TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025087959
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023202306
出願日
2023-11-30
発明の名称
車両制御方法及び車両制御装置
出願人
日産自動車株式会社
代理人
個人
,
個人
,
個人
主分類
B60W
30/02 20120101AFI20250604BHJP(車両一般)
要約
【課題】高μ路における加速性と低μ路におけるライントレース性とを両立する駆動力制御を実現する。
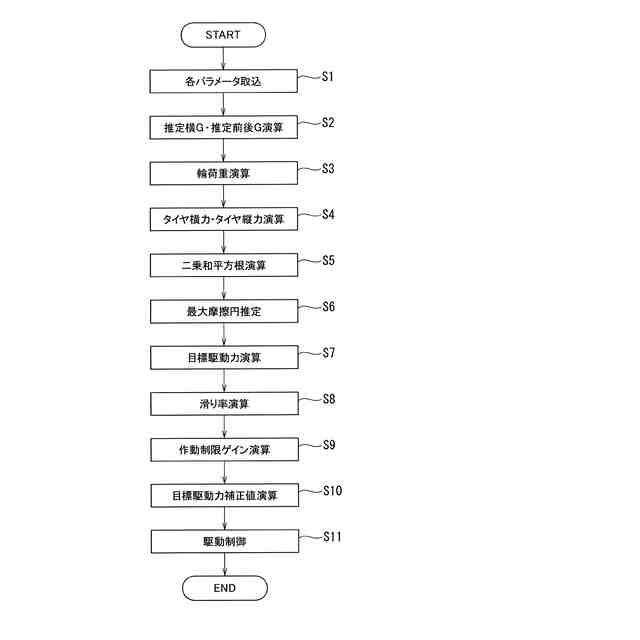
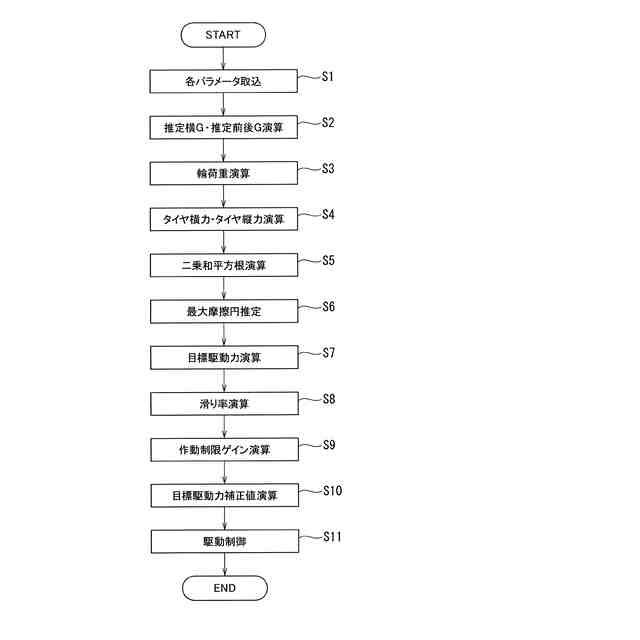
【解決手段】車両制御方法では、車両の前後加速度及び横加速度を加速度センサで検出し(S1)、車両の車輪に作用する接地荷重を推定し(S3)、接地荷重と前後加速度と横加速度に基づいて車輪の最大摩擦円を推定し(S6)、タイヤ横力を推定し(S4)、最大摩擦円とタイヤ横力とに基づいて、車輪に発生させるタイヤ縦力の目標値である目標タイヤ縦力を演算し(S7)、目標タイヤ縦力に基づいて車両の駆動力を制限する(S11)。車両制御方法では、車両のアクセル開度に基づいて推定前後加速度を演算し(S2)、車両の操舵角に基づいて推定横加速度を演算し(S2)、前後加速度と横加速度と推定前後加速度と推定横加速度とに基づいて、目標タイヤ縦力に基づく車両の駆動力の制限を抑制する(S10、S11)。
【選択図】図6
特許請求の範囲
【請求項1】
車両の前後加速度及び横加速度を加速度センサにより検出し、
前記車両の車輪に作用する接地荷重を推定し、
前記接地荷重と前記前後加速度と前記横加速度とに基づいて前記車輪の最大摩擦円を推定し、
前記車輪に作用するタイヤ横力を推定し、
前記最大摩擦円と前記タイヤ横力とに基づいて、前記車輪に発生させるタイヤ縦力の目標値である目標タイヤ縦力を演算し、
前記目標タイヤ縦力に基づいて前記車両の駆動力を制限する車両制御方法であって、
前記車両のアクセル開度に基づいて推定前後加速度を演算し、
前記車両の操舵角に基づいて推定横加速度を演算し、
前記前後加速度と前記横加速度と前記推定前後加速度と前記推定横加速度とに基づいて、前記目標タイヤ縦力に基づく前記車両の駆動力の制限を抑制する、
ことを特徴とする車両制御方法。
続きを表示(約 1,100 文字)
【請求項2】
前記前後加速度と前記推定前後加速度とに基づいて、前後方向の前記車両の滑り率である第1滑り率を演算し、
前記横加速度と前記推定横加速度とに基づいて、横方向の前記車両の滑り率である第2滑り率を演算し、
前記第1滑り率と前記第2滑り率とに基づいて、前記目標タイヤ縦力に基づく前記車両の駆動力の制限を抑制する、
ことを特徴とする請求項1に記載の車両制御方法。
【請求項3】
前記第1滑り率又は前記第2滑り率の一方が所定値以上の場合に、前記目標タイヤ縦力に基づく前記車両の駆動力の制限を抑制することを特徴とする請求項2に記載の車両制御方法。
【請求項4】
前記第1滑り率又は前記第2滑り率の両方が所定値以上の場合に、前記目標タイヤ縦力に基づく前記車両の駆動力の制限を抑制することを特徴とする請求項2に記載の車両制御方法。
【請求項5】
前記第1滑り率は、遅延処理を行った前記推定前後加速度に基づいて演算することを特徴とする請求項2に記載の車両制御方法。
【請求項6】
前記第2滑り率は、遅延処理を行った前記推定横加速度に基づいて演算することを特徴とする請求項2に記載の車両制御方法。
【請求項7】
前記前後加速度及び前記横加速度の平方和に基づいて、前記目標タイヤ縦力に基づく前記車両の駆動力の制限を抑制することを特徴とする請求項2に記載の車両制御方法。
【請求項8】
前記平方和が所定値以上の場合に、前記目標タイヤ縦力に基づく前記車両の駆動力の制限を抑制することを特徴とする請求項7に記載の車両制御方法。
【請求項9】
車両の前後加速度及び横加速度を検出する加速度センサと、
前記車両の車輪に作用する接地荷重を推定する処理と、前記接地荷重と前記前後加速度と前記横加速度とに基づいて前記車輪の最大摩擦円を推定する処理と、前記車輪に作用するタイヤ横力を推定する処理と、前記最大摩擦円と前記タイヤ横力とに基づいて、前記車輪に発生させるタイヤ縦力の目標値である目標タイヤ縦力を演算する処理と、前記目標タイヤ縦力に基づいて前記車両の駆動力を制限する処理と、を実行するコントローラと、
を備える車両制御装置であって、
前記コントローラは、前記車両のアクセル開度に基づいて推定前後加速度を演算し、前記車両の操舵角に基づいて推定横加速度を演算し、前記前後加速度と前記横加速度と前記推定前後加速度と前記推定横加速度とに基づいて、前記目標タイヤ縦力に基づく前記車両の駆動力の制限を抑制することを特徴とする車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御方法及び車両制御装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
下記特許文献1の車両の制御装置は、路面摩擦係数、各輪接地荷重、及び各輪横力から、各輪許容駆動力を演算し、各輪許容駆動力に基づいて許容エンジントルクを演算してエンジン出力を制限すると共に、前後駆動力配分制御におけるトランスファクラッチトルク、左右駆動力配分制御における後輪トルク移動量、操舵角制御における舵角補正量を演算する。
【先行技術文献】
【特許文献】
【0003】
特開2008-207671号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1による制御装置では、タイヤの最大摩擦円を超えるエンジン出力が制限されるため、高μ路においてタイヤのスリップを許容して加速性を優先することができない。一方で加速性を優先させるためにエンジン出力の制限を抑制すると、低μ路においてライントレース性を損なうという課題がある。
本発明は、高μ路における加速性と低μ路におけるライントレース性とを両立する駆動力制御を実現することを目的とする。
【課題を解決するための手段】
【0005】
本発明の一態様による車両制御方法では、車両の前後加速度及び横加速度を加速度センサにより検出し、車両の車輪に作用する接地荷重を推定し、接地荷重と前後加速度と横加速度とに基づいて車輪の最大摩擦円を推定し、車輪に作用するタイヤ横力を推定し、最大摩擦円とタイヤ横力とに基づいて、車輪に発生させるタイヤ縦力の目標値である目標タイヤ縦力を演算し、目標タイヤ縦力に基づいて車両の駆動力を制限する。車両制御方法では、車両のアクセル開度に基づいて推定前後加速度を演算し、車両の操舵角に基づいて推定横加速度を演算し、前後加速度と横加速度と推定前後加速度と推定横加速度とに基づいて、目標タイヤ縦力に基づく車両の駆動力の制限を抑制する。
【発明の効果】
【0006】
本発明によれば、本発明は、高μ路における加速性と低μ路におけるライントレース性とを両立する駆動力制御を実現できる。
【図面の簡単な説明】
【0007】
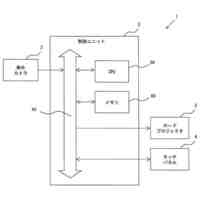
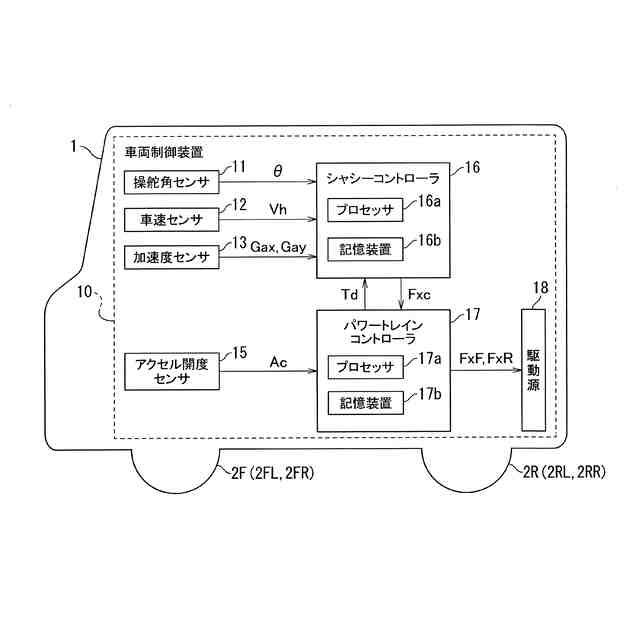
実施形態の車両制御装置の一例の概略構成図である。
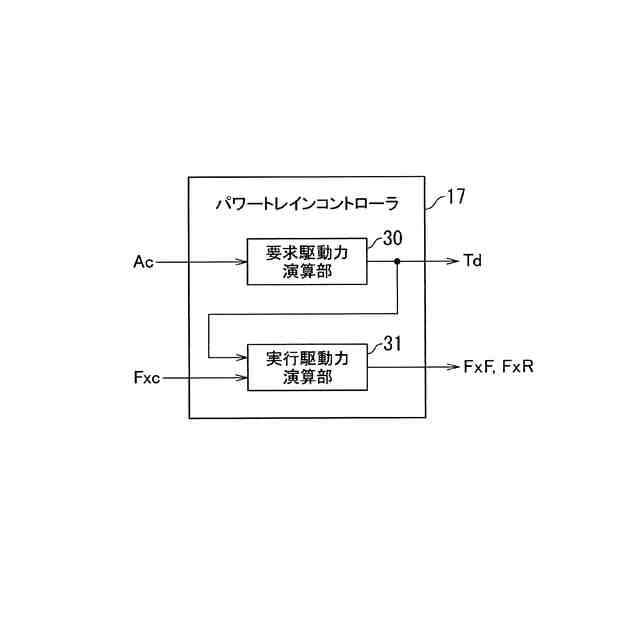
パワートレインコントローラの機能構成例のブロック図である。
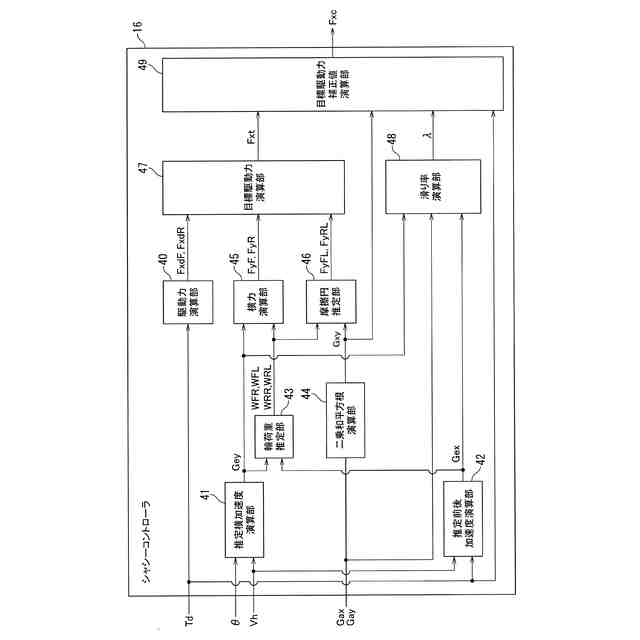
シャシーコントローラの機能構成例のブロック図である。
目標駆動力補正値演算部の機能構成例のブロック図である。
作動制限ゲインの一例の特性図である。
実施形態の車両制御方法の一例のフローチャートである。
【発明を実施するための形態】
【0008】
以下、本発明の実施形態について、図面を参照しつつ説明する。なお、各図面は模式的なものであって、現実のものとは異なる場合がある。また、以下に示す本発明の実施形態は、本発明の技術的思想を具体化するための装置や方法を例示するものであって、本発明の技術的思想は、構成部品の構造、配置等を下記のものに特定するものではない。本発明の技術的思想は、特許請求の範囲に記載された請求項が規定する技術的範囲内において、種々の変更を加えることができる。
【0009】
(構成)
図1を参照する。実施形態の車両制御装置10は車両1に搭載されて、車両1の右前輪2FR、左前輪2FL、右後輪2RR及び左後輪2RLに発生させる各々の駆動力を制御する。以下の説明において、右前輪2FR及び左前輪2FLを総称して「前輪2F」と表記し、右後輪2RR及び左後輪2RLを総称して「後輪2R」と表記することがある。
また、右前輪2FR及び左前輪2FLのうち旋回内輪側の車輪を、前旋回内輪2FIと表記し、右後輪2RR及び左後輪2RLのうち旋回内輪側の車輪を、後旋回内輪2RIと表記することがある。
【0010】
車両制御装置10は、操舵角センサ11と、車速センサ12と、加速度センサ13と、アクセル開度センサ15と、シャシーコントローラ16と、パワートレインコントローラ17と、駆動源18とを備える。
操舵角センサ11は、ステアリングホイールの操舵角θを検出する。車速センサ12は、車両1の車速Vhを検出する。加速度センサ13は、車両1に作用する前後加速度Gax及び横加速度Gayを検出する。
アクセル開度センサ15は、運転者によるアクセルペダルの操作量に応じたアクセル開度Acを検出する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
12日前
個人
車窓用防虫網戸
1か月前
個人
警告装置
2か月前
個人
小型EVシステム
2か月前
個人
車輪清掃装置
16日前
日本精機株式会社
ケース
2か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
3か月前
井関農機株式会社
作業車両
4日前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
照明装置
3か月前
井関農機株式会社
作業車両
6日前
個人
アンチロール制御装置
2か月前
個人
ワイパーゴム性能保持具
25日前
株式会社松華
懸架装置
3か月前
個人
ブレーキシステム
2か月前
個人
ステージカー
3か月前
株式会社クラベ
ヒータユニット
1か月前
個人
自走式立体型洗車場
3か月前
個人
自動車ドア開度規制ベルト
2か月前
井関農機株式会社
収穫作業車両
1か月前
横浜ゴム株式会社
タイヤ
2か月前
井関農機株式会社
作業車両
1か月前
株式会社ユーシン
照明装置
1か月前
日本精機株式会社
車両用投影装置
6日前
日本精機株式会社
車両用投影装置
6日前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
車両用表示装置
1か月前
株式会社ユーシン
照明装置
2か月前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
3か月前
帝国繊維株式会社
作業車両
2か月前
日本精機株式会社
車両用表示装置
3か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ