移動域推定方法の推定結果の例を示す画像である。
本発明の一実施形態に係る土砂移動域推定方法の推定結果の例を示す画像である。
【発明を実施するための形態】
【0009】
以下、本発明を実施するための好適な形態について説明する。以下に説明する実施形態は、本発明の代表的な実施形態の一例を示したものであり、これにより本発明の範囲が狭く解釈されることはない。なお、特に断りがない限り、図面において、「上」とは図中の上方向または上側を意味し、「下」とは、図中の下方向または下側を意味し、「左」とは図中の左方向または左側を意味し、「右」とは図中の右方向または右側を意味する。また、図面については、同一または同等の要素または部材には同一の符号を付し、重複する説明は省略する。
【0010】
本発明の説明は以下の順序で行う。
1.本発明に係る第1の実施形態(土砂移動域推定方法の例1)
(1)航空レーザ測量またはUAVレーザ測量
(2)本発明の概要
(3)学習済みモデル
(4)ハードウェア構成
(5)評価結果
2.本発明に係る第2の実施形態(土砂移動域推定方法の例2)
(1)技術内容
(2)評価結果
3.本発明に係る第3の実施形態(土砂移動域推定装置)
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
詐欺保険
1か月前
個人
縁伊達ポイン
1か月前
個人
職業自動販売機
7日前
個人
5掛けポイント
14日前
個人
RFタグシート
25日前
個人
ペルソナ認証方式
22日前
個人
QRコードの彩色
1か月前
個人
地球保全システム
1か月前
個人
情報処理装置
17日前
個人
自動調理装置
24日前
個人
残土処理システム
1か月前
個人
農作物用途分配システム
1か月前
個人
タッチパネル操作指代替具
1か月前
個人
知的財産出願支援システム
1か月前
個人
サービス情報提供システム
9日前
個人
インターネットの利用構造
21日前
個人
携帯端末障害問合せシステム
1か月前
個人
スケジュール調整プログラム
1か月前
株式会社キーエンス
受発注システム
1か月前
個人
エリアガイドナビAIシステム
22日前
個人
食品レシピ生成システム
1か月前
株式会社キーエンス
受発注システム
1か月前
株式会社キーエンス
受発注システム
1か月前
キヤノン株式会社
印刷システム
1か月前
キヤノン株式会社
情報処理装置
1日前
キヤノン株式会社
情報処理装置
1日前
エッグス株式会社
情報処理装置
1か月前
キヤノン株式会社
表示システム
1か月前
個人
音声・通知・再配達UX制御構造
1か月前
個人
帳票自動生成型SaaSシステム
1か月前
キヤノン株式会社
情報処理装置
15日前
トヨタ自動車株式会社
通知装置
28日前
キヤノン株式会社
画像認識装置
1日前
株式会社ケアコム
項目選択装置
17日前
株式会社ケアコム
項目選択装置
17日前
株式会社ワコム
電子ペン
16日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ