TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025087545
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2023203345
出願日
2023-11-30
発明の名称
ピッキング装置
出願人
株式会社豆蔵
代理人
弁理士法人白坂
主分類
G06T
7/70 20170101AFI20250603BHJP(計算;計数)
要約
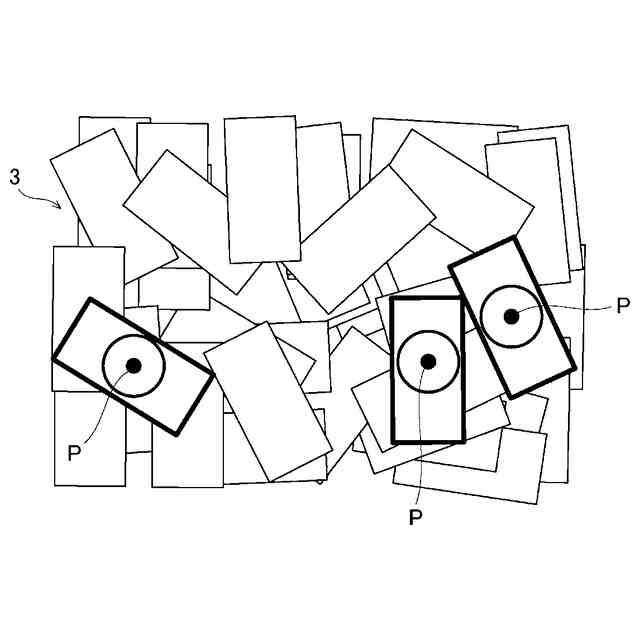
【課題】低価格で高精度なばら積みピッキングを実現できるピッキング装置を提供する。
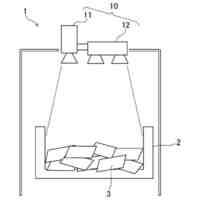
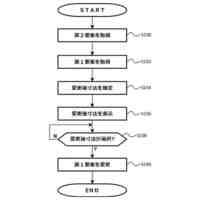
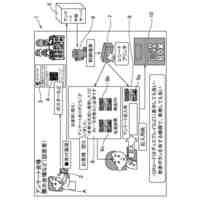
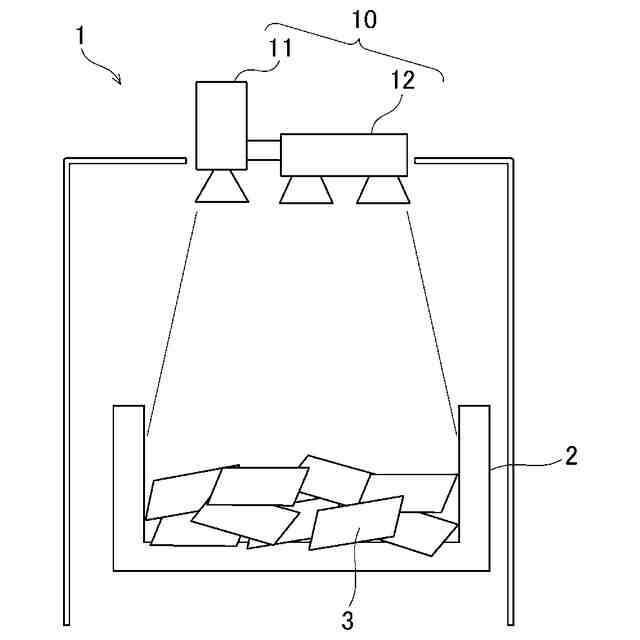
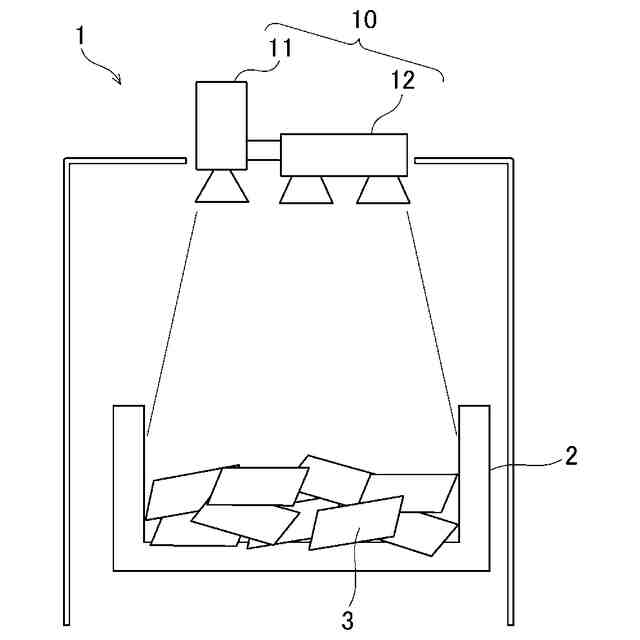
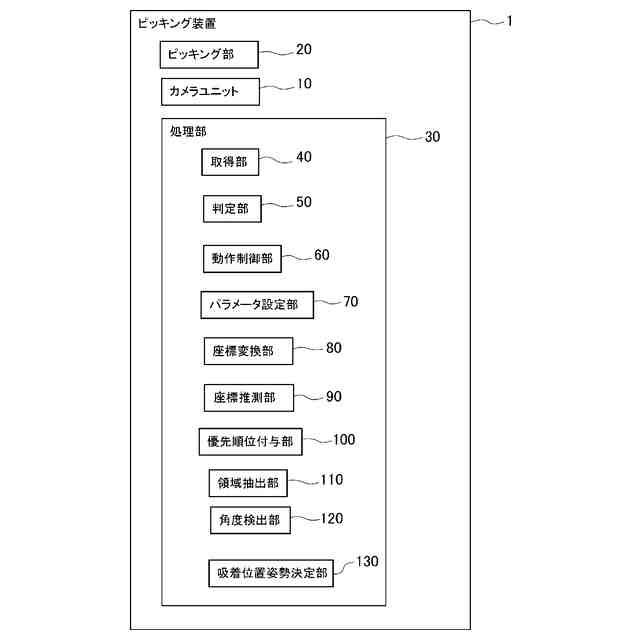
【解決手段】ばら積みピッキングを行うピッキング装置であって、所定領域内に存在する対象物をピッキングするピッキング部と、対象物を撮影する2Dカメラ及び3Dカメラを備えるカメラユニットと、カメラユニットが取得する画像から対象物を認識する処理部と、を備え、処理部は、画像より対象物に対応する領域の画像を分離して分離画像として取得する取得部と、分離画像における対象物が予め登録された対象物であるか否かを判定する判定部と、対象物が予め登録された対象物である場合に、ピッキング部に対し対象物をピッキングする動作制御を実行する動作制御部と、を備える。
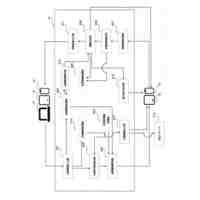
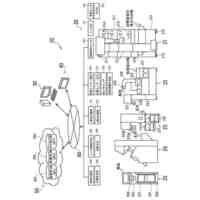
【選択図】図1
特許請求の範囲
【請求項1】
所定領域内に存在する対象物をピッキングするピッキング部と、
前記対象物を撮影する2Dカメラ及び3Dカメラを備えるカメラユニットと、
前記カメラユニットが取得する画像から前記対象物を認識する処理部と、を備え、
前記処理部は、
前記画像より前記対象物に対応する領域の画像を分離して分離画像として取得する取得部と、
前記分離画像における前記対象物が予め登録された対象物であるか否かを判定する判定部と、
前記対象物が予め登録された対象物である場合に、前記ピッキング部に対し前記対象物をピッキングする動作制御を実行する動作制御部と、を備える
ことを特徴とするピッキング装置。
続きを表示(約 1,000 文字)
【請求項2】
前記処理部は、
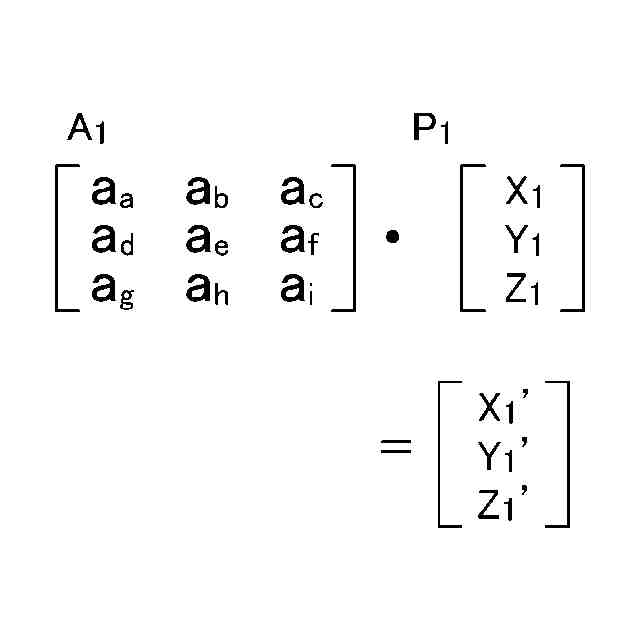
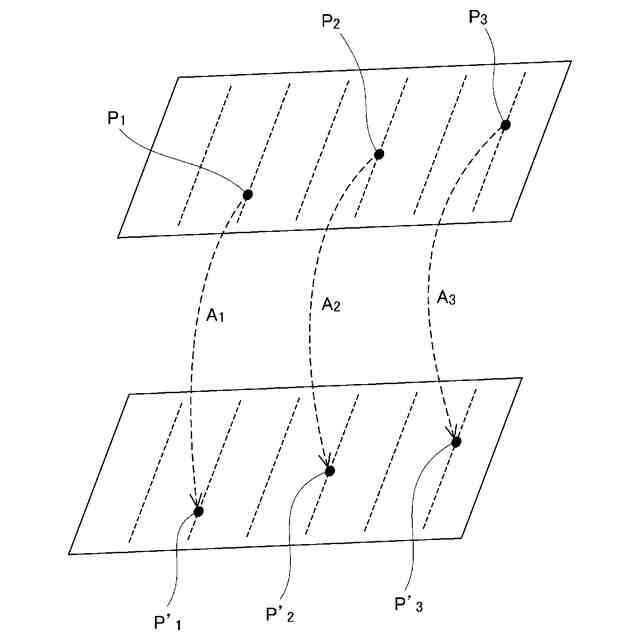
前記2Dカメラと前記3Dカメラとのステレオキャリブレーションを行い前記3Dカメラの撮影により生じる3D点群を前記2Dカメラの撮影により生じる平面画像内の対応位置に変換するための変換パラメータを設定するパラメータ設定部と、
前記パラメータを用いて前記3D点群を前記平面画像に座標変換する座標変換部と、
前記平面画像に座標変換された前記3D点群を前記平面画像上に投影し、前記2Dカメラの撮影により生じる平面画像上に投影される前記3D点群の空間座標を推測する座標推測部と、
をさらに備えることを特徴とする請求項1に記載のピッキング装置。
【請求項3】
前記対象物がばら積みされた小袋であることを特徴とする請求項1に記載のピッキング装置。
【請求項4】
前記認識部はAIを用いた画像処理を行うことを特徴とする請求項1に記載のピッキング装置。
前記パラメータ設定部は、前記2Dカメラと前記3Dカメラとのステレオキャリブレーションを行い前記3Dカメラの撮影により生じる3D点群を前記2Dカメラの撮影により生じる平面画像内の対応位置に変換するための変換パラメータをAIによる画像処理により設定することを特徴とする請求項1に記載のピッキング装置。
【請求項5】
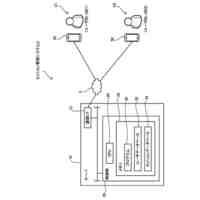
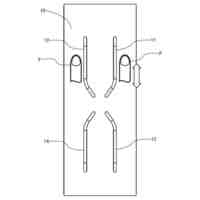
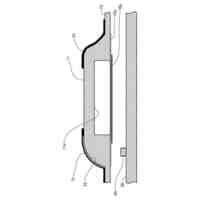
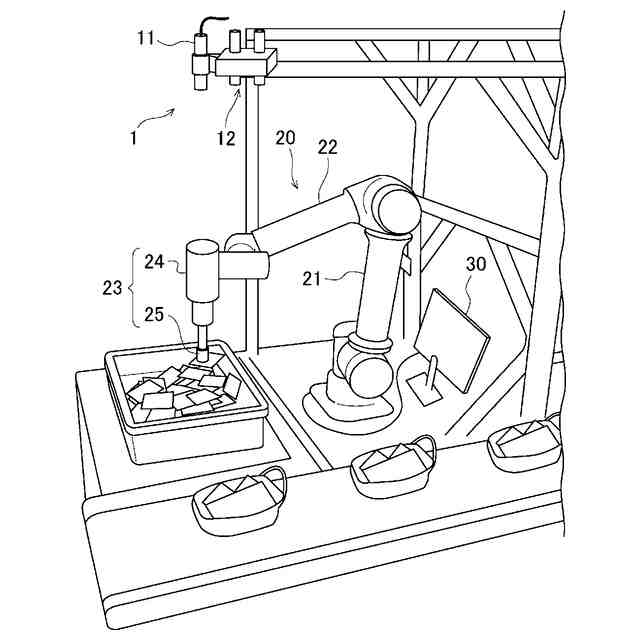
前記ピッキング部は、基部と、前記基部から延在するアーム部と、前記アーム部の先端に接続され、対象物を吸着する吸着部と、を備え、前記吸着部はその先端部に吸着パッドと、前記吸着パッドを陰圧にする吸引部と、を備えることを特徴とする請求項1に記載のピッキング装置。
【請求項6】
前記処理部は、
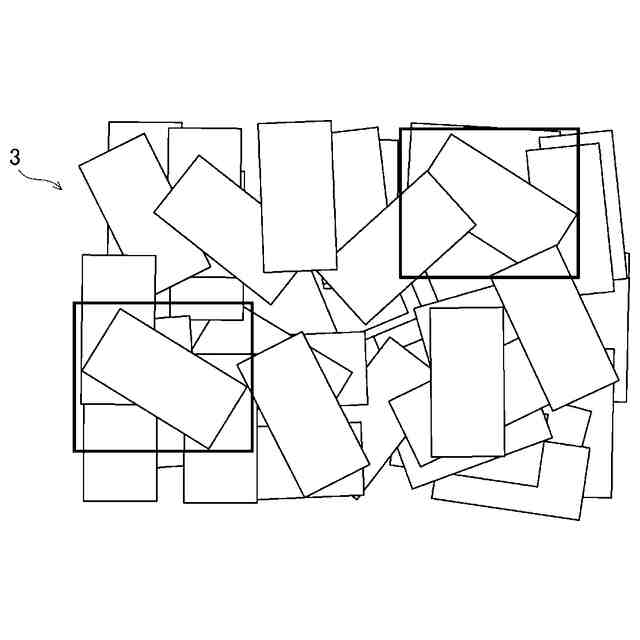
前記分離画像の面積が大きい順にピッキングをする優先順位をつける優先順位付与部と、
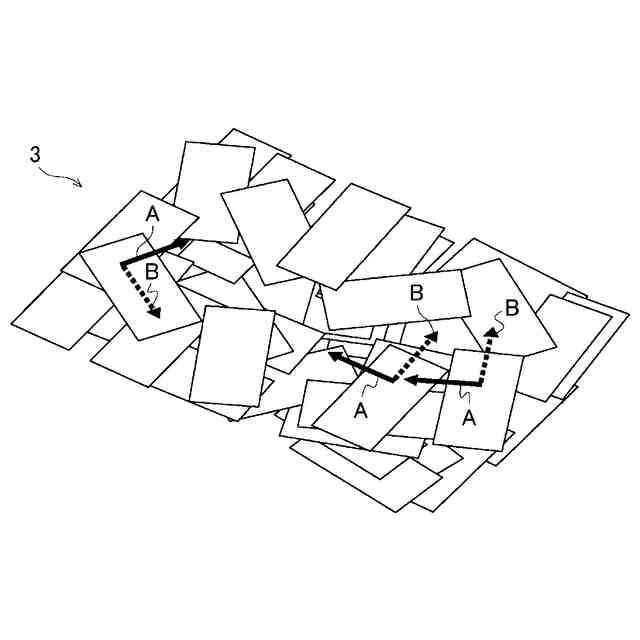
前記分離画像において前記吸着パッドが収まる画像領域を抽出し、前記画像領域の重心位置を前記吸着パッドが接触する際に平面座標の位置とする領域抽出部と、
前記領域抽出部により抽出された前記対象物の向きと、予め登録された前記対象物の画像における前記対象物の向きと、を比較し、向きのずれを前記対象物の高さ方向の垂線に対するずれの角度として検出する角度検出部と、
前記吸着パッドが前記対象物を吸着する吸着位置の空間座標を推測し、前記対象物の前記角度を適用し前記吸着パッドが前記対象物を吸着する位置及び姿勢を決定する吸着位置姿勢決定部と、
をさらに備えることを特徴とする請求項4に記載のピッキング装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ピッキング装置に関し、低価格で高精度なばら積みピッキングを実現できるピッキング装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来のばら積みピッキングは、一般的には3Dセンサが使用されていた。
【0003】
光パターンを標的面上に投影するために3次元距離センサを制御する処理システムを提供する技術が提案されている(特許文献1等参照)。
【0004】
特許文献1では、光パターンを標的面上に投影するために3次元距離センサを制御するステップと、前記標的面上の前記光パターンの第1画像を取得するために2次元カメラを制御するステップと、前記標的面上の前記光パターンの第2画像を取得するために前記3次元距離センサの受光システムを制御するステップと、前記複数の光点のうちの第1光点の2次元座標のセットを、前記第1光点に対して座標の単一セットを形成するために前記第1光点の3次元座標のセットの距離座標と関連付けるステップと、関係式を前記座標の単一セットから導出するステップと、を含む。
【先行技術文献】
【特許文献】
【0005】
特開2022-532725号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1の技術では、高価な3Dセンサが使用されているので、2Dカメラとのユニット全体としてコストがかかりすぎていた。
【0007】
本発明は前記の点に鑑みなされたものであり、低価格で高精度なばら積みピッキングを実現できるピッキング装置を提供する。
【課題を解決するための手段】
【0008】
すなわち、実施形態のピッキング装置は、ばら積みピッキングを行うピッキング装置であって、所定領域内に存在する対象物をピッキングするピッキング部と、対象物を撮影する2Dカメラ及び3Dカメラを備えるカメラユニットと、カメラユニットが取得する画像から対象物を認識する処理部と、を備え、処理部は、画像より対象物に対応する領域の画像を分離して分離画像として取得する取得部と、分離画像における対象物が予め登録された対象物であるか否かを判定する判定部と、対象物が予め登録された対象物である場合に、ピッキング部に対し対象物をピッキングする動作制御を実行する動作制御部と、を備えることを特徴とする。
【0009】
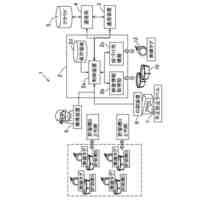
さらに、ピッキング装置において、処理部は、2Dカメラと3Dカメラとのステレオキャリブレーションを行い3Dカメラの撮影により生じる3D点群を2Dカメラの撮影により生じる平面画像内の対応位置に変換するための変換パラメータを設定するパラメータ設定部と、パラメータを用いて3D点群を平面画像に座標変換する座標変換部と、平面画像に座標変換された3D点群を平面画像上に投影し、2Dカメラの撮影により生じる平面画像上に投影される3D点群の空間座標を推測する座標推測部と、をさらに備えることとしてもよい。
【0010】
さらに、ピッキング装置において、対象物がばら積みされた小袋であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社豆蔵
ピッキング装置
2か月前
個人
対話装置
2か月前
個人
情報処理装置
2か月前
個人
裁判のAI化
1か月前
個人
フラワーコートA
10日前
個人
工程設計支援装置
2日前
個人
情報処理システム
1か月前
個人
検査システム
1か月前
個人
情報処理装置
2か月前
個人
記入設定プラグイン
1か月前
個人
介護情報提供システム
17日前
個人
携帯情報端末装置
3日前
個人
設計支援システム
23日前
個人
設計支援システム
23日前
株式会社サタケ
籾摺・調製設備
1か月前
個人
情報入力装置
2か月前
キヤノン電子株式会社
携帯装置
1か月前
個人
不動産売買システム
1か月前
株式会社カクシン
支援装置
26日前
個人
物価スライド機能付生命保険
2か月前
個人
マイホーム非電子入札システム
2か月前
個人
アンケート支援システム
12日前
個人
備蓄品の管理方法
1か月前
個人
ジェスチャーパッドのガイド部材
16日前
キヤノン株式会社
情報処理装置
1か月前
キヤノン株式会社
情報処理装置
1か月前
サクサ株式会社
中継装置
1か月前
サクサ株式会社
中継装置
13日前
株式会社BONNOU
管理装置
1か月前
株式会社アジラ
移動方向推定装置
11日前
株式会社寺岡精工
システム
16日前
株式会社ワコム
電子消去具
1か月前
個人
リテールレボリューションAIタグ
9日前
キヤノン電子株式会社
名刺管理システム
1か月前
東洋電装株式会社
操作装置
1か月前
東洋電装株式会社
操作装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ