TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025097264
公報種別
公開特許公報(A)
公開日
2025-06-30
出願番号
2024113850
出願日
2024-07-17
発明の名称
経路探索方法、経路探索装置および搬送システム
出願人
セメス株式会社
,
SEMES CO., LTD.
代理人
IBC一番町弁理士法人
主分類
G05D
1/644 20240101AFI20250623BHJP(制御;調整)
要約
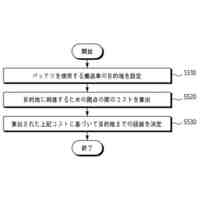
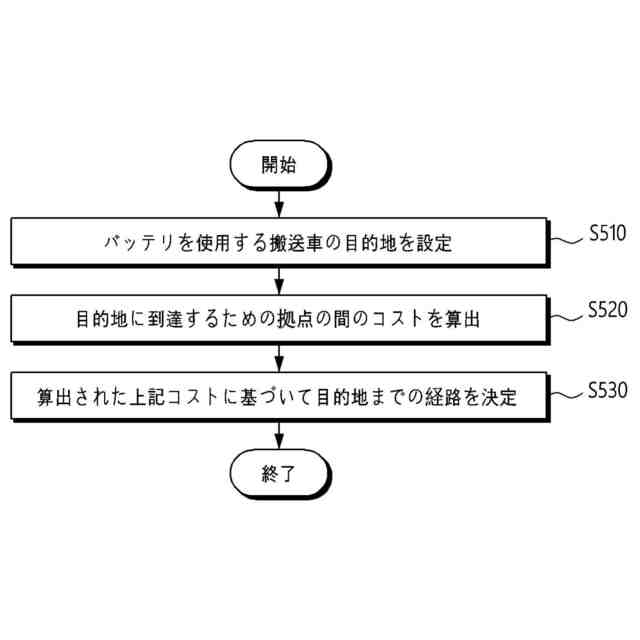
【課題】バッテリを備えた搬送車の最適経路を決定できる経路探索方法が提供される。
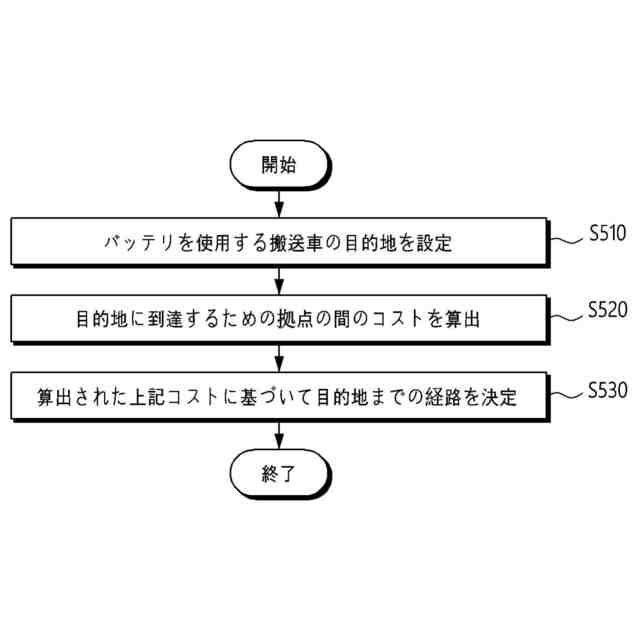
【解決手段】経路探索方法は、バッテリを使用する搬送車の目的地を設定し、前記目的地に到達するための拠点の間のコストを算出し、前記コストを算出するためのコスト関数の入力変数は拠点の間で発生する充放電量を含み、算出された前記コストに基づいて、前記目的地までの経路を決定することを含む。
【選択図】図7
特許請求の範囲
【請求項1】
バッテリを使用する搬送車の目的地を設定し、
前記目的地に到達するための拠点の間のコストを算出し、前記コストを算出するためのコスト関数の入力変数は拠点の間で発生する充放電量を含み、
算出された前記コストに基づいて、前記目的地までの経路を決定することを含む、経路探索方法。
続きを表示(約 980 文字)
【請求項2】
前記コスト関数の入力変数は、拠点の間の距離と、拠点の間の渋滞度をさらに含む、請求項1に記載の経路探索方法。
【請求項3】
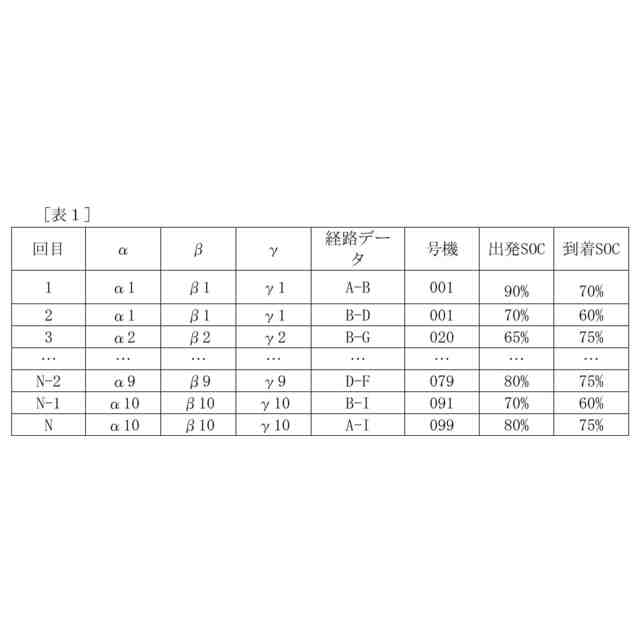
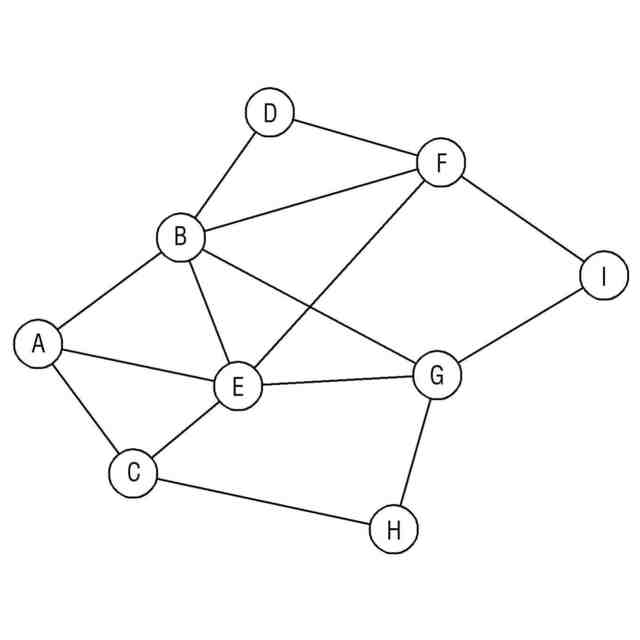
第1拠点(A)と第2拠点(B)の間の前記コスト関数は、cost(A,B)=α×(距離)+β×(渋滞度)+γ×(充放電量)であり、
前記αは距離変数に対する加重値であり、βは渋滞度変数に対する加重値であり、γは充放電量変数に対する加重値である、請求項2に記載の経路探索方法。
【請求項4】
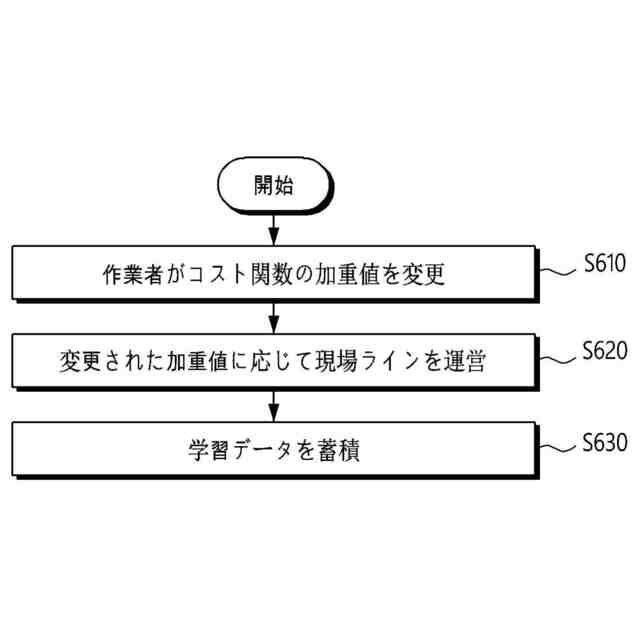
前記コスト関数の加重値は、前記搬送車のバッテリの残量(SoC,State of Charge)をターゲット残量として維持するようにするマシンラーニング方法により決定された、請求項3に記載の経路探索方法。
【請求項5】
前記コスト関数の加重値は、前記搬送車の搬送時間を最小化し、かつ前記搬送車の残量を最大にするようにするマシンラーニング方法により決定された、請求項3に記載の経路探索方法。
【請求項6】
前記コスト関数を学習させるための学習データは、作業者がラインを運営する際に入力した加重値を含む、請求項1に記載の経路探索方法。
【請求項7】
前記コスト関数を学習させるための学習データは、シミュレーションによりランダムに変更された加重値を含む、請求項1に記載の経路探索方法。
【請求項8】
前記搬送車はレールに沿って移動し、
前記レールは電力を供給するパワーラインが設置された給電区間と、前記パワーラインが設置されていない非給電区間を含む、請求項1に記載の経路探索方法。
【請求項9】
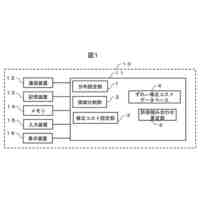
バッテリを使用する搬送車の目的地を設定する目的地設定部;
前記目的地に到達するための拠点の間のコストを算出し、前記コストを算出するためのコスト関数の入力変数は拠点の間で発生する充放電量を含むコスト算出部;および
算出された前記コストに基づいて、前記目的地までの経路を決定する経路決定部を含む、経路探索装置。
【請求項10】
前記コスト関数の入力変数は、拠点の間の距離と、拠点の間の渋滞度をさらに含む、請求項9に記載の経路探索装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は経路探索方法、経路探索装置および搬送システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
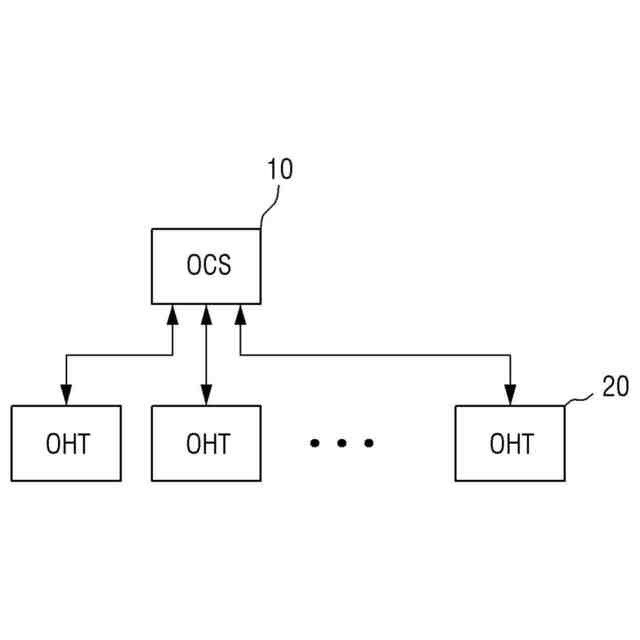
半導体装置の製造工程において、基板は無人搬送システムにより移送されることができる。特に、無人搬送システムは、クリーンルームの天井または床に設置された走行レールに沿って移動可能なように構成された搬送車(例えば、OHT(Overhead Hoist Transport)、RGV(Rail Guided Vehicle)など)を含むことができる。搬送車の運行制御はOCS(OHT Control Server)装置のような上位コントローラにより制御することができる。
【発明の概要】
【発明が解決しようとする課題】
【0003】
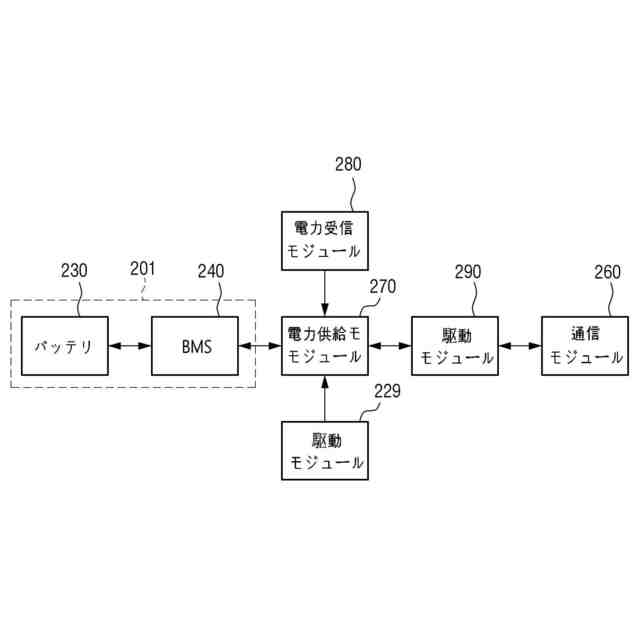
搬送車は走行レールに設置されたパワーラインを通じて電力の供給を受けて移動することができる。搬送車は内部にバッテリを備えてパワーラインが設置されていない走行レールを移動するとき、バッテリに貯蔵されたエネルギを使用して移動することができる。
【0004】
本発明が解決しようとする課題は、バッテリを備えた搬送車の最適経路を決定できる経路探索方法を提供することにある。
【0005】
本発明が解決しようとする課題は、バッテリを備えた搬送車の最適経路を決定できる経路探索装置を提供することにある。
【0006】
本発明が解決しようとする課題は、バッテリを備えた搬送車の最適経路を決定できる搬送システムを提供することにある。
【0007】
本発明の課題は以上で言及した課題に制限されず、言及されていないまた他の課題は以下の記載から当業者に明確に理解されるものである。
【課題を解決するための手段】
【0008】
前記課題を達成するための本発明のいくつかの実施形態による経路探索方法は、バッテリを使用する搬送車の目的地を設定し、前記目的地に到達するための拠点の間のコストを算出し、前記コストを算出するためのコスト関数の入力変数は拠点の間で発生する充放電量を含み、算出された前記コストに基づいて、前記目的地までの経路を決定することを含む。
【0009】
前記他の課題を達成するための本発明のいくつかの実施形態による経路探索装置は、バッテリを使用する搬送車の目的地を設定する目的地設定部;前記目的地に到達するための拠点の間のコストを算出し、前記コストを算出するためのコスト関数の入力変数は拠点の間で発生する充放電量を含むコスト算出部;および算出された前記コストに基づいて、前記目的地までの経路を決定する経路決定部を含む。
【0010】
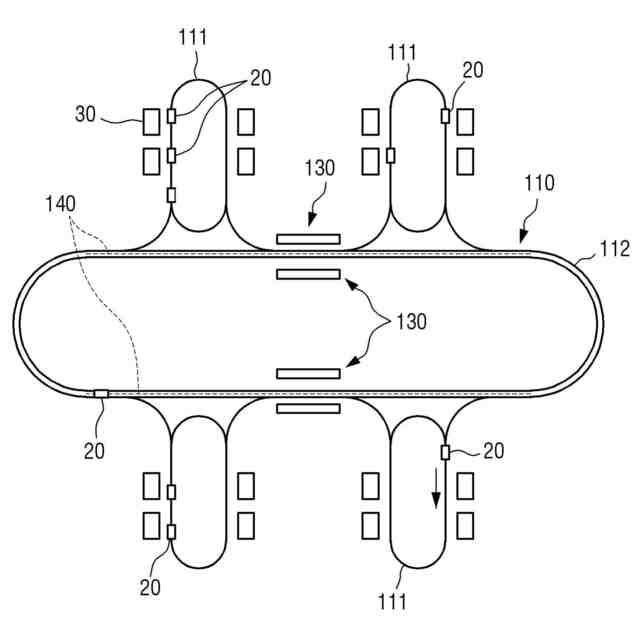
前記また他の課題を達成するための本発明のいくつかの実施形態による搬送システムは、電力を供給するパワーラインが設置された給電区間と、前記パワーラインが設置されていない非給電区間を含むレール;前記レールに沿って移動し、前記パワーラインを通じて供給された電力を貯蔵するバッテリを備えた搬送車;および前記複数の搬送車を制御する上位コントローラを含み、前記上位コントローラは前記搬送車の目的地を設定し、前記目的地に到達するための拠点の間のコストを算出し、前記コストを算出するためのコスト関数の入力変数は拠点の間で発生する充放電量を含み、算出された前記コストに基づいて、前記目的地までの経路を決定する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
セメス株式会社
経路探索方法、経路探索装置および搬送システム
7日前
株式会社FUJI
工作機械
13日前
株式会社ダイヘン
移動体
18日前
ローム株式会社
半導体集積回路
28日前
三栄ハイテックス株式会社
基準電圧回路
1か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ペダル機構
1か月前
株式会社ダイフク
搬送設備
13日前
株式会社鷺宮製作所
制御装置
12日前
株式会社オプトン
制御プログラム生成装置
11日前
三菱電機株式会社
自己位置推定装置
1か月前
株式会社ダイヘン
負荷時タップ切換器
18日前
株式会社ダイフク
物品搬送設備
11日前
株式会社ダイフク
物品搬送設備
11日前
株式会社ダイフク
物品搬送設備
27日前
トヨタ自動車株式会社
移動体、及び制御方法
1か月前
株式会社ダイフク
物品搬送設備
4日前
株式会社戸張空調
アクセル・ブレーキ操作装置
24日前
株式会社タブチ
減圧弁
2か月前
オムロン株式会社
安全装置
11日前
WHILL株式会社
電動モビリティ
1か月前
シンフォニアテクノロジー株式会社
異常検知装置
11日前
株式会社計数技研
移動体、及びプログラム
1か月前
ローム株式会社
半導体装置
1か月前
株式会社ダイフク
飛行体制御システム
今日
株式会社ダイヘン
搬送車
1か月前
日本信号株式会社
自走式装置
2か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社デンソー
診断装置
2か月前
株式会社日立製作所
製造工程管理システム
12日前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社アイシン
自律移動体
2か月前
株式会社FUJI
工作機械
14日前
FCLコンポーネント株式会社
電源回路および検出装置
2か月前
株式会社アイシン
自律移動体
2か月前
株式会社豊田自動織機
無人搬送車両
21日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ