TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025086317
公報種別
公開特許公報(A)
公開日
2025-06-06
出願番号
2024098063,2024536127
出願日
2024-06-18,2023-11-27
発明の名称
金属加工装置
出願人
ヤマザキマザック株式会社
代理人
個人
主分類
B23P
23/00 20060101AFI20250530BHJP(工作機械;他に分類されない金属加工)
要約
【課題】加工の効率化と、設置スペースの拡大抑制と、加工精度の維持とを実現可能な工作機械を提供する。
【解決手段】工作機械は、ワークを支持するテーブルを有するワーク支持装置と、ワークを加工する第1回転工具を支持可能な加工ヘッド、および、加工ヘッドを3次元的に移動させる複数の直動装置を有する第1加工装置と、第2回転工具を用いてワークを加工する第1ロボットと、第3回転工具を用いてワークを加工する第2ロボットと、加工室を規定する壁と、壁に形成されたワーク通過口を開閉するドアと、を具備する。ワーク支持装置は、第1軸まわりにテーブルを旋回させる第1駆動装置を有する。平面視において、第1加工装置とワーク通過口との間にワーク支持装置が配置され、ワーク支持装置の周囲に、ワーク通過口、第1ロボット、第1加工装置、および、第2ロボットが配置される。
【選択図】図19
特許請求の範囲
【請求項1】
ワークを支持するテーブルを有するワーク支持装置と、
前記テーブルによって支持される前記ワークを加工する第1回転工具を支持可能な加工ヘッド、および、前記加工ヘッドを3次元的に移動させる複数の直動装置を有する第1加工装置と、
第2回転工具の位置および向きを変更する多関節アームを有し、前記第2回転工具を用いて前記テーブルによって支持される前記ワークを加工する第1ロボットと、
第3回転工具の位置および向きを変更する第2多関節アームを有し、前記第3回転工具を用いて前記テーブルによって支持される前記ワークを加工する第2ロボットと、
加工室を規定する壁と、
前記壁に形成されたワーク通過口を開閉するドアと
を具備し、
前記ワーク支持装置は、第1軸まわりに前記テーブルを旋回させる第1駆動装置を有し、
平面視において、前記第1加工装置と前記ワーク通過口との間に前記ワーク支持装置が配置され、
平面視において、前記ワーク支持装置の周囲に、前記ワーク通過口、前記第1ロボット、前記第1加工装置、および、前記第2ロボットが配置される
工作機械。
続きを表示(約 1,300 文字)
【請求項2】
平面視において、前記第1ロボットと前記第2ロボットとの間に前記ワーク支持装置が配置される
請求項1に記載の工作機械。
【請求項3】
前記ワーク支持装置は、前記第1軸とは異なる第2軸まわりに前記テーブルを傾動させる第2駆動装置を有する
請求項1または2に記載の工作機械。
【請求項4】
前記第1加工装置は、前記第1回転工具を第1回転軸まわりに回転させる第1回転駆動装置を有し、
前記第1軸が前記第1回転軸に平行な方向に対して実質的に垂直に配置されているか、あるいは、前記第1軸が前記第1回転軸に平行な方向に対して実質的に垂直となるように前記テーブルを傾動可能である
請求項1または2に記載の工作機械。
【請求項5】
前記テーブルによって支持される前記ワークに向けてクーラント液を供給するクーラント液供給装置を具備し、
前記加工室には、前記加工ヘッド、および、前記多関節アームが配置される
請求項1または2に記載の工作機械。
【請求項6】
前記ワーク支持装置は、前記第1軸まわりの異なる複数の割出角度位置のそれぞれに、前記テーブルを割り出し可能であり、
平面視において、前記ワーク支持装置の周囲の異なる2つの角度位置に、それぞれ、前記第1ロボット、および、前記第1加工装置が配置される
請求項1または2に記載の工作機械。
【請求項7】
前記ワーク支持装置は、前記第1軸まわりの異なる複数の割出角度位置のそれぞれに、前記テーブルを割り出し可能であり、
平面視において、前記ワーク支持装置の周囲の異なる3つの角度位置に、それぞれ、前記第1ロボット、前記第1加工装置、および、前記ワーク通過口が配置される
請求項1または2に記載の工作機械。
【請求項8】
平面視において、前記第1加工装置から前記ワーク支持装置に向かう方向を第1方向と定義するとき、前記テーブルおよび前記第1駆動装置を含むテーブル装置を前記第1方向に平行な方向に移動させる第3駆動装置を具備する
請求項1または2に記載の工作機械。
【請求項9】
前記テーブル装置は、少なくとも進出位置と退避位置との間で、前記第1方向に平行な方向に移動可能であり、
前記進出位置は、前記第1加工装置を用いて前記テーブルによって支持される前記ワークを加工可能な位置であり、
前記退避位置は、前記テーブルに支持される前記ワークを、前記第1加工装置に干渉させることなく前記第1軸まわりに旋回させることが可能な位置である
請求項8に記載の工作機械。
【請求項10】
平面視において、前記第1加工装置から前記ワーク支持装置に向かう方向を第1方向と定義するとき、前記第1加工装置を前記第1方向に平行な方向に移動させる第4駆動装置を具備する
請求項1または2に記載の工作機械。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、工作機械に関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
生産効率向上のため、複数の加工ヘッドを有する工作機械を用いることが知られている。
【0003】
関連する技術として、特許文献1には、マシニングセンタが開示されている。特許文献1に記載のマシニングセンタは、第1加工ヘッドと、第2加工ヘッドとを有する。
【0004】
また、特許文献2には、機械加工システムが開示されている。特許文献2に記載の機械加工システムは、複数の軌道モジュールを接続して形成されたプラットフォームと、プラットフォームの軌道上を移動する複数の加工ユニットとを備える。
【先行技術文献】
【特許文献】
【0005】
特開2000-296429号公報
特開2023-134393号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の目的は、加工の効率化と、設置スペースの拡大抑制と、加工精度の維持とを実現可能な工作機械を提供することである。
【課題を解決するための手段】
【0007】
いくつかの実施形態における工作機械は、ワークを支持するテーブルを有するワーク支持装置と、前記テーブルによって支持される前記ワークを加工する第1回転工具を支持可能な加工ヘッド、および、前記加工ヘッドを3次元的に移動させる複数の直動装置を有する第1加工装置と、第2回転工具の位置および向きを変更する多関節アームを有し、前記第2回転工具を用いて前記テーブルによって支持される前記ワークを加工する第1ロボットと、第3回転工具の位置および向きを変更する第2多関節アームを有し、前記第3回転工具を用いて前記テーブルによって支持される前記ワークを加工する第2ロボットと、加工室を規定する壁と、前記壁に形成されたワーク通過口を開閉するドアと、を具備する。前記ワーク支持装置は、第1軸まわりに前記テーブルを旋回させる第1駆動装置を有する。平面視において、前記第1加工装置と前記ワーク通過口との間に前記ワーク支持装置が配置される。平面視において、前記ワーク支持装置の周囲に、前記ワーク通過口、前記第1ロボット、前記第1加工装置、および、前記第2ロボットが配置される。
【発明の効果】
【0008】
本発明により、加工の効率化と、設置スペースの拡大抑制と、加工精度の維持とを実現可能な工作機械を提供することができる。
【図面の簡単な説明】
【0009】
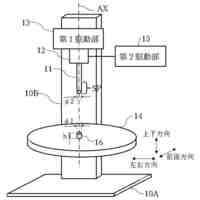
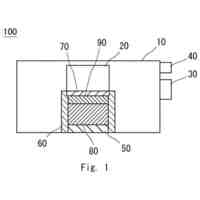
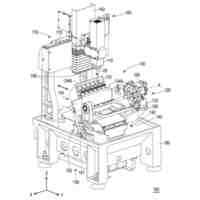
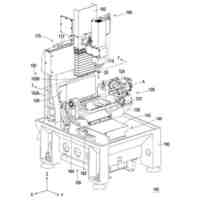
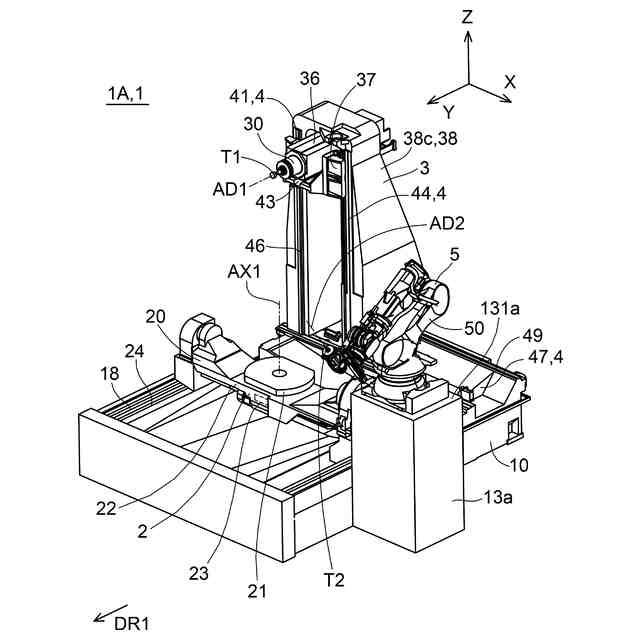
図1は、第1の実施形態における工作機械を模式的に示す概略斜視図である。
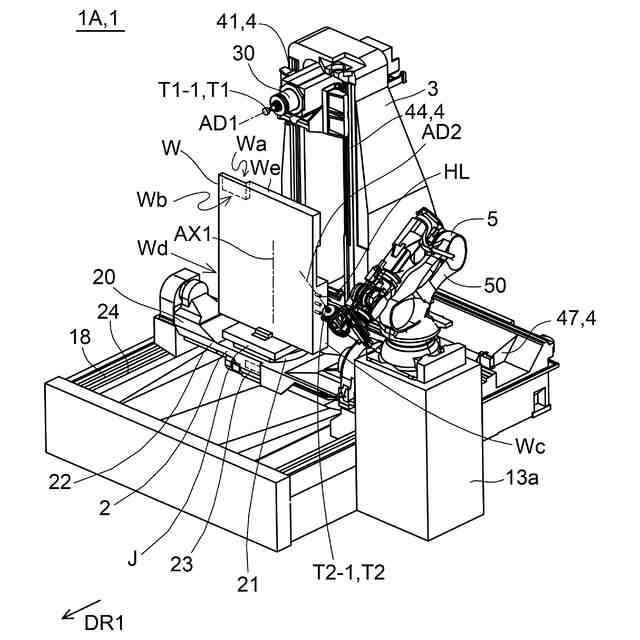
図2は、第1の実施形態における工作機械を模式的に示す概略斜視図である。
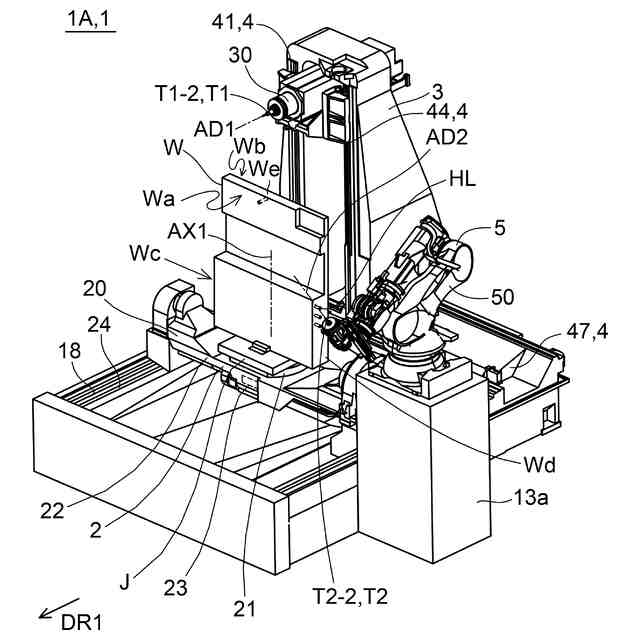
図3は、第1の実施形態における工作機械を模式的に示す概略斜視図である。
図4は、第1の実施形態における工作機械を模式的に示す概略平面図である。
図5は、第1の実施形態における工作機械を模式的に示す概略平面図である。
図6は、第1の実施形態における工作機械を模式的に示す概略平面図である。
図7は、第1の実施形態における工作機械を模式的に示す概略平面図である。
図8は、第1の実施形態の第1変形例における工作機械を模式的に示す概略平面図である。
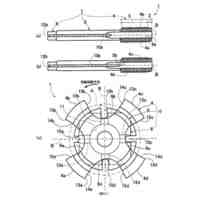
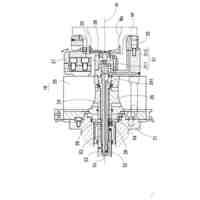
図9は、加工ヘッドの一部分を模式的に示す概略側面図である。
図10は、第1ロボットおよび支持台の一例を模式的に示す概略斜視図である。
図11は、多関節アームに取り付けられる工具支持装置の一例を拡大して示す概略斜視図である。
図12は、第1の実施形態における工作機械を模式的に示す概略平面図である。
図13は、第1の実施形態の第2変形例における工作機械を模式的に示す概略平面図である。
図14は、第1の実施形態におけるワーク加工方法の一例を示すフローチャートである。
図15は、第1の実施形態におけるワーク加工方法の他の一例を示すフローチャートである。
図16は、第1の実施形態における工作機械を模式的に示す概略平面図である。
図17は、第2の実施形態における工作機械を模式的に示す概略斜視図である。
図18は、変形例における加工ヘッドを模式的に示す概略側面図である。
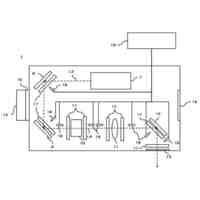
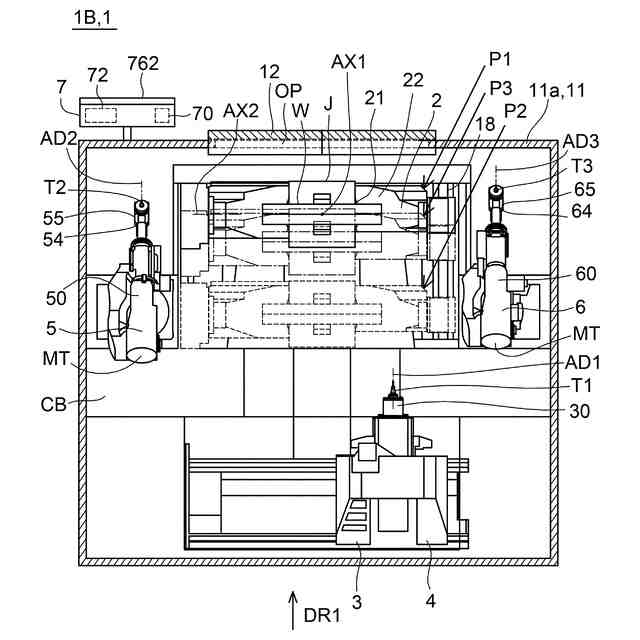
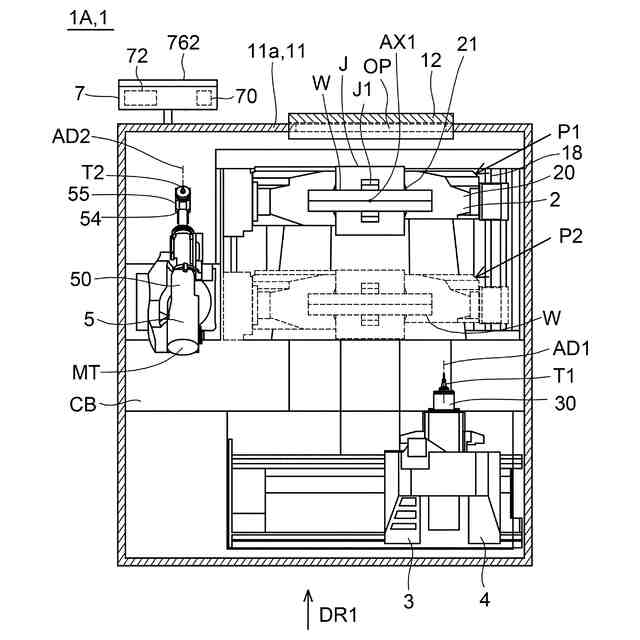
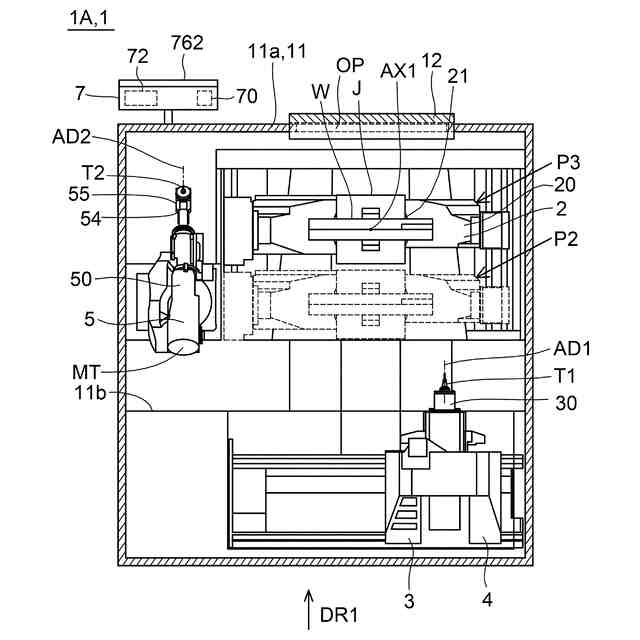
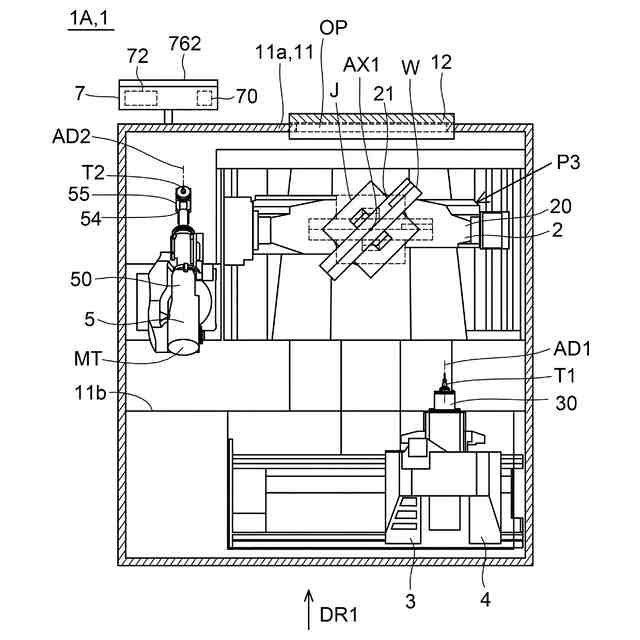
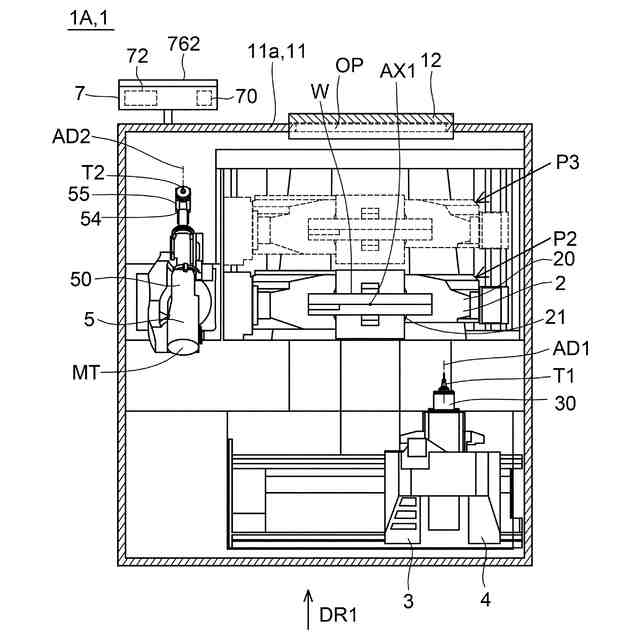
図19は、第2の実施形態における工作機械を模式的に示す概略平面図である。
図20は、第2ロボットおよび支持台の一例を模式的に示す概略斜視図である。
図21は、第2多関節アームに取り付けられる第2工具支持装置の一例を拡大して示す概略斜視図である。
図22は、第2の実施形態における工作機械システムを模式的に示す概略平面図である。
図23は、第2の実施形態における工作機械を模式的に示す概略平面図である。
図24は、少なくとも1つの工具交換装置が、加工ヘッドに支持された第1回転工具を他の第1回転工具に交換可能な様子を模式的に示す図である。
図25は、少なくとも1つの工具交換装置が、第1ロボットの工具支持装置に支持された第2回転工具を他の第2回転工具に交換可能な様子を模式的に示す図である。
図26は、少なくとも1つの工具交換装置が、第2ロボットの第2工具支持装置に支持された第3回転工具を他の第3回転工具に交換可能な様子を模式的に示す図である。
図27は、第2の実施形態における工作機械を模式的に示す概略斜視図である。
図28は、第2の実施形態における工作機械を模式的に示す概略斜視図である。
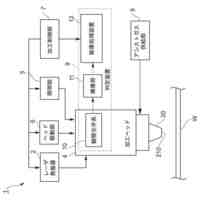
図29は、制御装置が複数の制御対象機器を制御可能な様子を模式的に示す図である。
図30は、ワーク加工方法の一工程が実行されている様子を拡大して示す概略斜視図である。
図31は、ワーク加工方法の一工程が実行されている様子を拡大して示す概略斜視図である。
図32は、ワーク加工方法の一工程が実行されている様子を拡大して示す概略斜視図である。
図33は、ワーク加工方法の一工程が実行されている様子を拡大して示す概略斜視図である。
図34は、ワーク加工方法の一工程が実行されている様子を拡大して示す概略斜視図である。
図35は、ワーク加工方法の一工程が実行されている様子を拡大して示す概略斜視図である。
図36は、ワーク加工方法の一工程が実行されている様子を拡大して示す概略斜視図である。
図37は、第2の実施形態におけるワーク加工方法の一例を示すフローチャートである。
図38は、第2の実施形態におけるワーク加工方法の他の一例を示すフローチャートである。
図39は、可動壁の一部分を拡大して示す概略正面図である。
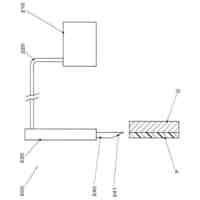
図40は、第1加工装置と第1ロボットとの間の配置関係の一例を模式的に示す概略平面図である。
図41は、第1加工装置と第1ロボットとの間の配置関係の一例を模式的に示す概略平面図である。
図42は、第1加工装置と第1ロボットと第2ロボットとの間の配置関係の一例を模式的に示す概略平面図である。
図43は、第1加工装置と第1ロボットと第2ロボットとの間の配置関係の一例を模式的に示す概略平面図である。
図44は、第1加工装置と第1ロボットとの間の配置関係の一例を模式的に示す概略平面図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して、実施形態における工作機械1、および、ワーク加工方法について説明する。なお、以下の実施形態の説明において、同一の機能を有する部位、部材については同一の符号を付し、同一の符号が付された部位、部材についての繰り返しとなる説明は省略する。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
タップ
1か月前
個人
加工機
29日前
麗豊実業股フン有限公司
ラクトバチルス・パラカセイNB23菌株及びそれを筋肉量の増加や抗メタボリック症候群に用いる用途
22日前
日東精工株式会社
ねじ締め機
2か月前
株式会社北川鉄工所
回転装置
1日前
株式会社不二越
ドリル
28日前
日東精工株式会社
ねじ締め機
14日前
株式会社不二越
ドリル
1か月前
有限会社 ナプラ
金属粒子
2か月前
日東精工株式会社
多軸ねじ締め機
2か月前
株式会社FUJI
工作機械
2か月前
株式会社アンド
半田付け方法
28日前
株式会社アンド
半田付け方法
28日前
エフ・ピー・ツール株式会社
リーマ
1か月前
日進工具株式会社
エンドミル
1か月前
株式会社ダイヘン
多層盛り溶接方法
1か月前
トヨタ自動車株式会社
接合方法
1か月前
村田機械株式会社
レーザ加工機
15日前
村田機械株式会社
レーザ加工機
15日前
ブラザー工業株式会社
工作機械
2か月前
ブラザー工業株式会社
工作機械
2か月前
株式会社FUJI
チャック装置
2か月前
株式会社トヨコー
被膜除去方法
16日前
株式会社コスメック
クランプ装置
2か月前
株式会社不二越
管用テーパタップ
2か月前
株式会社コスメック
クランプ装置
2か月前
トヨタ自動車株式会社
溶接ヘッド
2日前
大肯精密株式会社
自動送り穿孔機
1か月前
ビアメカニクス株式会社
レーザ加工装置
2か月前
株式会社ダイヘン
溶接装置
1か月前
株式会社プロテリアル
金属箔の溶接方法
2か月前
オークマ株式会社
工作機械
2か月前
株式会社不二越
超硬合金製ドリル
1か月前
津田駒工業株式会社
2連回転割出し装置
2か月前
トヨタ自動車株式会社
溶接ヘッド
1日前
トヨタ自動車株式会社
レーザ加工機
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ