TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025090420
公報種別
公開特許公報(A)
公開日
2025-06-17
出願番号
2023205626
出願日
2023-12-05
発明の名称
移動体及び移動体の飛行方法
出願人
DIC株式会社
代理人
個人
,
個人
,
個人
主分類
B64U
40/10 20230101AFI20250610BHJP(航空機;飛行;宇宙工学)
要約
【課題】風などの外的要因に依存せずに安定して移動できる移動体を提供する。
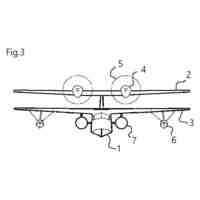
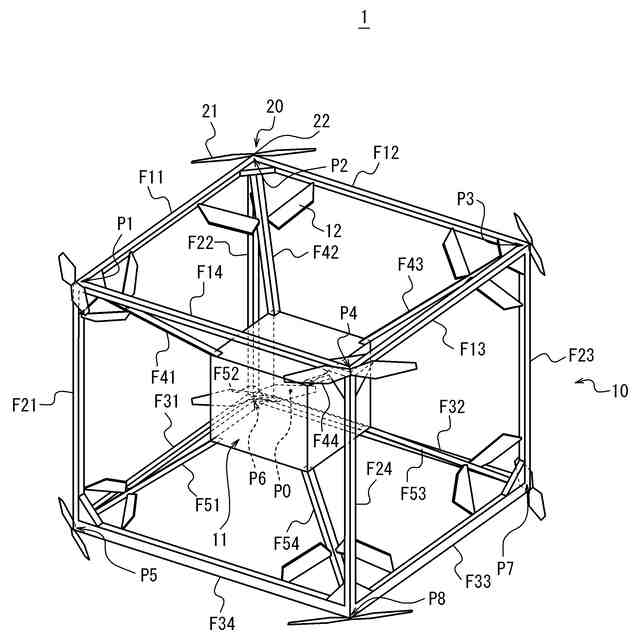
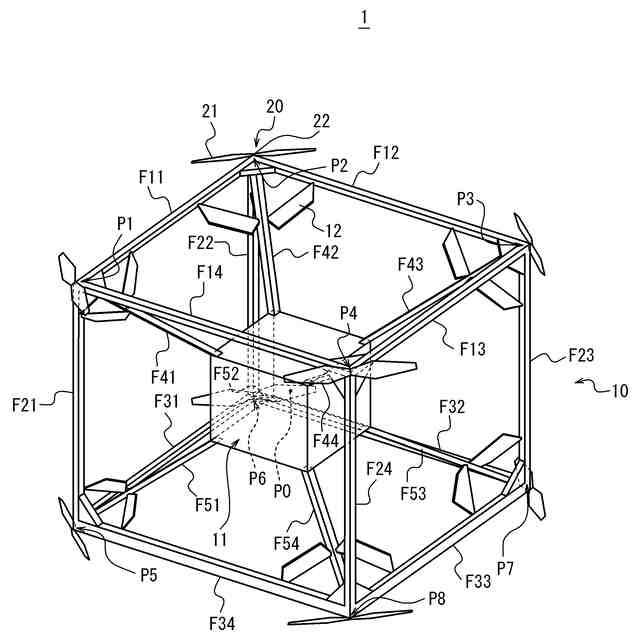
【解決手段】本開示に係る移動体1は、複数の支柱を有する本体部10と、本体部10の各頂点に位置して本体部10に取り付けられ、回転翼21及び回転翼21を駆動する駆動部22を含む回転翼モジュール20と、支柱に対する角度を変化可能な状態で本体部10に取り付けられている翼部12と、を備え、本体部10は、全ての頂点を結んだときに三次元形状を形成している。
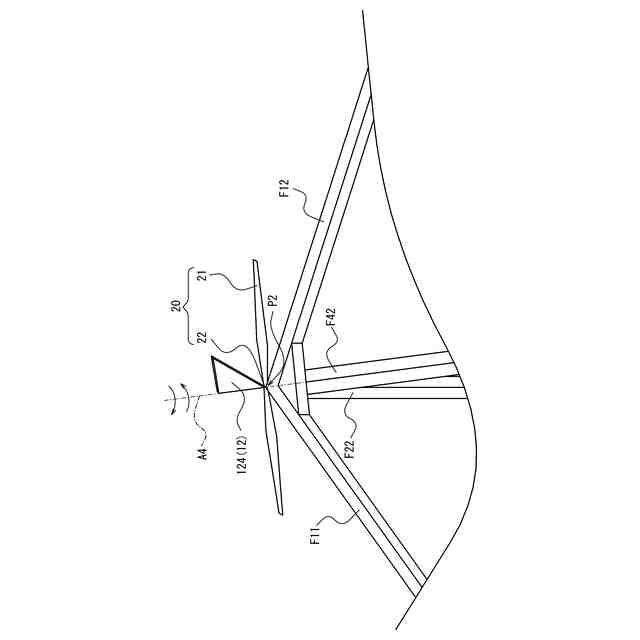
【選択図】図2
特許請求の範囲
【請求項1】
複数の支柱を有する本体部と、
前記本体部の各頂点に位置して前記本体部に取り付けられ、回転翼及び前記回転翼を駆動する駆動部を含む回転翼モジュールと、
前記支柱に対する角度を変化可能な状態で前記本体部に取り付けられている翼部と、
を備え、
前記本体部は、全ての前記頂点を結んだときに三次元形状を形成している、
移動体。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の移動体であって、
前記翼部は、前記回転翼が回転することで生じる気流に応じて所定の軸回りに揺動可能に取り付けられている、
移動体。
【請求項3】
請求項1に記載の移動体であって、
前記翼部に取り付けられている駆動部をさらに備え、
前記翼部は、前記駆動部によって所定の軸回りに回動可能に取り付けられている、
移動体。
【請求項4】
請求項2又は3に記載の移動体であって、
前記所定の軸は、一の前記支柱上の第1接続点と、一の前記支柱に隣接する他の前記支柱上の第2接続点とを互いに結ぶ第1軸を含み、
前記翼部は、前記第1接続点及び前記第2接続点により一の前記支柱及び他の前記支柱の両方に取り付けられている第1翼を含む、
移動体。
【請求項5】
請求項2又は3に記載の移動体であって、
前記所定の軸は、前記支柱に沿った第2軸を含み、
前記翼部は、前記支柱の表面に取り付けられている第2翼を含む、
移動体。
【請求項6】
請求項2又は3に記載の移動体であって、
前記所定の軸は、前記支柱に直交する第3軸を含み、
前記翼部は、前記支柱に直交するように取り付けられている第3翼を含む、
移動体。
【請求項7】
請求項2又は3に記載の移動体であって、
前記所定の軸は、前記頂点から前記本体部の外側に延出する第4軸を含み、
前記翼部は、前記頂点に位置して前記本体部の外側に延出するように前記本体部に取り付けられている第4翼を含む、
移動体。
【請求項8】
請求項1乃至3のいずれか1項に記載の移動体であって、
前記翼部が取り付けられている前記支柱の一端は前記頂点に接続され、他端は前記本体部の内側に位置する、
移動体。
【請求項9】
請求項1乃至3のいずれか1項に記載の移動体であって、
前記本体部は、第1多面体として形成され、
前記回転翼は、前記本体部の外側に位置し、前記本体部の内側に位置する基準点と前記第1多面体の前記頂点とを結ぶ直線を回転軸とする、
移動体。
【請求項10】
請求項9に記載の移動体であって、
前記第1多面体は、正六面体である、
移動体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体及び移動体の飛行方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、ドローンなどを含む移動体に関する技術が広く普及している。例えば、特許文献1には、回転球体フレーム付き無人航空機の振動防止と衝撃緩衝とを両立する装置が開示されている。例えば、特許文献2には、狭所からの垂直離陸後に翼で飛行し、ホバリングも可能であり、着陸後に地上移動可能であり、再離陸できる柔軟・有用な使用用途の飛行機が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-039488号公報
特許第4899069号
【発明の概要】
【発明が解決しようとする課題】
【0004】
移動体の活用分野が広がる中で、将来的には移動体に対する自動運転化を行うことも望まれている。このとき、移動体が風などの外的要因に依存せずに安定して移動できることは、一つの重要な要件である。
【0005】
本開示は、風などの外的要因に依存せずに安定して移動できる移動体及び移動体の飛行方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の課題を解決するための第1の観点による移動体は、
複数の支柱を有する本体部と、
前記本体部の各頂点に位置して前記本体部に取り付けられ、回転翼及び前記回転翼を駆動する駆動部を含む回転翼モジュールと、
前記支柱に対する角度を変化可能な状態で前記本体部に取り付けられている翼部と、
を備え、
前記本体部は、全ての前記頂点を結んだときに三次元形状を形成している。
【0007】
第2の観点による上記の移動体の飛行方法では、
前記第1多面体の一の面が鉛直方向の上側の面に位置した状態で、前記一の面の前記頂点に配置されている前記回転翼モジュールのみを動作させて移動及び姿勢維持を行う。
【0008】
第3の観点による上記の移動体の飛行方法では、
前記第1多面体の一の頂点に位置する前記回転翼モジュールが鉛直上方向に位置し、反対側の他の頂点に位置する前記回転翼モジュールが鉛直下方向に位置した状態で、2つの前記回転翼の回転方向が互いに反対となるように2つの前記回転翼モジュールのみを動作させて移動及び姿勢維持を行う。
【発明の効果】
【0009】
本開示によれば、風などの外的要因に依存せずに安定して移動できる移動体及び移動体の飛行方法を提供可能である。
【図面の簡単な説明】
【0010】
本開示の一実施形態に係る移動体の構成を模式的に示す外観斜視図である。
図1の移動体の構成の一部を模式的に示す外観斜視図である。
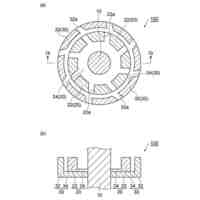
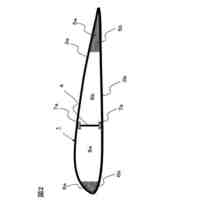
図2における正六面体の側面側を模式的に示した側面図である。
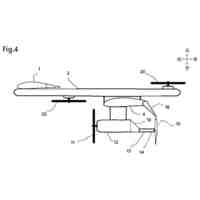
図2に示される移動体の構成の一部を拡大して模式的に示す拡大斜視図である。
図4に示される移動体の一部の構成の他の例を模式的に示す拡大斜視図である。
図4に示される移動体の一部の構成の他の例を模式的に示す拡大斜視図である。
図4に示される移動体の一部の構成の他の例を模式的に示す拡大斜視図である。
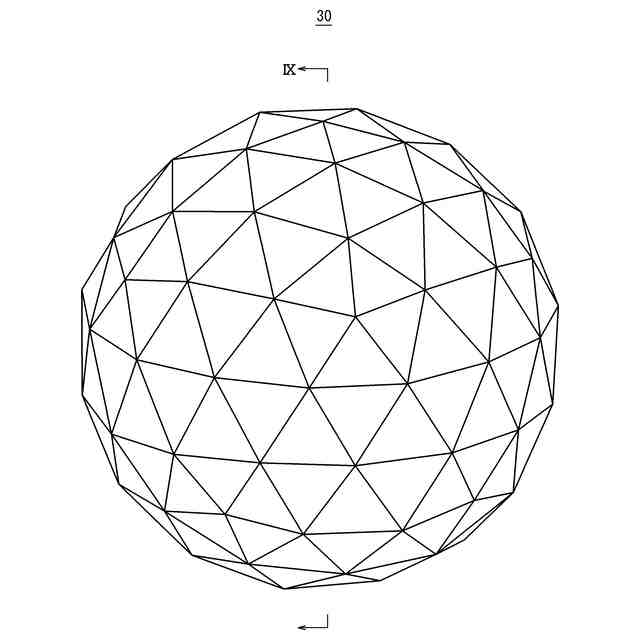
図1の移動体の構成の他の一部を模式的に示す外観斜視図である。
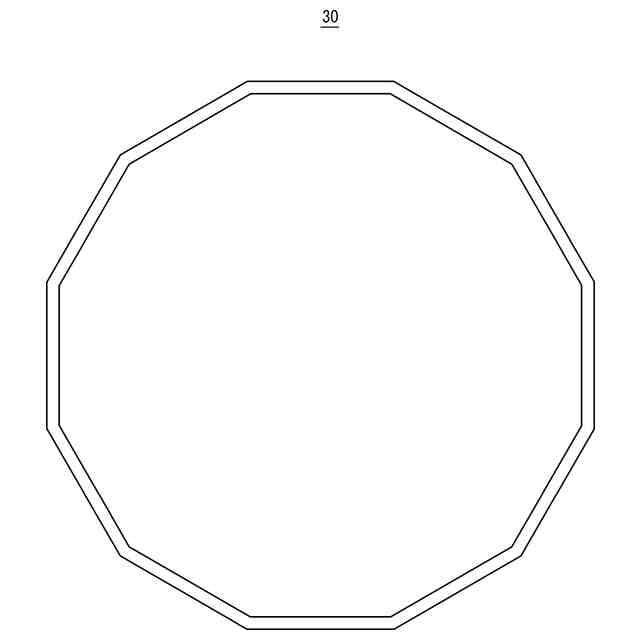
図8のIX-IX矢線に沿う断面を示す模式図である。
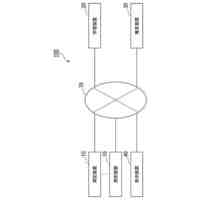
図1の移動体の構成の一例を概略的に示す機能ブロック図である。
第1変形例に係るケージの構成の一部を模式的に示す外観斜視図である。
第2変形例に係るケージの構成の一部を模式的に示す外観斜視図である。
第3変形例に係るケージの構成の一部を模式的に示す外観斜視図である。
第4変形例に係るケージの構成の一部を模式的に示す外観斜視図である。
第5変形例に係るケージの構成の一部を模式的に示す外観斜視図である。
第6変形例に係るケージの構成の一部を模式的に示す外観斜視図である。
第7変形例に係るケージの構成の一部を模式的に示す外観斜視図である。
第8変形例に係るケージの構成の一部を模式的に示す外観斜視図である。
第9変形例に係るケージの構成の一部を模式的に示す外観斜視図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
DIC株式会社
二酸化炭素吸収材
1か月前
DIC株式会社
積層体、および包装材
20日前
DIC株式会社
プリプレグ及び成形品
1か月前
DIC株式会社
アスパラギン酸の製造方法
1か月前
DIC株式会社
硬化性樹脂組成物及び硬化物
1か月前
DIC株式会社
硬化性樹脂組成物及び硬化物
1か月前
DIC株式会社
モリブデン化合物の回収方法
1か月前
DIC株式会社
粘着テープ、部品、電子機器及び車両
1か月前
DIC株式会社
匣鉢、匣鉢の製造方法、焼成物の製造方法
1か月前
DIC株式会社
植物育成剤、植物栽培用組成物、及び植物を栽培する方法
2か月前
DIC株式会社
着色フィルム、着色粘着テープ及び着色フィルムの製造方法
20日前
DIC株式会社
活性エネルギー線硬化型樹脂組成物、塗膜及び積層フィルム
26日前
DIC株式会社
化粧料用顔料組成物及び化粧料
1か月前
DIC株式会社
トナー用結着樹脂組成物、トナー粒子、静電荷像現像用トナーおよび静電荷像現像剤
1か月前
DIC株式会社
カーボンブラック組成物、着色剤、インキ、及び、カーボンブラック組成物の製造方法
12日前
DIC株式会社
トナー用ポリエステル樹脂、トナー粒子、静電荷像現像用トナーおよび静電荷像現像剤
11日前
DIC株式会社
負極バインダー組成物、負極、及び二次電池
27日前
DIC株式会社
着色剤、顔料組成物及び水性顔料分散体の製造方法
1か月前
DIC株式会社
硬化性組成物、硬化物、プリプレグ、回路基板、ビルドアップフィルム、半導体封止材及び半導体装置
1か月前
DIC株式会社
硬化性組成物、硬化物、プリプレグ、回路基板、ビルドアップフィルム、半導体封止材、及び半導体装置
1か月前
DIC株式会社
硬化性樹脂組成物、硬化物、積層体、及び硬化性化合物、
6日前
DIC株式会社
学習装置、推定装置、推定システム、表示装置、表示システム、学習方法、推定方法及びコンピュータープログラム
20日前
DIC株式会社
リチウムイオン二次電池用負極活物質、当該物質を用いたリチウムイオン二次電池用負極及びリチウムイオン二次電池
10日前
DIC株式会社
硬化性組成物、ポリマレイミド樹脂、硬化物、プリプレグ、回路基板、ビルドアップフィルム、半導体封止材および半導体装置
1か月前
DIC株式会社
プロペニル基含有化合物、硬化性樹脂組成物、硬化物、プリプレグ、回路基板、ビルドアップフィルム、半導体封止材、及び半導体装置
12日前
個人
ドローン
5か月前
個人
人工台風
1か月前
個人
着火ドローン
2か月前
個人
救難消防飛行艇
3か月前
個人
ドローンシステム
7か月前
東レ株式会社
中空回転翼
2か月前
株式会社三圓
浮上装置
11か月前
個人
陸海空用の乗り物
4か月前
個人
導風板付き垂直離着陸機
24日前
個人
連続回転可能な飛行機翼
3か月前
個人
ドローンの計測操作方法3
11か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ