TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025091237
公報種別
公開特許公報(A)
公開日
2025-06-18
出願番号
2023206393
出願日
2023-12-06
発明の名称
運転診断システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人YKI国際特許事務所
主分類
G08G
1/00 20060101AFI20250611BHJP(信号)
要約
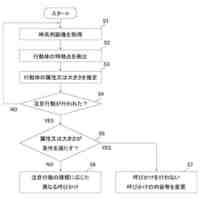
【課題】周囲の交通状況の影響を取り除くことで、ドライバの運転の特性をより反映させた運転内容の診断ができる運転診断システムを実現する。
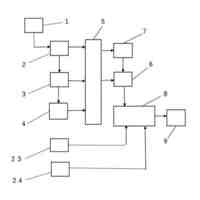
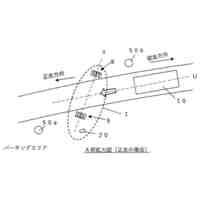
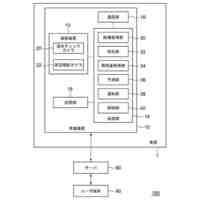
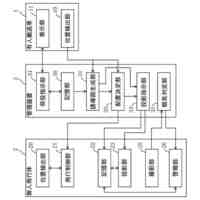
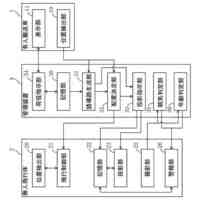
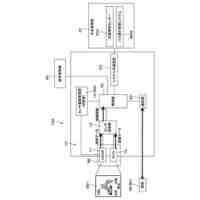
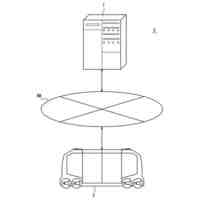
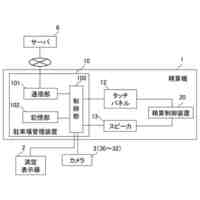
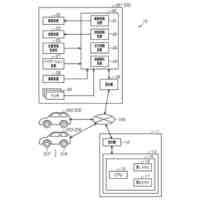
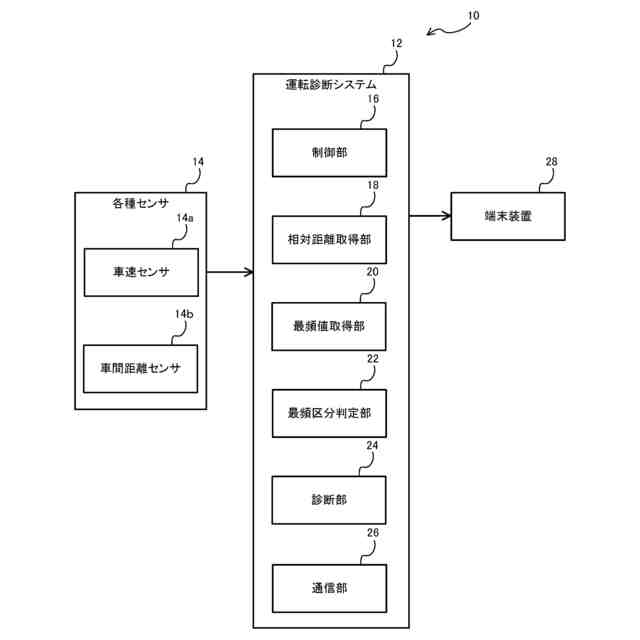
【解決手段】運転診断システムは、自車両10と先行車両との車間距離および自車速度に応じた相対距離を取得する相対距離取得部18と、前記相対距離の中から最頻値を取得する最頻値取得部20と、前記相対距離の大きさに応じた区分に分け、当該区分の中で最頻の区分を判定する最頻区分判定部22と、前記最頻値または前記最頻の区分に基づいて、前記自車両10における運転内容を診断する診断部24と、を備える。
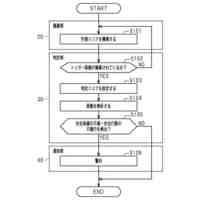
【選択図】図2
特許請求の範囲
【請求項1】
自車両と先行車両との車間距離および自車速度に応じた相対距離を取得する相対距離取得部と、
前記相対距離の中から最頻値を取得する最頻値取得部と、
前記相対距離の大きさに応じた区分に分け、当該区分の中で最頻の区分を判定する最頻区分判定部と、
前記最頻値または前記最頻の区分に基づいて、前記自車両における運転内容を診断する診断部と、
を備える運転診断システム。
続きを表示(約 180 文字)
【請求項2】
前記自車両および前記先行車両が停止状態の場合の前記相対距離は、前記車間距離である、
ことを特徴とする請求項1に記載の運転診断システム。
【請求項3】
前記自車両および前記先行車両が走行状態の場合の前記相対距離は、前記自車両と前記先行車両との車間時間である、
ことを特徴とする請求項1に記載の運転診断システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、運転診断システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
自車両と先行車両との相対関係に基づいて、自車両の運転内容を診断する技術がある。例えば、自車両と先行車両(以下、適宜「両車両」と称する。)との車間時間や車間距離が予め定めた値未満の場合には、自車両のドライバの運転内容をリスク度が高いと判断するシステムがある。
【0003】
特許文献1には、自車両と、先行車両または後続車両(以下、「他車両」と称する。)との車間距離に基づいて、自車両の運転者がリスク度の高い運転をしているか否かを判定する機能を有する運転診断装置が開示されている。この運転診断装置は、自車両と他車両との車間距離が予め定めた距離未満であって、自車両が一定の条件に該当する運転をした場合には、自車両の運転者がリスクのある運転をしているとしてリスク度が高くなるように判定する。このような構成により、この運転診断装置では、実際の運転者の運転に見合ったリスク度の判定ができるとされている。
【先行技術文献】
【特許文献】
【0004】
特開2015-151071号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、自車両と先行車両との車間距離の平均値や、車間距離が閾値よりも小さくなった回数など、に基づいて自車両のドライバの運転内容を診断するシステムや方法がある。このようなシステムや方法がドライバの車間距離の取り方など運転の特性を正しく捉えられていれば、運転診断の結果をドライバに対してフィードバックすることで、ドライバの安全運転の継続または運転の改善をサポートできる。しかし、ドライバの運転の特性とは関係なく、すなわち、自車両のドライバの運転操作に因らずに、両車両の距離が接近することがある。例えば、先行車両が急減速や急停車した場合や、隣の車線を走行する車両が自車両の前方に割り込んで新たな先行車両となった場合には、先行車両に起因して両車両の距離が接近する。また、両車両が渋滞に巻き込まれている場合にも、両車両の距離が接近する。これらのように、先行車両の行動なども含めた周囲の交通状況によってドライバの望む車間距離が確保できない場合まで、ドライバの運転の特性として判定され、運転内容が診断されることは望ましくない。
【0006】
そこで、本明細書では、先行車両の行動なども含めた周囲の交通状況の影響を取り除くことで、ドライバの運転の特性をより反映させた運転内容の診断ができる運転診断システムを実現する。
【課題を解決するための手段】
【0007】
本明細書で開示する運転診断システムは、自車両と先行車両との車間距離および自車速度に応じた相対距離を取得する相対距離取得部と、前記相対距離の中から最頻値を取得する最頻値取得部と、前記相対距離の大きさに応じた区分に分け、当該区分の中で最頻の区分を判定する最頻区分判定部と、前記最頻値または前記最頻の区分に基づいて、前記自車両における運転内容を診断する診断部と、を備える。
【0008】
上記の構成によれば、相対距離の最頻値または最頻の区分に基づいてドライバの運転内容を診断するため、予め定めた閾値を超えた回数や平均値に基づいて診断する場合には含まれていた周囲の交通状況の影響を取り除くことができ、よりドライバの運転の特性を診断に反映できる。
【0009】
また、前記運転診断システムにおいて、前記自車両および前記先行車両が停止状態の場合の前記相対距離は、前記車間距離である、ことを特徴とする。
【0010】
上記の構成によれば、自車両のドライバが停止するときにとる車間距離に基づいて運転内容を診断できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
2か月前
個人
自動車ケアフル灯
2か月前
能美防災株式会社
発信機
2か月前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
1か月前
個人
逆走・正走車両検出システム
1か月前
日本信号株式会社
情報提供システム
1か月前
アズビル株式会社
建物管理システム
18日前
ホーチキ株式会社
監視システム
2か月前
ホーチキ株式会社
異常報知設備
1か月前
ホーチキ株式会社
異常報知設備
1か月前
株式会社JVCケンウッド
通知システム
2か月前
タック株式会社
安全監視システム
2か月前
株式会社JVCケンウッド
情報処理装置
10日前
個人
磁気・光学誘導路線による車両の運行制御
1か月前
株式会社フィットネスワン
見守りシステム
1か月前
三菱ロジスネクスト株式会社
搬送システム
2か月前
三菱ロジスネクスト株式会社
搬送システム
2か月前
三菱ロジスネクスト株式会社
搬送システム
2か月前
トヨタ自動車株式会社
配車システム
1か月前
ホーチキ株式会社
非常通報システム
1か月前
株式会社アジラ
注目行動呼びかけシステム
2か月前
三菱ロジスネクスト株式会社
搬送システム
2か月前
日本信号株式会社
路側装置及びセンサ装置
2か月前
トヨタ自動車株式会社
障害物検知装置
4日前
ユニティガードシステム株式会社
警備監視システム
15日前
Adora株式会社
アプリ使用制御システム
29日前
能美防災株式会社
非常報知システム
1か月前
東亜電子工業株式会社
警報コントローラ
2か月前
トヨタ自動車株式会社
車両
2か月前
能美防災株式会社
火災感知器窓部清掃システム
2日前
シャープ株式会社
駐車場管理装置
26日前
株式会社アドヴィックス
走行支援システム
1か月前
トヨタ自動車株式会社
運転支援装置
1か月前
トヨタ自動車株式会社
車両
25日前
矢崎総業株式会社
路面監視装置
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ