TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025087582
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2024169763
出願日
2024-09-30
発明の名称
スライシングモデルを使用して車線境界を推定するシステム及び方法
出願人
ウーブン・バイ・トヨタ株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G06T
7/00 20170101AFI20250603BHJP(計算;計数)
要約
【課題】マップを生成するために道路データとともにスライシングモデルを使用して車線境界を推定するシステム、方法を提供すること。
【解決手段】一実施形態では、本方法は、走行車線に関連付けられる道路縁部に関する取得されたデータから離散化された3次元(3D)表現を計算することを含む。本方法はまた、スライシングモデルを使用して道路縁部の離散的かつ横方向スライスを導出することを含み、道路縁部は、マップ化された領域を記述する道路グラフにおいて接続される。本方法はまた、走行車線に関する車線境界を推定するためのヒストグラムを形成するためにニューラルモデルを使用して、横方向スライスから個々に特徴を抽出することを含む。本方法はまた、道路縁部に沿って車線境界を個々に連結することによってマップを生成することを含む。
【選択図】図3
特許請求の範囲
【請求項1】
推定システムであって、
プロセッサと、
前記プロセッサによって実行されたとき、前記プロセッサに、
走行車線に関連付けられる道路縁部に関する取得されたデータから離散化された3次元(3D)表現を計算させ、
スライシングモデルを使用して前記道路縁部の離散的かつ横方向スライスを導出させ、前記道路縁部が、マップ化された領域を記述する道路グラフにおいて接続され、
前記走行車線に関する車線境界を推定するためのヒストグラムを形成するためにニューラルモデルを使用して、前記横方向スライスから個々に特徴を抽出させ、
前記道路縁部に沿って前記車線境界を個々に連結することによってマップを生成させる、
命令を記憶するメモリと、
を備える、推定システム。
続きを表示(約 1,400 文字)
【請求項2】
前記ヒストグラムのビン内の圧縮データをカウントすることにより、前記車線境界の信頼値及び境界配置をデコーダによって出力する命令をさらに含み、前記ビンがそれぞれ前記横方向スライスの1つに関連付けられており、前記ニューラルモデルが前記デコーダを含む、請求項1に記載の推定システム。
【請求項3】
前記マップを生成する前記命令が、前記信頼値及び前記境界配置から前記車線境界までの逆距離を使用して前記マップを変換する命令をさらに含む、請求項2に記載の推定システム。
【請求項4】
前記特徴を抽出する前記命令が、
前記取得されたデータから、異なるチャネルに対する行列計算を使用して、前記走行車線の検出されたキーポイントを処理し、前記行列計算が、前記ニューラルモデルの層ごとのカーネルサイズを因子化し、前記異なるチャネルが、前記横方向スライスのギャップを埋め、
前記車線境界を推定するために、前記行列計算から非線形性をフィッティングする、
命令をさらに含む、
請求項1に記載の推定システム。
【請求項5】
前記ニューラルモデルの前記層が、1つ又は複数の前記横方向スライス内の車両のトレースポイントを含み、前記トレースポイントが車線の方向性を識別する、請求項4に記載の推定システム。
【請求項6】
前記ヒストグラムのビン内の圧縮データ間の距離に従って、前記ニューラルモデルを使用して前記特徴を選択する命令、をさらに含む、請求項4に記載の推定システム。
【請求項7】
前記マップを生成する前記命令が、前記道路縁部の少なくとも1つについて隣接している2つ以上の前記横方向スライスに従って、前記車線境界を個々に連結する命令をさらに含み、前記2つ以上の前記横方向スライスが、前記道路縁部の特徴明瞭度を満たす、請求項1に記載の推定システム。
【請求項8】
前記ヒストグラム内の前記特徴を集約する命令をさらに含み、前記特徴が、前記取得されたデータからの異なるチャネルに関連付けられる隣接スライス、信頼値、車両間の距離、境界タイプ、車線オフセット、面タイプ、時刻、及び方位のうちの1つを含む、請求項1に記載の推定システム。
【請求項9】
前記横方向スライスが、長手方向にスケーラブルである固定された寸法を有する前記道路縁部のサブセクションであり、前記ヒストグラム内の情報が、前記固定された寸法及びスケーラビリティに従って変化する、請求項1に記載の推定システム。
【請求項10】
非一時的なコンピュータ可読媒体であって、
プロセッサによって実行されたとき、前記プロセッサに、
走行車線に関連付けられる道路縁部に関する取得されたデータから離散化された3次元(3D)表現を計算させ、
スライシングモデルを使用して前記道路縁部の離散的かつ横方向スライスを導出させ、前記道路縁部が、マップ化された領域を記述する道路グラフにおいて接続され、
前記走行車線に関する車線境界を推定するためのヒストグラムを形成するためにニューラルモデルを使用して、前記横方向スライスから個々に特徴を抽出させ、
前記道路縁部に沿って前記車線境界を個々に連結することによってマップを生成させる、
命令を備える、非一時的なコンピュータ可読媒体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書で説明する主題は、一般的には、道路の車線境界の更新に関し、より詳細には、マップを生成するために道路データとともにスライシングモデルを使用して車線境界を推定することに関する。
続きを表示(約 3,600 文字)
【背景技術】
【0002】
車両は、運転タスクを実行するために、センサから道路に関するデータを取得する。例えば、車両はセンサデータを使用して、他の車両、障害物、歩行者、及び周辺環境の追加的な態様を認識しやすくする。様々な実装形態では、車両は、周辺環境をスキャンするために光を発する光検出及び測距(light detection and ranging、LIDAR)センサを使用し、一方でLIDARに関連付けられたロジックは、取得されたデータを分析して、周辺環境のオブジェクト及び他の特徴の存在を検出する。さらなる例では、カメラなどの追加/代替センサが周辺環境に関する情報を取得し、そこからシステムが周辺環境の態様に関する認識を導出する。このセンサデータは、自動運転システム(automated driving systems、ADS)などのシステムが、指摘された態様を認識し、それに応じて正確に計画及びナビゲートできるように、周辺環境の認識を向上させるために様々な状況において有用であり得る。
【0003】
ナビゲーションに関しては、車両はセンサデータを処理して古くなったマップを更新する。例えば、車両は、速度低下を示す標識を検出し、GPS(全地球測位システム)データを使用して、マップデータが古くなっていることを特定することで、工事現場を推測する。しかしながら、ADSは、精度を確保するために高精細(high-definition、HD)マップに依存する複雑なタスクを実行する。マップの更新にセンサデータ(例えば、画像、GPSなど)を使用する車両では、複雑なタスクに対して精度が不充分になる可能性がある。そのように、1つのアプローチでは、システムは、特徴(例えば、車線境界)を手動でアノテーションすることによりマップを更新するために道路に関する高度なデータを取得する専用車両を配備する。専用車両及び手動支援はコストが高く、HDマップを維持するのに有効でないため、ADS動作及び他の運転タスクの信頼性を低下させる。
【発明の概要】
【課題を解決するための手段】
【0004】
一実施形態では、例示的なシステム及び方法は、マップを生成するために道路データとともにスライシングモデルを使用して車線境界を推定することに関する。様々な実装形態において、マップを更新するシステムでは、特に高精細(HD)マップに関与してコスト及び複雑さが増大する。例えば、新設及び補修によって変更された車線境界及びラインを更新するシステムでは、車両から取得された画像データ(例えば、フリートデータ)に手動でアノテーションする。しかしながら、手動によるデータのアノテーションは、コストがかかり、非効率であり、リアルタイムの更新に遅れが生じる。あるいは、自動マップ生成プラットフォーム(automated mapping platform、AMP)内でセンサデータを処理するシステムは、HDマップを更新することができるが、複雑な運転タスク(例えば、車線追跡)のための精度に欠け、それによって安全性が低下する。したがって、一実施形態では、推定システムは、特徴を抽出することによってニューラルモデルが車線境界を推定できるように、道路縁部に沿って取得されたデータをスライスする。ここで、道路マップは、ノード(例えば、交差点)で結合するセグメントを表す道路縁部を有する領域のトポロジーを定義する。推定システムは、道路縁部に関するデータを離散化することによって効率及びスケーラビリティを向上させるスライシングモデルを使用して、横方向スライスを導出することができる。1つのアプローチでは、推定システムは横方向スライスから個別に特徴を抽出し、それによって車線境界を更新する精度及び定義を高める。
【0005】
様々な実装形態では、ニューラルモデルは、集約された特徴のヒストグラムを使用して車線境界の信頼値及び境界配置を計算するデコーダを含む。さらに、推定システムは、信頼値及び境界配置を使用して、道路縁部に沿って車線境界を連結し、再結合することにより、マップを自動的に生成する。したがって、推定システムは、スライスされたデータを個別に処理し、スライスを連結することによって、更新されてより充実した車線境界によるマップを生成し、それによりマップ(例えば、HDマップ)の生成の精度及び効率が向上する。
【0006】
一実施形態では、マップを生成するために道路データとともにスライシングモデルを使用して車線境界を推定する推定システム、が開示される。本推定システムは、プロセッサによって実行されたときに、プロセッサに、走行車線に関連付けられる道路縁部に関する取得されたデータから、離散化された3D表現を計算させる命令、を記憶するメモリ、を含む。命令はまた、スライシングモデルを使用して道路縁部の離散的かつ横方向スライスを導出する命令を含み、道路縁部は、マップ化された領域を記述する道路グラフにおいて接続される。命令はまた、走行車線に関する車線境界を推定するためのヒストグラムを形成するためのニューラルモデルを使用して、横方向スライスから個別に特徴を抽出する命令を含む。命令はまた、道路縁部に沿って車線境界を個々に連結することによってマップを生成する命令も含む。
【0007】
一実施形態では、マップを生成するために道路データとともにスライシングモデルを使用して車線境界を推定し、プロセッサによって実行されたときにプロセッサに1つ又は複数の機能を実行させる命令を含む、非一時的コンピュータ可読媒体、が開示される。命令は、走行車線に関連付けられる道路縁部に関する取得されたデータから、離散化された3D表現を計算する命令を含む。命令はまた、スライシングモデルを使用して道路縁部の離散的かつ横方向スライスを導出する命令を含み、道路縁部は、マップ化された領域を記述する道路グラフにおいて接続される。命令はまた、走行車線に関する車線境界を推定するためのヒストグラムを形成するためにニューラルモデルを使用して、横方向スライスから個別に特徴を抽出する命令を含む。命令はまた、道路縁部に沿って車線境界を個々に連結することによってマップを生成する命令も含む。
【0008】
一実施形態では、マップを生成するために道路データとともにスライシングモデルを使用して車線境界を推定する方法が、開示される。一実施形態では、本方法は、走行車線に関連付けられる道路縁部に関する取得されたデータから、離散化された3D表現を計算することを含む。本方法はまた、スライシングモデルを用いて道路縁部の離散的かつ横方向スライスを導出することを含み、道路縁部は、マップ化された領域を記述する道路グラフにおいて接続される。本方法はまた、走行車線に関する車線境界を推定するためのヒストグラムを形成するためにニューラルモデルを使用して、横方向スライスから個々に特徴を抽出することを含む。本方法はまた、道路縁部に沿って車線境界を個々に連結することによってマップを生成することを含む。
【図面の簡単な説明】
【0009】
本明細書に組み込まれ、本明細書の一部を構成する添付の図面は、本開示の様々なシステム、方法、及び他の実施形態を示す。図の中で示された要素の境界(例えば、四角形、四角形のグループ、又は他の形状)は、境界の一実施形態を表すことが理解されよう。いくつかの実施形態では、1つの要素を複数の要素として設計してもよいし、複数の要素を1つの要素として設計してもよい。いくつかの実施形態では、別の要素の内部構成要素として示された要素が、外部構成要素として実装されてもよく、その逆も同様である。さらに、要素は正しい縮尺で描かれていないことがある。
【0010】
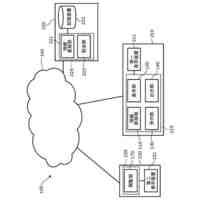
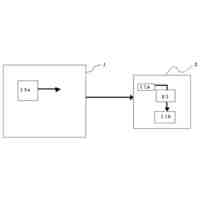
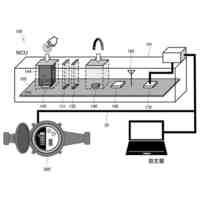
本明細書に開示されるシステム及び方法が内部に実施され得る車両の一実施形態を示す図である。
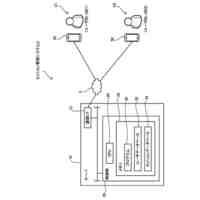
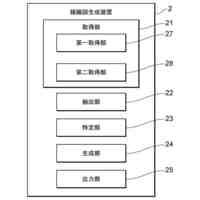
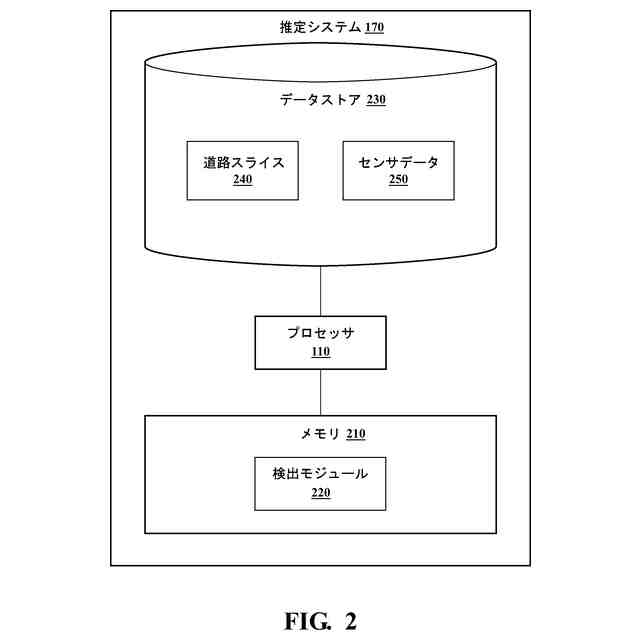
マップを生成するために道路データとともにスライシングモデルを使用する車線境界の推定に関連付けられる推定システムの一実施形態を示す図である。
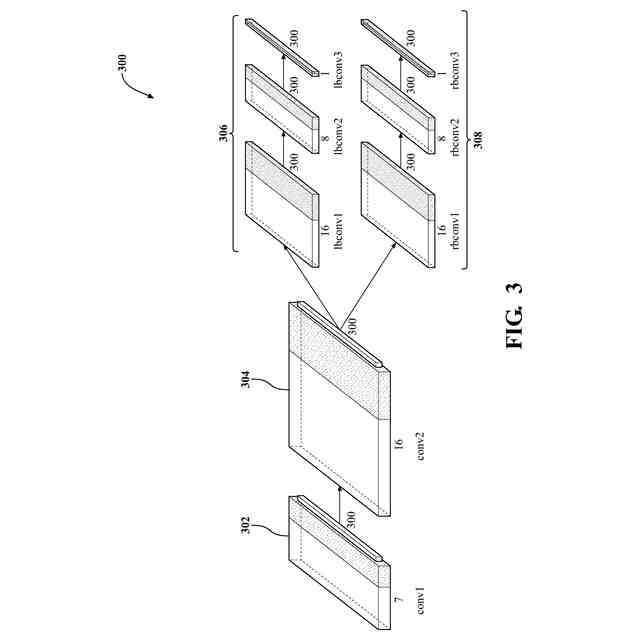
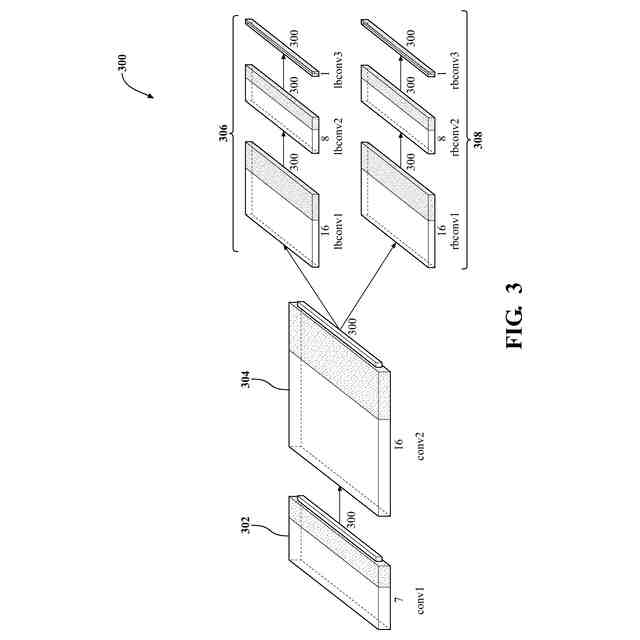
ニューラルモデルを使用して道路縁部のデータをスライスし、車線境界を推定する推定システムの一実施形態を示す図である。
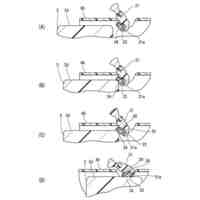
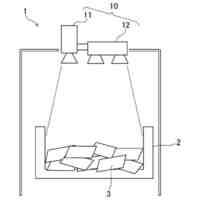
道路のスライス画像と、推定された車線境界を出力する推定システムの例を示す図である。
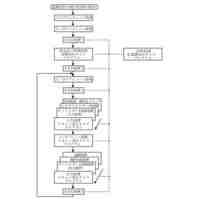
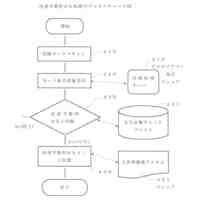
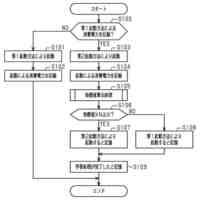
スライシングモデルと、マップを生成するためにスライスごとに特徴を抽出するニューラルモデルとを使用して車線境界を推定することに関連付けられる方法の一実施形態を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
対話装置
4日前
個人
情報処理装置
4日前
個人
政治のAI化
27日前
個人
物品給付年金
1か月前
個人
情報処理装置
今日
個人
プラグインホームページ
18日前
個人
情報入力装置
4日前
キヤノン株式会社
通信装置
1か月前
個人
物価スライド機能付生命保険
4日前
個人
マイホーム非電子入札システム
4日前
キヤノン株式会社
画像処理装置
25日前
個人
全アルゴリズム対応型プログラム
28日前
シャープ株式会社
電子機器
27日前
大同特殊鋼株式会社
輝線検出方法
27日前
個人
決済手数料0%のクレジットカード
7日前
サクサ株式会社
カードの制動構造
6日前
ミサワホーム株式会社
宅配ロッカー
24日前
トヨタ自動車株式会社
情報処理装置
10日前
村田機械株式会社
割当補助システム
10日前
株式会社アジラ
データ転送システム
27日前
トヨタ自動車株式会社
欠け検査装置
27日前
ミサワホーム株式会社
情報処理装置
1か月前
パテントフレア株式会社
交差型バーコード
20日前
長屋印刷株式会社
画像形成システム
1か月前
オベック実業株式会社
端末用スタンド
28日前
トヨタ自動車株式会社
管理装置
24日前
Sansan株式会社
組織図生成装置
13日前
応研株式会社
業務支援システム
18日前
株式会社ユピテル
電子機器及びプログラム等
1か月前
株式会社WellGo
個人情報利用方法
今日
株式会社mov
情報処理システム
4日前
株式会社カプコン
データおよびシステム
26日前
西日本電信電話株式会社
分析装置
19日前
西日本電信電話株式会社
評価装置
19日前
株式会社豆蔵
ピッキング装置
6日前
シャープ株式会社
通信装置
17日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ