TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025092143
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2023207836
出願日
2023-12-08
発明の名称
モータ制御方法及びモータ制御装置
出願人
日産自動車株式会社
代理人
弁理士法人後藤特許事務所
主分類
H02P
21/26 20160101AFI20250612BHJP(電力の発電,変換,配電)
要約
【課題】重畳させる高周波信号の周波数を可変としても、磁極位置の推定精度及びモータの制御安定性を確保することのできるセンサレス制御を実現する。
【解決手段】
基本電力指令値に高周波信号を重畳して電力指令値を定め、電流検出値i
d_det
,i
q_det
に基づいてモータ200の磁極位置θを推定し、推定した磁極位置θ及び電力指令値に基づいてモータ200を制御するモータ制御方法において、複数の周波数成分を含む高周波信号を電力指令値に重畳し、上記応答電流の強度がピークとなるピーク周波数f
k
を算出し、電流検出値から最大ピーク周波数f
max
に対応する高周波電流成分を抽出して、抽出した高周波電流成分に基づいて磁極位置θを推定し、電流検出値から高周波電流成分を除去した補正電流検出値i´
d_det
,i´
q_det
を算出し、補正電流検出値に基づいて基本電力指令値を算出する。
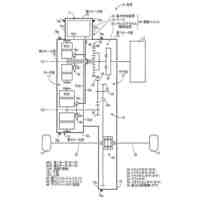
【選択図】図1
特許請求の範囲
【請求項1】
所定の基本電力指令値に高周波信号を重畳して電力指令値を定め、前記電力指令値の入力に対する応答電流を検出し、得られた電流検出値に基づいてモータの磁極位置を推定し、推定した前記磁極位置及び前記電力指令値に基づいて前記モータを制御するモータ制御方法であって、
複数の周波数成分を含む前記高周波信号を前記基本電力指令値に重畳し、
前記応答電流の強度がピークとなる周波数を表すピーク周波数を算出し、
前記電流検出値から前記ピーク周波数に対応する高周波電流成分を抽出して、抽出した前記高周波電流成分に基づいて前記磁極位置を推定し、
前記電流検出値から前記高周波電流成分を除去した補正電流検出値を算出し、
前記補正電流検出値に基づいて前記基本電力指令値を算出する、
モータ制御方法。
続きを表示(約 1,800 文字)
【請求項2】
請求項1に記載のモータ制御方法であって、
前記高周波信号の周波数を切り替えつつ前記基本電力指令値に重畳させ、
切り替え対象となる各周波数及びそれぞれの周波数に対応する前記高周波信号を重畳させる時間に基づいて、前記応答電流の強度が最大となる最大ピーク周波数を算出し、
前記電流検出値から、前記最大ピーク周波数に対応する前記高周波電流成分を除去して前記補正電流検出値を算出する、
モータ制御方法。
【請求項3】
請求項2に記載のモータ制御方法であって、
切り替え対象となる前記各周波数は、所定の第1周波数と前記第1周波数とは異なる第2周波数を含み、
重畳させる前記高周波信号の周波数を前記第1周波数と前記第2周波数との間で切り替え、
重畳させる前記第1周波数の前記高周波信号の周期数を示唆する第1係数に定め、
重畳させる前記第2周波数の前記高周波信号の周期数を示唆する第2係数に定め、
前記最大ピーク周波数を、前記第1周波数、前記第2周波数、前記第1係数、及び前記第2係数に基づいて算出する、
モータ制御方法。
【請求項4】
請求項1に記載のモータ制御方法であって、
前記ピーク周波数の内、前記応答電流の強度が所定の強度閾値以上となる除去対象周波数を抽出し、
前記補正電流検出値を、前記電流検出値から前記除去対象周波数に対応する前記高周波電流成分を除去することで算出する、
モータ制御方法。
【請求項5】
請求項4に記載のモータ制御方法であって、
切り替え対象となる前記各周波数は、所定の第1周波数と前記第1周波数とは異なる第2周波数を含み、
重畳させる前記高周波信号の周波数を前記第1周波数と前記第2周波数との間で切り替え、
前記第1周波数の前記高周波信号を重畳させる時間を所定の第1係数に定め、
前記第2周波数の前記高周波信号を重畳させる時間を所定の第2係数に定め、
前記応答電流の強度が最大となる最大ピーク周波数を、前記第1周波数、前記第2周波数、前記第1係数、及び前記第2係数に基づいて算出し、
前記最大ピーク周波数、前記第1係数、及び前記第2係数に基づいて、前記最大ピーク周波数を含む複数の前記ピーク周波数を算出し、
複数の前記ピーク周波数の内、前記応答電流の強度が前記強度閾値以上となるものを前記除去対象周波数として抽出する、
モータ制御方法。
【請求項6】
請求項5に記載のモータ制御方法であって、
前記第1係数及び/又は前記第2係数は、所定時間以下に設定される、
モータ制御方法。
【請求項7】
請求項4に記載のモータ制御方法であって、
抽出された前記除去対象周波数が所定の周波数閾値以上である場合には、前記電流検出値を第1フィルタで処理して前記補正電流検出値を算出し、
前記除去対象周波数が前記周波数閾値未満である場合には、前記電流検出値を第2フィルタで処理して前記補正電流検出値を算出し、
前記第2フィルタは、前記第1フィルタに対して前記除去対象周波数を中心とする阻止帯域幅が狭く設定される、
モータ制御方法。
【請求項8】
所定の基本電力指令値に高周波信号を重畳して電力指令値を定め、前記電力指令値の入力に対する応答電流を検出し、得られた電流検出値に基づいてモータの磁極位置を推定し、推定した前記磁極位置及び前記電力指令値に基づいて前記モータを制御するモータ制御装置であって、
複数の周波数成分を含む前記高周波信号を前記電力指令値に重畳する重畳部と、
前記応答電流の強度がピークとなる周波数を表すピーク周波数を算出する周波数算出部、
前記電流検出値から前記ピーク周波数に対応する高周波電流成分を抽出し、抽出した前記高周波電流成分に基づいて前記磁極位置を推定する推定部と、
前記電流検出値から前記高周波電流成分を除去した補正電流検出値を算出する補正電流算出部と、
前記補正電流検出値に基づいて前記基本電力指令値を算出する電力指令値算出部と、を有する、
モータ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ制御方法及びモータ制御装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来より、モータを駆動するために印加する駆動用電力(基本電力指令値)に、駆動用電力の周波数よりも高い周波数の高周波信号(高周波電圧)を重畳させてモータに供給し、その応答である高周波電流を抽出・処理してモータの回転子位相(磁極位置)を推定する制御方法(センサレス制御)が知られている。特に、特許文献1には、重畳させる高周波電圧の周波数を可変として、モータからの電磁騒音を低減する制御方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2004-343833号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、重畳させる高周波電圧の周波数を可変とすると、応答電流に含まれる高周波電流成分が、モータに要求される出力(駆動力)に応じて定まる基本電流に干渉して、制御安定性が低下することがある。
【0005】
したがって、本発明の目的は、重畳させる高周波信号の周波数を可変としても、磁極位置の推定精度及びモータの制御安定性を確保することのできるセンサレス制御を実現することにある。
【課題を解決するための手段】
【0006】
本発明のある態様によれば、所定の基本電力指令値に高周波信号を重畳して電力指令値を定め、電力指令値の入力に対する応答電流を検出し、得られた電流検出値に基づいてモータの磁極位置を推定し、推定した磁極位置及び電力指令値に基づいてモータを制御するモータ制御方法が提供される。
【0007】
特に、このモータ制御方法では、複数の周波数成分を含む高周波信号を基本電力指令値に重畳し、応答電流の強度がピークとなる周波数を表すピーク周波数を算出し、電流検出値からピーク周波数に対応する高周波電流成分を抽出して、高周波電流成分に基づいて磁極位置を推定し、電流検出値から高周波電流成分を除去した補正電流検出値を算出し、補正電流検出値に基づいて電力指令値を算出する。
【発明の効果】
【0008】
本発明によれば、重畳させる高周波信号の周波数を可変としても、磁極位置の推定精度及びモータの制御安定性を確保することができる。
【図面の簡単な説明】
【0009】
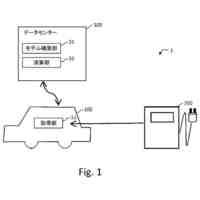
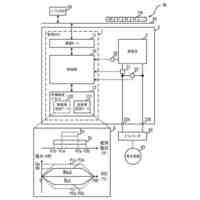
図1は、本発明の各実施形態によるモータ制御装置の構成を示すブロック図である。
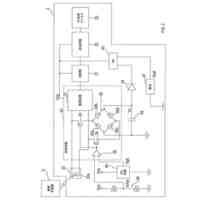
図2は、各実施形態による位相/回転数推定部における処理の流れを示すフローチャートである。
図3は、第1実施形態による高周波信号除去部における処理の流れを示すフローチャートである。
図4は、比較例1及び実施例1のモータ制御方法による制御結果の一例を示すタイミングチャートである。
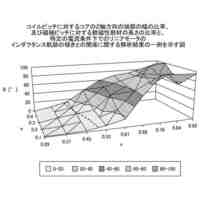
図5は、各ピーク周波数と応答電流強度との間に定まる関係の一例を示す図である。
図6は、第2実施形態による高周波信号除去部における処理の流れを示すフローチャートである。
図7は、比較例2及び実施例2のモータ制御方法による制御結果の一例を示すタイミングチャートである。
図8は、第3実施形態による高周波信号除去部における処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、図面を参照しながら本発明の各実施形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日産自動車株式会社
太陽電池付サンシェード
3日前
日産自動車株式会社
全固体電池
3日前
個人
太陽光発電システム
5日前
マグネデザイン株式会社
ロータ
1か月前
トヨタ自動車株式会社
予測方法
25日前
株式会社豊田自動織機
モータ冷却装置
1か月前
北勢工業株式会社
保護管
3日前
株式会社デンソー
電気装置
5日前
株式会社セイワ
車両用配線カバー
16日前
株式会社ダイヘン
充電装置
3日前
ダイハツ工業株式会社
ロータ構造
3日前
トヨタ自動車株式会社
電池制御装置
20日前
個人
バネとクラッチを用いた波浪発電装置
5日前
住友電装株式会社
電気接続箱
3日前
住友電装株式会社
電気接続箱
26日前
住友電装株式会社
電気接続箱
3日前
ダイハツ工業株式会社
曲げ加工装置
27日前
住友電装株式会社
電気接続箱
26日前
キヤノン株式会社
画像形成装置
3日前
富士電機株式会社
リニアモータ
16日前
株式会社ダイヘン
電力システム
3日前
株式会社豊田自動織機
回転電機
12日前
株式会社豊田自動織機
電動圧縮機
12日前
ダイハツ工業株式会社
ステータ製造装置
6日前
ダイハツ工業株式会社
コイル組付け装置
13日前
三菱電機株式会社
ゲート駆動装置
3日前
株式会社明電舎
電動機
4日前
ナブテスコ株式会社
駆動装置
20日前
株式会社エフ・シー・シー
太陽光発電装置
16日前
北海道電力株式会社
延線金車
11日前
トヨタ自動車株式会社
駆動ユニット
23日前
株式会社力電
配線スペース低減型の切替盤
1か月前
株式会社デンソー
携帯機
1か月前
一般財団法人電力中央研究所
電源装置
6日前
サンデン株式会社
電力変換装置
19日前
トヨタ自動車株式会社
挿入治具
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ