TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025083174
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2023196924
出願日
2023-11-20
発明の名称
テープ供給システム、部品実装装置、テープ供給方法、及び、ロボットハンド
出願人
パナソニックIPマネジメント株式会社
代理人
個人
,
個人
,
個人
主分類
H05K
13/02 20060101AFI20250523BHJP(他に分類されない電気技術)
要約
【課題】ロボットハンドを用いてフィーダのテープ供給口に対してキャリアテープの端部を正しく供給することができるテープ供給システムなどを提供する。
【解決手段】テープ供給システムにおいて、ロボットハンドは、第1嵌合部を有し、複数のフィーダの各々は、第1嵌合部に対応して嵌まり合う形状を有する第2嵌合部を有し、第1嵌合部と、複数の第2嵌合部のそれぞれとの少なくとも一方は、第2方向に対して傾斜している傾斜面を有し、ロボットの制御部は、ロボットハンドに、部品リールから引き出されたキャリアテープの端部を保持させ、第1嵌合部が対象フィーダが有する第2嵌合部に嵌合するように、ロボットハンドを第2方向に沿って移動させ、第1嵌合部が対象フィーダの第2嵌合部に接触することによって検出部が検出する荷重に基づき、ロボットアームにロボットハンドの位置を調整させ、ロボットハンドにキャリアテープを対象フィーダに供給させる。
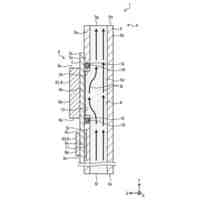
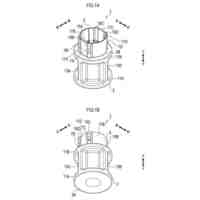
【選択図】図15
特許請求の範囲
【請求項1】
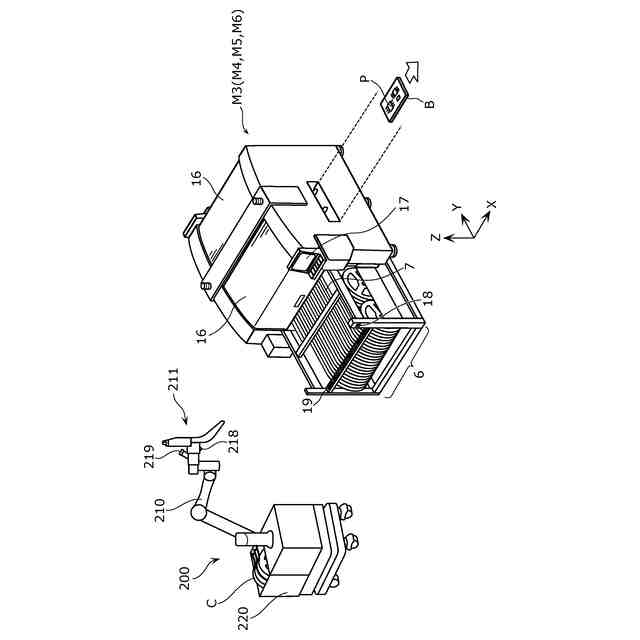
キャリアテープを収納する部品リールを保持可能であり、移動可能なロボットと、
第1方向に並んだ複数のフィーダと、を備えるテープ供給システムであって、
前記ロボットは、
前記キャリアテープおよび前記部品リールを保持可能なロボットハンドと、
前記ロボットハンドを移動させるロボットアームと、
前記ロボットハンドへの荷重を検出する検出部と、
制御部と、を有し、
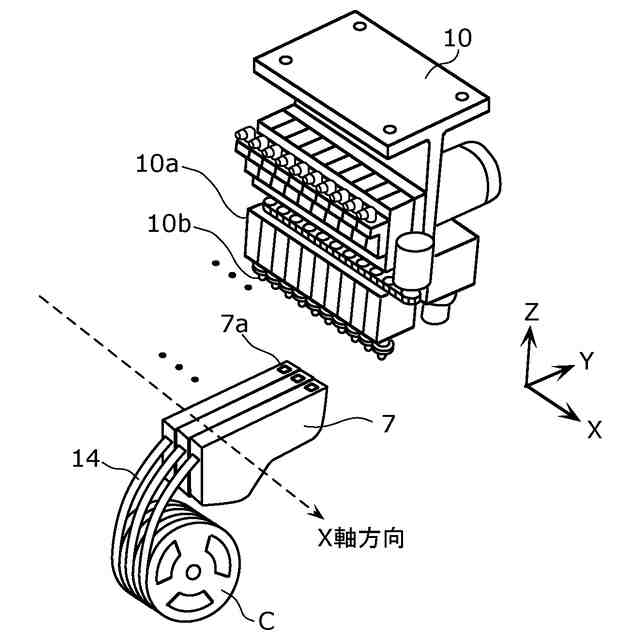
前記ロボットハンドは、前記第1方向に交差する第2方向に突出または陥没している第1嵌合部を有し、
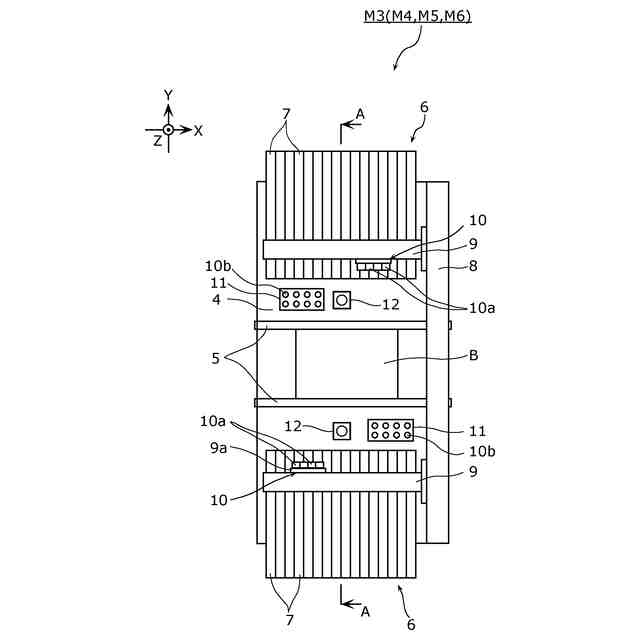
前記複数のフィーダの各々は、前記第1嵌合部の少なくとも一部に対応して嵌まり合う形状を有する第2嵌合部を有し、
複数の前記第2嵌合部は、前記第1方向に並び、
前記第1嵌合部と、前記複数の第2嵌合部のそれぞれとの少なくとも一方は、前記第2方向に対して傾斜している傾斜面を有し、
前記ロボットの前記制御部は、
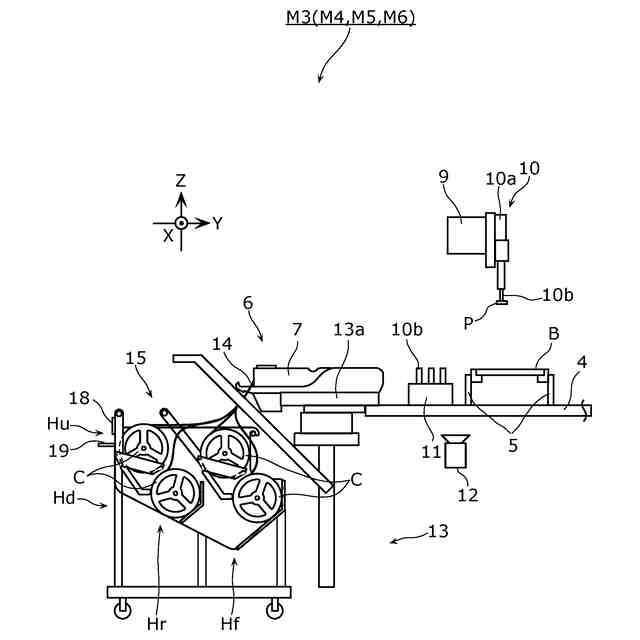
前記ロボットハンドに、前記部品リールから引き出された前記キャリアテープの端部を保持させ、
前記キャリアテープの端部を保持した前記ロボットハンドの前記第1嵌合部が前記複数のフィーダのうちの対象フィーダが有する第2嵌合部に嵌合するように、前記ロボットアームに前記ロボットハンドを前記第2方向に沿って移動させ、
前記移動の後、前記第1嵌合部が前記対象フィーダの第2嵌合部に接触することによって前記検出部が検出する荷重に基づき、前記ロボットアームに前記ロボットハンドの位置を調整させ、
前記調整の後、前記ロボットハンドに前記キャリアテープを前記対象フィーダに供給させる、
テープ供給システム。
続きを表示(約 1,300 文字)
【請求項2】
前記検出部は、前記第2方向に直交する方向における前記ロボットハンドへの第1荷重を検出し、
前記ロボットの前記制御部は、
前記移動の後、前記第1荷重が小さくなるように、前記ロボットアームに前記ロボットハンドの位置を調整させる、
請求項1に記載のテープ供給システム。
【請求項3】
前記検出部は、前記第2方向における前記ロボットハンドへの第2荷重をさらに検出し、
前記ロボットの前記制御部は、
前記調整の後、前記ロボットアームに前記ロボットハンドを前記第2方向にさらに移動させ、
前記第2荷重が所定値を超えたら、前記第2方向への前記ロボットハンドの移動を停止させる、
請求項2に記載のテープ供給システム。
【請求項4】
前記第1嵌合部は、前記第2方向に突出する凸部であり、
前記第2嵌合部は、前記第2方向に陥没する凹部である、
請求項1から3のいずれか1項に記載のテープ供給システム。
【請求項5】
前記凹部の入口側の第1部分は、前記傾斜面を有し、
前記第1部分の幅は、前記第2方向に向かうに従って狭くなる、
請求項4に記載のテープ供給システム。
【請求項6】
前記凹部の奥側の第2部分の幅は、前記第2方向において一定である、
請求項5に記載のテープ供給システム。
【請求項7】
前記部品リールを収容可能なリールホルダを有する台車をさらに備え、
前記ロボットは、前記部品リールを収容可能なリールラックをさらに有し、
前記ロボットハンド及び前記ロボットアームは、前記部品リールを前記リールラックから前記リールホルダに移動可能である、
請求項1から3のいずれか1項に記載のテープ供給システム。
【請求項8】
前記リールラックは、
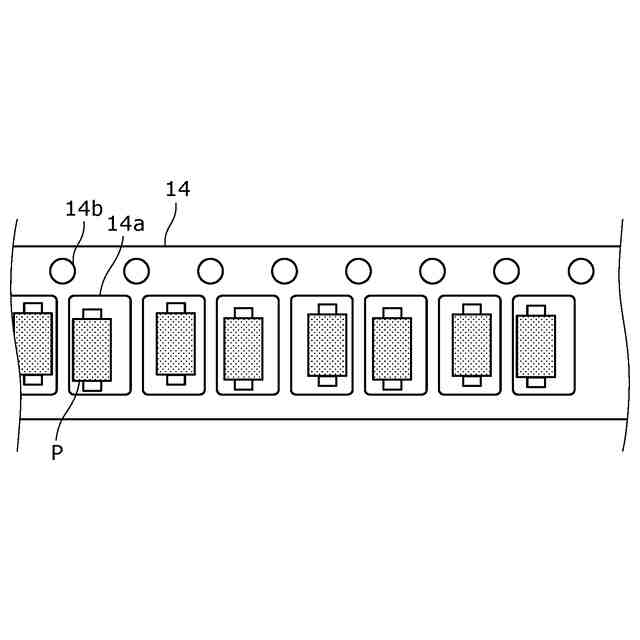
前記キャリアテープが有する複数の送り孔に対応し、前記部品リールから引き出された前記キャリアテープの端部の送り孔を貫通することで前記キャリアテープの端部を固定するピンを含むテープ固定部を有し、
前記ロボットハンドは、前記テープ固定部に固定された前記キャリアテープの端部を前記テープ固定部から取り外す、
請求項7に記載のテープ供給システム。
【請求項9】
前記ロボットは、前記複数のフィーダを撮影して撮影画像を生成するカメラをさらに有し、
前記ロボットの前記制御部は、
前記撮影画像に基づいて、前記ロボットハンドの前記第1嵌合部が前記対象フィーダの前記第2嵌合部に嵌合するように、前記ロボットアームに前記ロボットハンドを移動させる、
請求項1から3のいずれか1項に記載のテープ供給システム。
【請求項10】
前記ロボットの前記制御部は、前記供給の後、前記ロボットハンドに前記キャリアテープの保持を解除させる、
請求項1から3のいずれか1項に記載のテープ供給システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、テープ供給システム、部品実装装置、テープ供給方法、及び、ロボットハンドに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1には、自動搬送車上のロボットが、視覚センサを用いてテープリールの交換作業を実行することが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-31193号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、ロボットハンドを用いてフィーダのテープ供給口に対してキャリアテープの端部を正しく供給することができるテープ供給システムなどを提供する。
【課題を解決するための手段】
【0005】
本開示の一態様に係るテープ供給システムは、キャリアテープを収納する部品リールを保持可能であり、移動可能なロボットと、第1方向に並んだ複数のフィーダと、を備えるテープ供給システムであって、前記ロボットは、前記キャリアテープおよび前記部品リールを保持可能なロボットハンドと、前記ロボットハンドを移動させるロボットアームと、前記ロボットハンドへの荷重を検出する検出部と、制御部と、を有し、前記ロボットハンドは、前記第1方向に交差する第2方向に突出または陥没している第1嵌合部を有し、前記複数のフィーダの各々は、前記第1嵌合部の少なくとも一部に対応して嵌まり合う形状を有する第2嵌合部を有し、複数の前記第2嵌合部は、前記第1方向に並び、前記第1嵌合部と、前記複数の第2嵌合部のそれぞれとの少なくとも一方は、前記第2方向に対して傾斜している傾斜面を有し、前記ロボットの前記制御部は、前記ロボットハンドに、前記部品リールから引き出された前記キャリアテープの端部を保持させ、前記キャリアテープの端部を保持した前記ロボットハンドの前記第1嵌合部が前記複数のフィーダのうちの対象フィーダが有する第2嵌合部に嵌合するように、前記ロボットアームに前記ロボットハンドを前記第2方向に沿って移動させ、前記移動の後、前記第1嵌合部が前記対象フィーダの第2嵌合部に接触することによって前記検出部が検出する荷重に基づき、前記ロボットアームに前記ロボットハンドの位置を調整させ、前記調整の後、前記ロボットハンドに前記キャリアテープを前記対象フィーダに供給させる。
【0006】
本開示の一態様に係る部品実装装置は、上記態様に係るテープ供給システムの台車と接続される部品実装装置であって、前記対象フィーダから供給された前記キャリアテープ内の部品を基板に実装する。
【0007】
本開示の一態様に係るテープ供給方法は、キャリアテープを収納する部品リールを保持可能であり、移動可能なロボットと、第1方向に並んだ複数のフィーダと、を備えるテープ供給システムのためのテープ供給方法であって、前記ロボットは、前記キャリアテープおよび前記部品リールを保持可能なロボットハンドと、前記ロボットハンドを移動させるロボットアームと、前記ロボットハンドへの荷重を検出する検出部と、を有し、前記ロボットハンドは、前記第1方向に交差する第2方向に突出または陥没している第1嵌合部を含み、前記複数のフィーダの各々は、前記第1嵌合部の少なくとも一部に対応して嵌まり合う形状を有する第2嵌合部を含み、複数の前記第2嵌合部は、前記第1方向に並び、前記第1嵌合部と、前記複数の第2嵌合部のそれぞれとの少なくとも一方は、前記第2方向に対して傾斜している傾斜面を有し、前記テープ供給方法は、前記ロボットハンドに、前記部品リールから引き出された前記キャリアテープの端部を保持させ、前記キャリアテープの端部を保持した前記ロボットハンドの前記第1嵌合部が前記複数のフィーダのうちの対象フィーダが有する第2嵌合部に嵌合するように、前記ロボットアームに前記ロボットハンドを前記第2方向に沿って移動させ、前記移動の後、前記第1嵌合部が前記対象フィーダの第2嵌合部に接触することによって前記検出部が検出する荷重に基づき、前記ロボットアームに前記ロボットハンドの位置を調整させ、前記調整の後、前記ロボットハンドに前記キャリアテープを前記対象フィーダに供給させる。
【0008】
本開示の一態様に係るロボットハンドは、ロボットアームと接続され、部品リールから引き出されたキャリアテープを、第1方向に並ぶ複数のフィーダのうちの1つに供給可能なロボットハンドであって、前記部品リールを保持するリール保持部と、前記キャリアテープを保持する第1テープ保持機構を有するテープ保持部と、前記テープ保持部に対して、前記第1方向に交差する第2方向に移動可能に設けられ、かつ、前記テープ保持部から前記第2方向側に付勢されている移動部と、前記移動部に設けられ、前記複数のフィーダのうち対象フィーダが有する第2嵌合部の少なくとも一部に対応して嵌まり合う形状を有する第1嵌合部と、を備える。
【0009】
なお、これらの包括的または具体的な態様は、システム、方法、集積回路、コンピュータプログラムまたはコンピュータ読み取り可能なCD-ROMなどの記録媒体で実現されてもよく、システム、方法、集積回路、コンピュータプログラム及び記録媒体の任意な組み合わせで実現されてもよい。また、記録媒体は、非一時的な記録媒体であってもよい。
【発明の効果】
【0010】
本開示のテープ供給システムなどは、ロボットハンドを用いてフィーダのテープ供給口に対してキャリアテープの端部を正しく供給することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
放電器
2か月前
日本精機株式会社
駆動装置
20日前
愛知電機株式会社
盤フレーム
1か月前
個人
静電気排除専用ノズル。
2か月前
個人
day & night.
2か月前
個人
静電気除去具
1か月前
株式会社プロテリアル
シールド材
19日前
株式会社国際電気
電子装置
1か月前
三菱電機株式会社
電子機器
25日前
個人
電気抵抗電磁誘導加熱装置
1か月前
個人
電子機器収納ユニット
20日前
イビデン株式会社
プリント配線板
1か月前
株式会社LIXIL
照明システム
1か月前
イビデン株式会社
プリント配線板
1か月前
イビデン株式会社
プリント配線板
15日前
株式会社JVCケンウッド
処理装置
1か月前
株式会社タクミ精工
除電ブラシ
今日
FDK株式会社
冷却構造
1か月前
新光電気工業株式会社
配線基板
6日前
信越ポリマー株式会社
配線基板
19日前
株式会社国際電気
取っ手付き機器
2か月前
ダイニック株式会社
面状発熱体および水性塗料
26日前
住友ベークライト株式会社
基板の製造方法
20日前
富士電機株式会社
フレーム連結構造
1か月前
Astemo株式会社
電子装置
19日前
日本精機株式会社
ヘッドアップディスプレイ装置
1か月前
アイホン株式会社
ケース体における防水構造
1日前
北川工業株式会社
スペーサ
12日前
矢崎総業株式会社
導体冷却構造
2か月前
日亜化学工業株式会社
基板の製造方法
1か月前
株式会社ミツバ
モータ制御装置
1か月前
ヤマハ発動機株式会社
部品実装システム
今日
株式会社三社電機製作所
パルス駆動回路
21日前
ヤマハ発動機株式会社
部品実装システム
19日前
株式会社タクミ精工
除電ブラシの製造方法
今日
アール・ビー・コントロールズ株式会社
照明装置
19日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ