TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025083454
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2025037253,2023172445
出願日
2025-03-10,2018-03-27
発明の名称
情報処理装置、地図データ生成装置、方法及びプログラム
出願人
パイオニア株式会社
代理人
個人
主分類
G01C
21/28 20060101AFI20250523BHJP(測定;試験)
要約
【課題】自己位置推定に用いるべきオブジェクトを事前に把握するための事前情報を含む地図データを提供する。
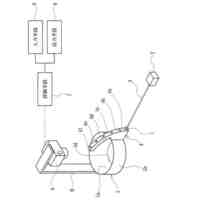
【解決手段】車載機1は、車両に搭載されたライダ2により計測したオブジェクトの計測値と、地図DB10に含まれるオブジェクトの位置情報とに基づき位置推定を行う。地図DB10には、位置推定に対するオブジェクトごとの推奨値を示すオブジェクト推奨情報又は位置推定に対するボクセルごとの推奨値を示すボクセル推奨情報が含まれている。
【選択図】図6
特許請求の範囲
【請求項1】
移動体周辺の物体を検出する検出部と、
前記移動体の推定位置を取得する第一取得部と、
前記推定位置周辺の物体の位置情報と、前記移動体の位置推定を行うことに対する推奨値を示す推奨値情報と、を含む地図情報を取得する第二取得部と、
前記検出部が検出した前記物体の検出結果と、前記推定位置と、前記地図情報に含まれる当該物体の位置情報と、に基づき、前記移動体の位置を推定する位置推定部と、
を備え、
前記位置推定部は、前記推奨値情報に基づいた重み付け演算により、前記移動体の位置を推定することを特徴とする情報処理装置。
続きを表示(約 1,300 文字)
【請求項2】
前記推奨値情報は、前記移動体の位置推定における方向ごとの推奨値を有し、
前記位置推定部は、前記方向ごとの推奨値情報に基づき、前記移動体を基準とした方向ごとの重み付け演算により、前記移動体の位置を推定する請求項1に記載の情報処理装置。
【請求項3】
前記推奨値情報は、前記移動体の位置推定における方位の推奨値をさらに有し、
前記位置推定部は、前記方位の推奨値情報に基づき、前記移動体を基準とした方位の重み付け演算により、前記移動体の位置を推定する請求項2に記載の情報処理装置。
【請求項4】
前記地図情報は、単位領域ごとに、物体の位置情報と、前記推奨値情報と、を含み、
前記位置推定部は、前記単位領域ごとの推奨値情報に基づいた重み付け演算により、前記移動体の位置を推定する請求項1に記載の情報処理装置。
【請求項5】
物体の位置情報と、移動体に搭載された計測装置により計測した前記物体との位置関係を用いて前記移動体の位置推定を行うことに対する推奨値を示す情報であって、前記位置推定の重み付け演算に用いられる推奨値情報と、を含む地図データを記憶する記憶部を有する情報処理装置。
【請求項6】
物体の識別情報と、前記物体を用いた前記移動体の位置推定の精度向上の有効性に関する有効性情報とに基づき生成された、前記物体を用いた前記移動体の位置推定に対する推奨値を示す情報であって、前記位置推定の重み付け演算に用いられる推奨値情報を、前記物体の位置情報と関連付けて、地図データを生成する生成部を有する地図データ生成装置。
【請求項7】
コンピュータが実行する方法であって、
移動体周辺の物体を検出する検出工程と、
前記移動体の推定位置を取得する第一取得工程と、
前記推定位置周辺の物体の位置情報と、前記移動体の位置推定を行うことに対する推奨値を示す推奨値情報と、を含む地図情報を取得する第二取得工程と、
前記検出工程により検出された前記物体の検出結果と、前記推定位置と、前記地図情報に含まれる当該物体の位置情報と、に基づき、前記移動体の位置を推定する位置推定工程と、
を有し、
前記位置推定工程は、前記推奨値情報に基づいた重み付け演算により、前記移動体の位置を推定することを特徴とする方法。
【請求項8】
移動体周辺の物体を検出する検出部と、
前記移動体の推定位置を取得する第一取得部と、
前記推定位置周辺の物体の位置情報と、前記移動体の位置推定を行うことに対する推奨値を示す推奨値情報と、を含む地図情報を取得する第二取得部と、
前記検出部が検出した前記物体の検出結果と、前記推定位置と、前記地図情報に含まれる当該物体の位置情報と、に基づき、前記移動体の位置を推定する位置推定部
としてコンピュータを機能させ、
前記位置推定部は、前記推奨値情報に基づいた重み付け演算により、前記移動体の位置を推定することを特徴とするプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自己位置推定技術に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
従来から、車両の進行先に設置される地物をレーダやカメラを用いて検出し、その検出結果に基づいて自車位置を校正する技術が知られている。例えば、特許文献1には、計測センサの出力と、予め地図上に登録された地物の位置情報とを照合させることで自己位置を推定する技術が開示されている。また、特許文献2には、カルマンフィルタを用いた自車位置推定技術が開示されている。さらに、非特許文献1には、車両側のセンサが検出したデータをクラウドサーバで収集するためのデータフォーマットに関する仕様が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2013-257742号公報
特開2017-72422号公報
【非特許文献】
【0004】
here社ホームページ、Vehicle Sensor Data Cloud Ingestion Interface Specification(v2.0.2),[平成30年3月2日検索]、インターネット<URL:https://lts.cms.here.com/static-cloud-content/Company_Site/2015_06/Vehicle_Sensor_Data_Cloud_Ingestion_Interface_Specification.pdf>
【発明の概要】
【発明が解決しようとする課題】
【0005】
ライダなどの外界センサによる自車位置周辺のオブジェクトに対する計測結果と地図上のオブジェクトの位置情報とを照合して自車位置推定を行う場合、他車両によるオクルージョンや雨又は雪の影響で対象のオブジェクトが検出できないと、自車位置推定精度の悪化が生じる。同様に、オブジェクト自体の位置や形状が変化した場合も、地図上のオブジェクトの位置との不整合により照合結果がずれてしまい、自車位置推定精度の悪化が生じる。
【0006】
本発明は、上記のような課題を解決するためになされたものであり、自己位置推定に用いるべきオブジェクトを事前に把握するための事前情報を含む地図データを提供することを主な目的とする。
【課題を解決するための手段】
【0007】
請求項に記載の発明は、情報処理装置であって、移動体周辺の物体を検出する検出部と、前記移動体の推定位置を取得する第一取得部と、前記推定位置周辺の物体の位置情報と、前記移動体の位置推定を行うことに対する推奨値を示す推奨値情報と、を含む地図情報を取得する第二取得部と、前記検出部が検出した前記物体の検出結果と、前記推定位置と、前記地図情報に含まれる当該物体の位置情報と、に基づき、前記移動体の位置を推定する位置推定部と、を備え、前記位置推定部は、前記推奨値情報に基づいた重み付け演算により、前記移動体の位置を推定する。
【0008】
また、請求項に記載の発明は、情報処理装置であって、物体の位置情報と、移動体に搭載された計測装置により計測した前記物体との位置関係を用いて前記移動体の位置推定を行うことに対する推奨値を示す情報であって、前記位置推定の重み付け演算に用いられる推奨値情報と、を含む地図データを記憶する記憶部を有する。
【0009】
また、請求項に記載の発明は、地図データ生成装置であって、物体の識別情報と、前記物体を用いた前記移動体の位置推定の精度向上の有効性に関する有効性情報とに基づき生成された、前記物体を用いた前記移動体の位置推定に対する推奨値を示す情報であって、前記位置推定の重み付け演算に用いられる推奨値情報を、前記物体の位置情報と関連付けて、地図データを生成する生成部を有する。
また、請求項に記載の発明は、コンピュータが実行する方法であって、移動体周辺の物体を検出する検出工程と、前記移動体の推定位置を取得する第一取得工程と、前記推定位置周辺の物体の位置情報と、前記移動体の位置推定を行うことに対する推奨値を示す推奨値情報と、を含む地図情報を取得する第二取得工程と、前記検出工程により検出された前記物体の検出結果と、前記推定位置と、前記地図情報に含まれる当該物体の位置情報と、に基づき、前記移動体の位置を推定する位置推定工程と、を有し、前記位置推定工程は、前記推奨値情報に基づいた重み付け演算により、前記移動体の位置を推定する。
また、請求項に記載の発明は、移動体周辺の物体を検出する検出部と、前記移動体の推定位置を取得する第一取得部と、前記推定位置周辺の物体の位置情報と、前記移動体の位置推定を行うことに対する推奨値を示す推奨値情報と、を含む地図情報を取得する第二取得部と、前記検出部が検出した前記物体の検出結果と、前記推定位置と、前記地図情報に含まれる当該物体の位置情報と、に基づき、前記移動体の位置を推定する位置推定部としてコンピュータを機能させ、前記位置推定部は、前記推奨値情報に基づいた重み付け演算により、前記移動体の位置を推定することを特徴とするプログラムである。
【図面の簡単な説明】
【0010】
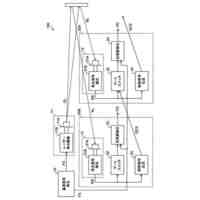
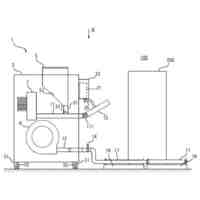
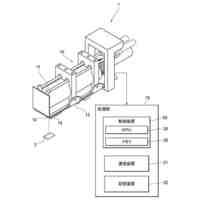
運転支援システムの概略構成図である。
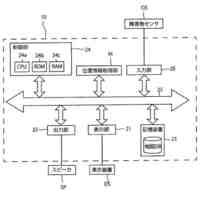
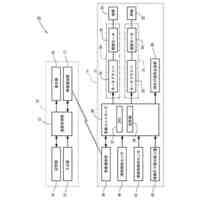
車載機及びサーバ装置の機能的構成を示すブロック図である。
状態変数ベクトルを2次元直交座標で表した図である。
予測ステップと計測更新ステップとの概略的な関係を示す図である。
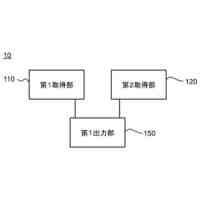
自車位置推定部の機能ブロックを示す。
オブジェクト推奨情報のデータ構造の一例である。
アップロード情報のデータ構造の概要を示す図である。
イベント情報に含まれる「オブジェクト認識イベント」のデータ構造を示す。
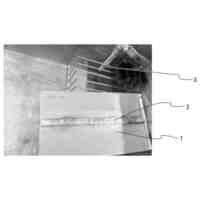
車両周辺を表す俯瞰図である。
有効フラグの設定例を示す。
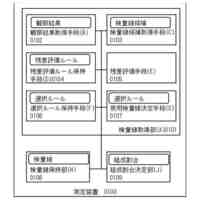
白線検出期間での共分散行列の対角要素の推移を示すグラフである。
標識検出期間での共分散行列の対角要素の推移を示すグラフである。
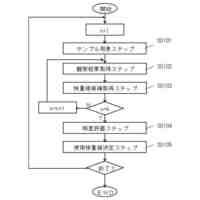
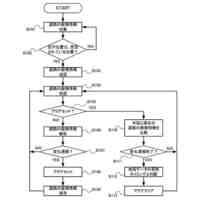
有効フラグを含むアップロード情報の送受信に関する処理の概要を示すフローチャートの一例である。
ボクセルデータに基づく位置推定を行う自車位置推定部の機能ブロックを示す。
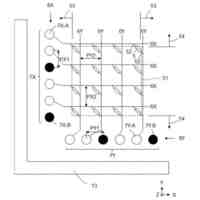
ボクセルデータの概略的なデータ構造の一例を示す。
ボクセル推奨情報のデータ構造の一例である。
車両周辺を表す俯瞰図である。
有効値の設定例を示す。
ボクセルID「4」に対する個別評価関数値の推移を示すグラフである。
ボクセルID「12」に対する個別評価関数値の推移を示すグラフである。
有効値を含むアップロード情報の送受信に関する処理の概要を示すフローチャートの一例である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
パイオニア株式会社
光学装置
4日前
パイオニア株式会社
測距装置
7日前
パイオニア株式会社
センサ装置
4日前
パイオニア株式会社
画像表示装置及び画像表示方法
4日前
パイオニア株式会社
表示制御装置、表示制御方法及びプログラム
4日前
パイオニア株式会社
出力装置、出力方法、およびコンピュータプログラム
4日前
パイオニア株式会社
情報処理装置、地図データ生成装置、方法及びプログラム
4日前
パイオニア株式会社
情報処理装置、情報収集装置、地図情報更新タイミング判定システム、地図情報更新タイミング判定方法およびプログラム
4日前
個人
粒子分析装置
1か月前
株式会社イシダ
計量装置
1か月前
日本精機株式会社
表示装置
20日前
株式会社エビス
水準器
19日前
個人
アクセサリー型テスター
1か月前
個人
準結晶の解析方法
26日前
日本精機株式会社
アセンブリ
26日前
株式会社チノー
測定装置
1日前
株式会社豊田自動織機
自動走行体
25日前
株式会社不二越
塵埃噴射装置
14日前
個人
浸透探傷試験方法
15日前
日本碍子株式会社
ガスセンサ
19日前
株式会社テイエルブイ
振動検出装置
1か月前
ダイハツ工業株式会社
試料セル
1か月前
トヨタ自動車株式会社
検査装置
1か月前
トヨタ自動車株式会社
制御装置
15日前
株式会社東芝
センサ
14日前
日本特殊陶業株式会社
ガスセンサ
13日前
日本特殊陶業株式会社
ガスセンサ
26日前
GEE株式会社
光学特性測定装置
25日前
株式会社チノー
検量線の取得方法
1日前
日本特殊陶業株式会社
ガスセンサ
14日前
東ソー株式会社
簡易型液体クロマトグラフ
1か月前
株式会社TISM
センサ部材
25日前
TDK株式会社
アレイセンサ
15日前
個人
多段電磁加速による高力積衝撃試験機
7日前
学校法人 中央大学
管内径推定装置
5日前
株式会社不二越
X線測定装置
20日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ