TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025084299
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2023198088
出願日
2023-11-22
発明の名称
車両の制動制御装置
出願人
株式会社アドヴィックス
代理人
個人
,
個人
主分類
B60T
13/122 20060101AFI20250527BHJP(車両一般)
要約
【課題】電気モータにより液圧を調整する車両の制動制御装置において、液圧-液量特性を表す変換マップの誤差を補償すること。
【解決手段】車両の制動制御装置は、制御ピストンが挿入され、電気モータにより該制御ピストンを移動することでサーボ圧を発生する制御シリンダと、サーボ圧を検出するサーボ圧センサと、サーボ圧に基づいて電気モータを制御するコントローラと、を備え、サーボ圧によりホイールシリンダのホイール圧を調整する。そして、コントローラは、制御シリンダからの吐出液量を取得し、サーボ圧、及び変換マップに基づいて推定液量を演算し、吐出液量と推定液量との偏差に基づいて電気モータを制御する。例えば、コントローラは、制動要求量に基づいて目標圧を演算し、目標圧、及び変換マップに基づいて規範液量を演算し、規範液量、及び偏差に基づいて電気モータの回転角を制御する。
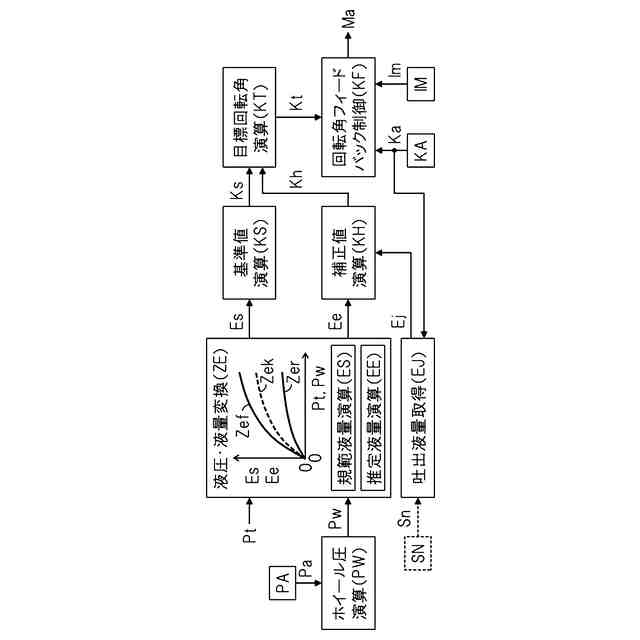
【選択図】図3
特許請求の範囲
【請求項1】
制御ピストンが挿入され、電気モータにより該制御ピストンを移動することでサーボ圧を発生する制御シリンダと、前記サーボ圧を検出するサーボ圧センサと、前記サーボ圧に基づいて前記電気モータを制御するコントローラと、を備え、前記サーボ圧によりホイールシリンダのホイール圧を調整する、車両の制動制御装置において、
前記コントローラは、前記制御シリンダからの吐出液量を取得し、前記サーボ圧、及び変換マップに基づいて推定液量を演算し、前記吐出液量と前記推定液量との偏差に基づいて前記電気モータを制御する、車両の制動制御装置。
続きを表示(約 260 文字)
【請求項2】
請求項1に記載される車両の制動制御装置において、
前記コントローラは、制動要求量に基づいて目標圧を演算し、前記目標圧、及び前記変換マップに基づいて規範液量を演算し、前記規範液量、及び前記偏差に基づいて前記電気モータの回転角を制御する、車両の制動制御装置。
【請求項3】
請求項1又は請求項2に記載される車両の制動制御装置において、
前記コントローラは、前記ホイールシリンダに流入した制動液の体積と前記ホイール圧との関係を前記変換マップとして設定する、車両の制動制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両の制動制御装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1には、負荷液損特性が変化した場合に、ブレーキペダル操作量に応じた制動力を変化させて運転者に負荷液損特性の変化を認識させ得るよう、モータ駆動シリンダ13と、ホイールシリンダ2b・3bと、ブレーキペダル操作量Psを検出するストロークセンサ11aと、ブレーキペダル操作量Psに応じて、モータ駆動シリンダ13の目標ストロークStを設定する目標値設定回路33と、ブレーキペダル操作量Psに対応するブレーキ液圧規範値Boと実ブレーキ液圧Bと間に偏差が生じたときに、該偏差を減少させる向きに、目標ストロークStを補正するための液圧補償回路38とを有する車両用のブレーキ装置1において、ブレーキペダル操作量Psに基づき液圧補償回路38による補償値ΔBを抑制するストローク制限回路51を設ける、ことが記載されている。
【0003】
ところで、特許文献1の装置では、目標値設定回路33にて、マップ等が用いられて、補正ブレーキ液圧Btに対応してモータ駆動シリンダ13の目標ストロークStが求められる。ここで、液圧から電動シリンダのストローク(即ち、電動シリンダから吐出される制動液の液量)への変換マップは、ホイールシリンダの液圧とホイールシリンダに供給された制動液(作動流体)の液量との関係を表している。該関係は、「液圧-液量特性」と称呼される。液圧-液量特性は、基本的には、ブレーキキャリパ、摩擦部材等の剛性によって定まるが、そこには、バラツキ、経年変化等の誤差が含まれている。これらの誤差は、装置内の気体の有無、摩擦部材の摩耗等に起因する。
【先行技術文献】
【特許文献】
【0004】
国際公開第2012/086162号
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記課題を鑑み、本発明の目的は、電気モータにより液圧を調整する車両の制動制御装置において、液圧-液量特性を表す変換マップの誤差が補償され得るものを提供することである。
【課題を解決するための手段】
【0006】
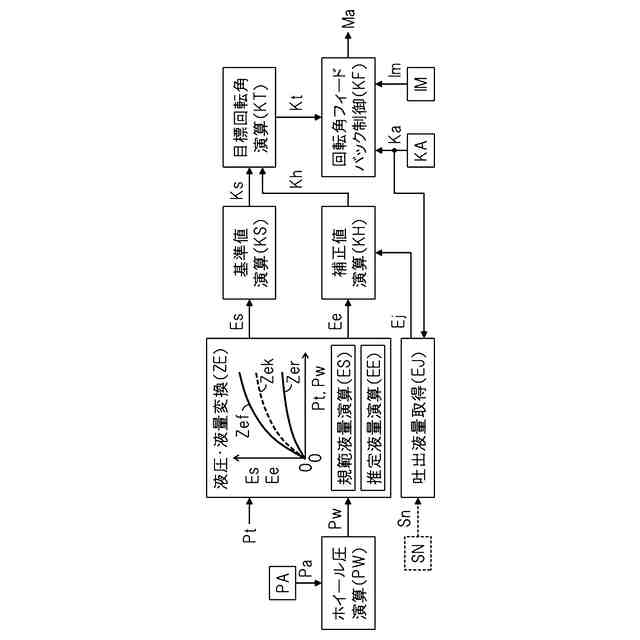
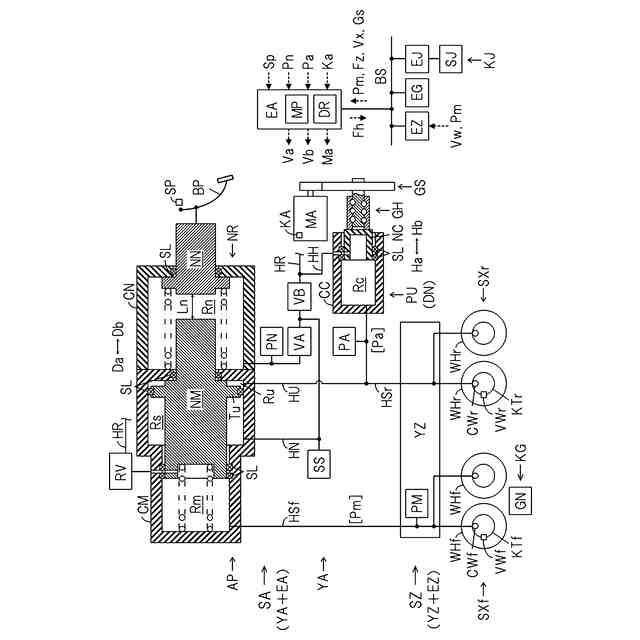
本発明に係る車両の制動制御装置(SA)は、制御ピストン(NC)が挿入され、電気モータ(MA)により該制御ピストン(NC)を移動することでサーボ圧(Pa)を発生する制御シリンダ(CC)と、前記サーボ圧(Pa)を検出するサーボ圧センサ(PA)と、前記サーボ圧(Pa)に基づいて前記電気モータ(MA)を制御するコントローラ(EA)と、を備え、前記サーボ圧(Pa)によりホイールシリンダ(CW)のホイール圧(Pw)を調整する。そして、前記コントローラ(EA)は、前記制御シリンダ(CC)からの吐出液量(Ej)を取得し、前記サーボ圧(Pa)、及び変換マップ(Zef、Zer、Zek)に基づいて推定液量(Ee)を演算し、前記吐出液量(Ej)と前記推定液量(Ee)との偏差(hE)に基づいて前記電気モータ(MA)を制御する。
【0007】
本発明に係る車両の制動制御装置(SA)では、前記コントローラ(EA)は、制動要求量(Bs)に基づいて目標圧(Pt)を演算し、前記目標圧(Pt)、及び前記変換マップ(Zef、Zer、Zek)に基づいて規範液量(Es)を演算し、前記規範液量(Es)、及び前記偏差(hE)に基づいて前記電気モータ(MA)の回転角(Ka)を制御する。また、前記コントローラ(EA)は、前記ホイールシリンダ(CW)に流入した制動液の体積と前記ホイール圧(Pw)との関係を前記変換マップ(Zef、Zer、Zek)として設定する。
【0008】
液圧-液量特性を表す変換マップZef、Zer、Zekには誤差が含まれるが、上記構成によれば、該誤差が適切に補償され得る。これにより、制御シリンダCCから吐出される制動液BFの体積が、目標圧Ptに対して、過不足なく調整されるため、電気モータMAにより駆動される制御シリンダCC(即ち、電動シリンダDN)による調圧精度が向上される。
【図面の簡単な説明】
【0009】
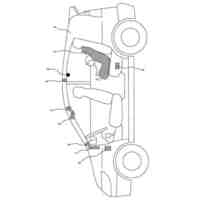
車両の制動制御装置SAの第1の実施形態を説明するための概略図である。
調圧制御の処理を説明するためのフロー図である。
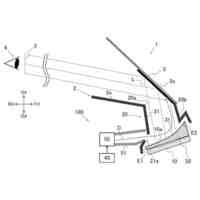
電動シリンダDNの駆動制御を説明するためのブロック図である。
車両の制動制御装置SAの第2の実施形態を説明するための概略図である。
【発明を実施するための形態】
【0010】
<構成部材等の記号、及び記号末尾の添字>
以下の説明において、「CW」等の如く、同一記号を付された構成部材、演算処理、信号、特性、及び値は、同一機能のものである。各車輪に係る記号末尾に付された添字「f」、「r」は、それが前後車輪の何れの系統に関するものであるかを示す包括記号である。例えば、各車輪に設けられたホイールシリンダCWにおいて、「前輪ホイールシリンダCWf、後輪ホイールシリンダCWr」と表記される。更に、記号末尾の添字「f」、「r」は省略され得る。添字「f」、「r」が省略された場合には、各記号はその総称を表す。例えば、「CW」は、車両の前後車輪に設けられたホイールシリンダの総称である。また、総称としての「CW」は、「CW(=CWf、CWr)」とも表記される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
3か月前
個人
カーテント
5日前
個人
警告装置
1か月前
個人
車窓用防虫網戸
26日前
個人
眼科手術車
5か月前
個人
小型EVシステム
1か月前
個人
授乳用車両
4か月前
個人
車輪清掃装置
9日前
日本精機株式会社
ケース
2か月前
井関農機株式会社
作業車両
4か月前
日本精機株式会社
照明装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
個人
アンチロール制御装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
5か月前
個人
ブレーキシステム
2か月前
個人
ワイパーゴム性能保持具
18日前
株式会社松華
懸架装置
2か月前
個人
台車用車輪止め具
5か月前
個人
謝意シグナル装着車
5か月前
個人
自動車ドア開度規制ベルト
1か月前
株式会社クラベ
ヒータユニット
24日前
個人
自走式立体型洗車場
2か月前
横浜ゴム株式会社
タイヤ
2か月前
日本精機株式会社
車載表示装置
5か月前
井関農機株式会社
収穫作業車両
25日前
個人
ステージカー
2か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
5か月前
日本精機株式会社
車両用表示装置
20日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ