TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025091492
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2023206685
出願日
2023-12-07
発明の名称
画像形成装置
出願人
キヤノン株式会社
代理人
個人
,
個人
主分類
H02P
8/36 20060101AFI20250612BHJP(電力の発電,変換,配電)
要約
【課題】モータの制御を行う際の効率低下や駆動トルク不足の抑制を図ること。
【解決手段】モータ制御部14は、モータ15Fを500rpmで回転させ、Vref電圧と設定された進角とに基づいて負荷トルク値TRQを取得し、取得した負荷トルク値TRQと、モータ15Fのモータ回転速度指令値又はロータリーエンコーダ61により検知した回転速度に基づくモータ回転速度値SPDと、に基づいて進角を更新し、ロータリーエンコーダ61により検知されたロータの向きと更新された進角と、に応じてモータドライバIC60を制御する。
【選択図】図5
特許請求の範囲
【請求項1】
記録材に画像形成を行う画像形成装置であって、
コイルとロータとを有するステッピングモータと、
前記ロータの向きを検知する第1検知手段と、
前記コイルを励磁する励磁手段と、
前記第1検知手段により検知した前記ロータの向きに対する前記コイルを励磁するタイミングである進角を設定する設定手段と、
前記ロータの回転速度を検知する第2検知手段と、
前記ステッピングモータの制御を行う制御手段と、
を備え、
前記制御手段は、前記ステッピングモータを所定回転速度で回転させ、操作量と前記設定手段により設定された前記進角とに基づいて負荷トルク値を取得し、
前記設定手段は、前記制御手段により取得した前記負荷トルク値と、前記ステッピングモータの目標回転速度又は前記第2検知手段により検知した回転速度に基づく回転速度値と、に基づいて前記進角を更新し、
前記制御手段は、前記第1検知手段により検知された前記ロータの向きと前記設定手段により更新された進角と、に応じて前記励磁手段を制御することを特徴とする画像形成装置。
続きを表示(約 1,300 文字)
【請求項2】
前記操作量は、前記制御手段から前記励磁手段に出力されるアナログ電圧、又は、PWM信号のデューティを含むことを特徴とする請求項1に記載の画像形成装置。
【請求項3】
前記目標回転速度を第1回転速度としたとき、
前記所定回転速度は、前記第1回転速度よりも遅い、又は前記第1回転速度よりも進角の影響が小さい第2回転速度であることを特徴とする請求項1に記載の画像形成装置。
【請求項4】
前記設定手段は、前記目標回転速度と前記第2検知手段により検知した回転速度との差が所定範囲内である場合には、前記目標回転速度を前記回転速度値として前記進角を更新し、前記差が前記所定範囲を超えている場合には、前記第2検知手段により検知した回転速度を前記回転速度値として前記進角を更新することを特徴とする請求項1に記載の画像形成装置。
【請求項5】
前記設定手段は、前記第2検知手段により検知した回転速度をローパスフィルタ処理した値を前記回転速度値として前記進角を更新することを特徴とする請求項1に記載の画像形成装置。
【請求項6】
前記設定手段は、前記ステッピングモータの加速中又は減速中には、前記ローパスフィルタ処理した値を、ローパスフィルタの特性と加速度又は減速度、前記目標回転速度、前記第2検知手段により検知した回転速度、前記ローパスフィルタ処理した値、に応じて補正した値を前記回転速度値として前記進角を更新することを特徴とする請求項5に記載の画像形成装置。
【請求項7】
前記設定手段は、前記ステッピングモータの加速中には、前記ローパスフィルタ処理した値を、ローパスフィルタの特性と加速度、前記目標回転速度、前記第2検知手段により検知した回転速度、前記ローパスフィルタ処理した値、に応じて補正値を算出し、前記ローパスフィルタ処理した値に前記補正値を加算して補正した値を前記回転速度値として前記進角を更新することを特徴とする請求項6に記載の画像形成装置。
【請求項8】
前記設定手段は、前記ステッピングモータの減速中には、前記ローパスフィルタ処理した値を、ローパスフィルタの特性と減速度、前記目標回転速度、前記第2検知手段により検知した回転速度、前記ローパスフィルタ処理した値、に応じて補正値を算出し、前記ローパスフィルタ処理した値から前記補正値を減算して補正した値を前記回転速度値として前記進角を更新することを特徴とする請求項6に記載の画像形成装置。
【請求項9】
前記ローパスフィルタの特性は、前記ローパスフィルタの時定数を含むことを特徴とする請求項6から請求項8のうちのいずれか1項に記載の画像形成装置。
【請求項10】
前記回転速度値、前記負荷トルク値及び前記進角を関連付けた情報、又は、前記回転速度値及び前記負荷トルク値から前記進角を算出する計算式が保存された不揮発メモリを備え、
前記設定手段は、前記不揮発メモリに保存された前記情報又は前記計算式に基づいて前記進角を更新することを特徴とする請求項1に記載の画像形成装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、画像形成装置に関し、例えば、画像形成装置が備えるモータの制御技術に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
画像形成装置の駆動源として、ステッピングモータが使われている。ステッピングモータは、比較的容易に所望の回転速度や回転角度の制御が可能である一方で、脱調の可能性がある点に課題がある。そこで、脱調防止のために、ステッピングモータの動作を検知するエンコーダ等のセンサをつけ、フィードバック制御を行う方法が提案されている。例えば、特許文献1では、ステッピングモータにエンコーダを設け、フィードバック制御を行う構成を開示している。
【先行技術文献】
【特許文献】
【0003】
特開平10-174493号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
モータ制御回路のコストダウンを目的とした手法に、次のようなものがある。例えば、電流制御ループを持たず(コイル電流値をフィードバック制御せず)に、コイルに印加する電圧をオフ、オフ制御(BangBang制御)し、コイル電流値が目標値を超えないようにするだけの制御で、モータを駆動する手法がある。この場合、ステッピングモータのロータ動作に応じて適切なタイミングでコイルに電流が流れるように、検知したロータの電気角に対して、電圧を印加するタイミングを調整する必要がある。以後、電気角に対する電圧印加タイミングを、進角と記述する。進角が適切に設定されていない場合、駆動トルクの発生に寄与しない無駄な電流が流れることによる効率低下や、十分な電流が流れないことによる駆動トルク不足といった課題が起こるおそれがある。
【0005】
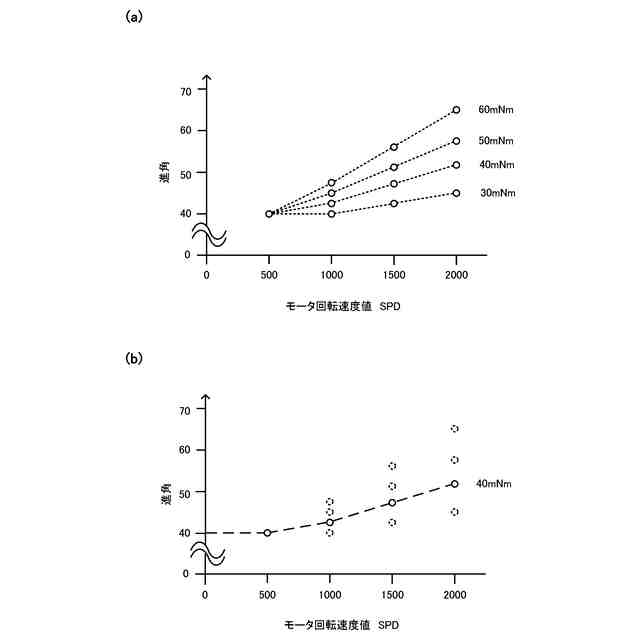
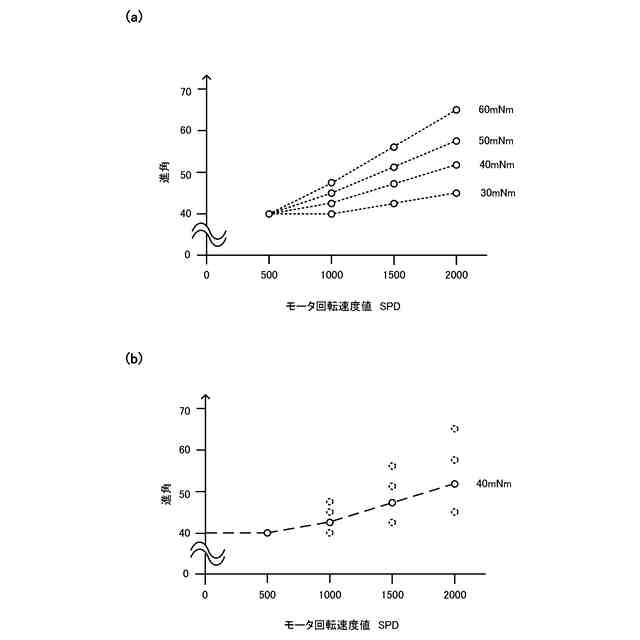
一般的に進角は、ステッピングモータの回転速度が速いほど、進角を進める、すなわちロータの電気角に対して、電圧印加のタイミングを早めるように設定する。しかし、モータの回転速度に応じて進角を設定する場合、モータの回転ムラ等による回転速度変動によって進角が変動し、モータの回転ムラを、さらに悪化させてしまうことがある。また、負荷トルクの大きさによっても進角を設定することが望ましいものの、想定される最大負荷トルクに対して影響が少ない進角に設定される。このため、負荷トルクが想定した最大負荷トルクと異なる場合には、駆動トルクの発生に寄与しない無駄な電流が流れることによる効率低下や、十分な電流が流れないことによる駆動トルク不足といった課題が起こるおそれがある。
【0006】
本発明は、このような状況のもとでなされたもので、モータの制御を行う際の効率低下や駆動トルク不足の抑制を図ることを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決するために、本発明は、以下の構成を備える。
【0008】
(1)記録材に画像形成を行う画像形成装置であって、コイルとロータとを有するステッピングモータと、前記ロータの向きを検知する第1検知手段と、前記コイルを励磁する励磁手段と、前記第1検知手段により検知した前記ロータの向きに対する前記コイルを励磁するタイミングである進角を設定する設定手段と、前記ロータの回転速度を検知する第2検知手段と、前記ステッピングモータの制御を行う制御手段と、を備え、前記制御手段は、前記ステッピングモータを所定回転速度で回転させ、操作量と前記設定手段により設定された前記進角とに基づいて負荷トルク値を取得し、前記設定手段は、前記制御手段により取得した前記負荷トルク値と、前記ステッピングモータの目標回転速度又は前記第2検知手段により検知した回転速度に基づく回転速度値と、に基づいて前記進角を更新し、前記制御手段は、前記第1検知手段により検知された前記ロータの向きと前記設定手段により更新された進角と、に応じて前記励磁手段を制御することを特徴とする画像形成装置。
【発明の効果】
【0009】
本発明によれば、モータの制御を行う際の効率低下や駆動トルク不足の抑制を図ることができる。
【図面の簡単な説明】
【0010】
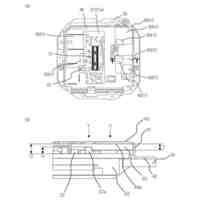
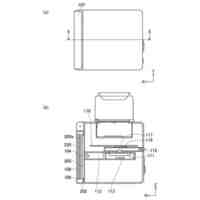
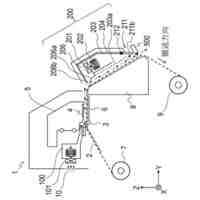
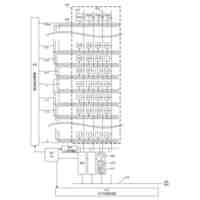
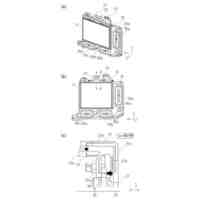
実施例1~3の画像形成装置の構成図、画像形成装置の制御構成図
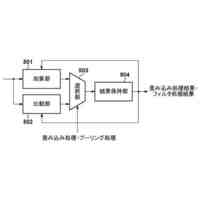
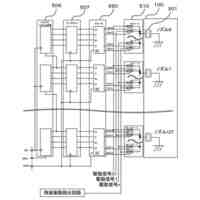
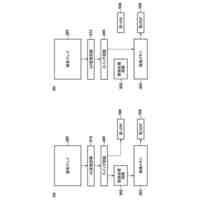
実施例1~3のモータ制御部の構成図
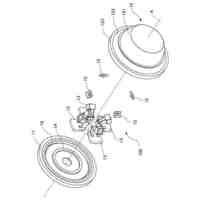
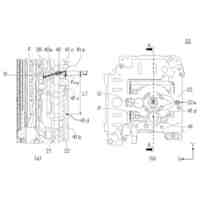
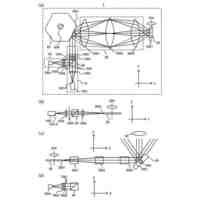
実施例1~3のモータの構成図、進角を説明する図
実施例1~3の回転速度、操作量、進角の関係を説明する図
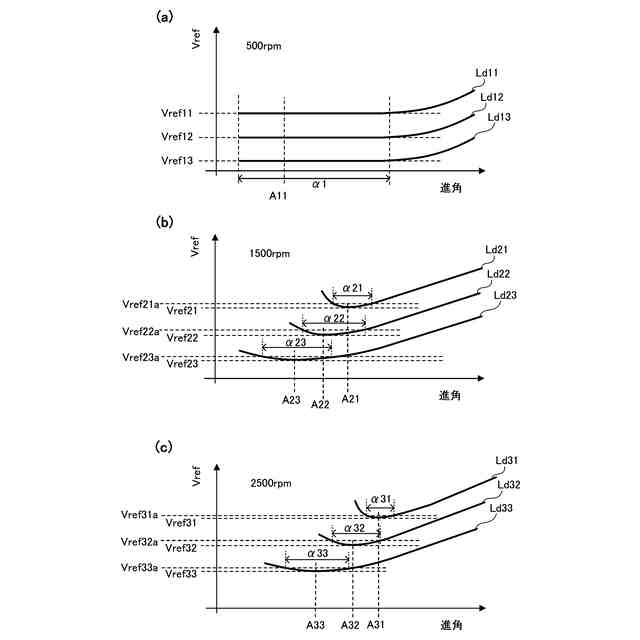
実施例1~3の進角カーブを示す図、進角設定例を示す図
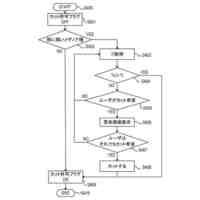
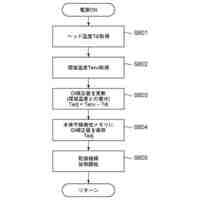
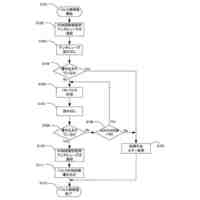
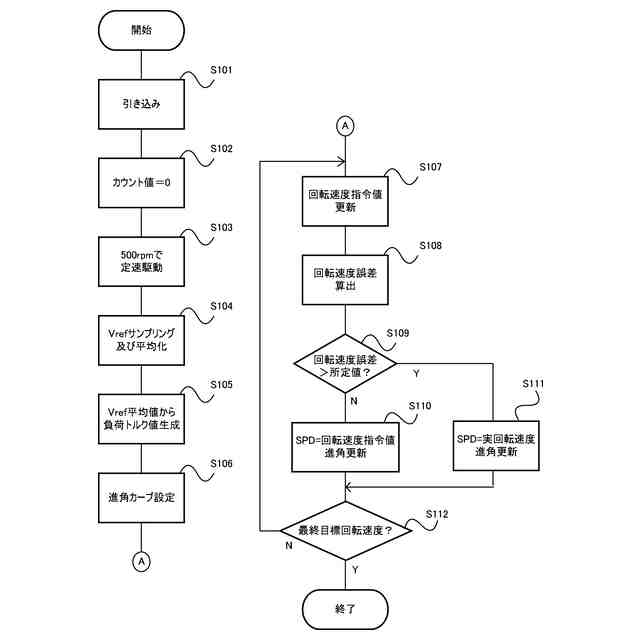
実施例1の起動シーケンスのフローチャート
実施例2の回転速度値生成の例を示す図
実施例3の進角設定例を示す図
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
27日前
キヤノン株式会社
トナー
27日前
キヤノン株式会社
トナー
22日前
キヤノン株式会社
トナー
22日前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
移動体
1か月前
キヤノン株式会社
顕微鏡
1か月前
キヤノン株式会社
測距装置
28日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
記録装置
1か月前
キヤノン株式会社
記録装置
1か月前
キヤノン株式会社
記録装置
1か月前
キヤノン株式会社
撮像装置
23日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
記録装置
1か月前
キヤノン株式会社
撮像装置
5日前
キヤノン株式会社
電子機器
27日前
キヤノン株式会社
処理装置
1か月前
キヤノン株式会社
記録装置
1か月前
キヤノン株式会社
記憶装置
1か月前
キヤノン株式会社
記録装置
1か月前
キヤノン株式会社
電源装置
27日前
キヤノン株式会社
記録装置
1か月前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
通信端末
22日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
光学装置
1か月前
キヤノン株式会社
撮像装置
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ