TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025080936
公報種別
公開特許公報(A)
公開日
2025-05-27
出願番号
2023194337
出願日
2023-11-15
発明の名称
搬送装置
出願人
株式会社ディスコ
代理人
インフォート弁理士法人
主分類
H01L
21/677 20060101AFI20250520BHJP(基本的電気素子)
要約
【課題】ロボットハンドの交換によって生産性が低下することを防止できる搬送装置を提供すること。
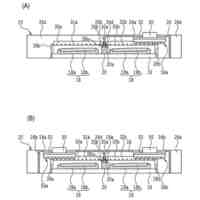
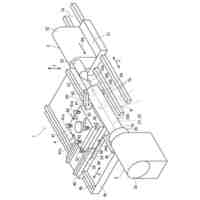
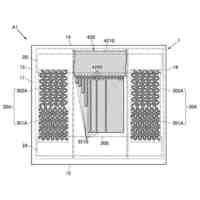
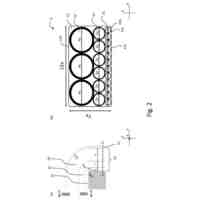
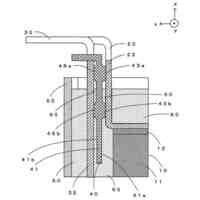
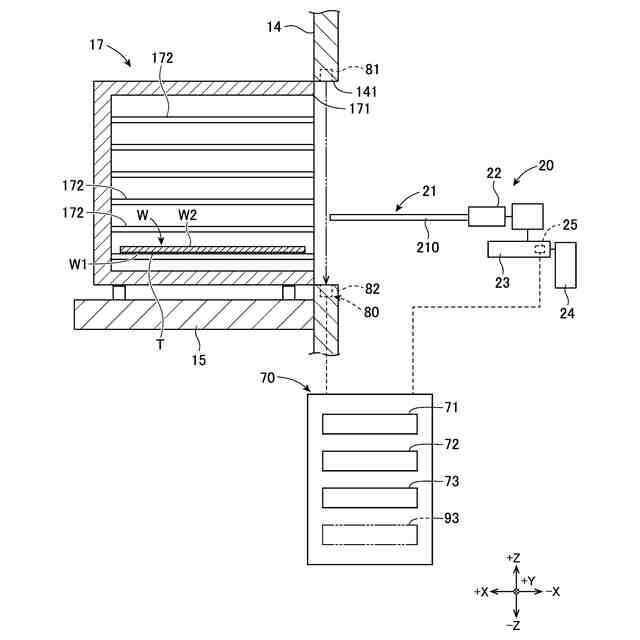
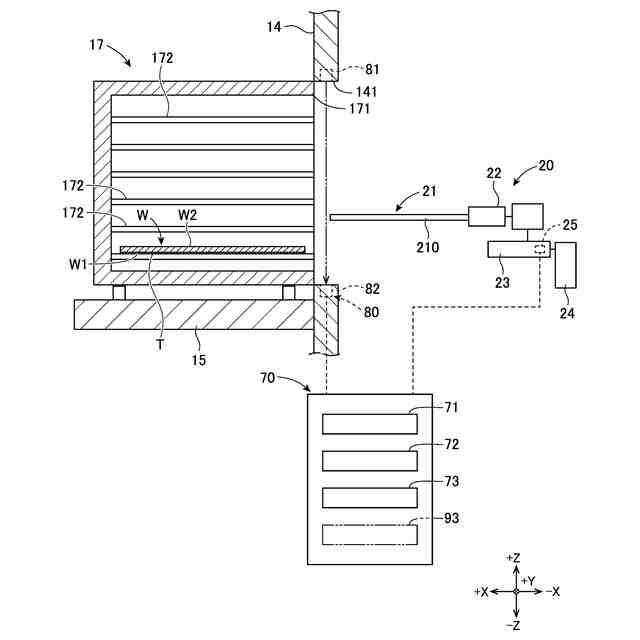
【解決手段】搬送装置は、ロボット(20)に装着したロボットハンド(21)によってウェーハ(W)を保持し、第1カセット(17)の開口部(171)を通過してウェーハを搬入出する。搬送装置は、第1カセットの開口部を鉛直方向に縦断し、開口部にウェーハが飛び出したことを検知するセンサと、ロボットハンドを水平方向に移動させる水平方向移動機構(23)と、ロボットハンドの水平方向の位置を認識する水平位置認識部(72)と、ロボットハンドの水平方向の位置に対応したロボットハンドの形状を記憶した記憶部(71)と、センサがON状態になったことと、認識された水平方向におけるロボットハンドの位置とによって記憶部に記憶されているデータを参照し、ロボットハンドの形状を認識する形状認識部(73)とを備えている。
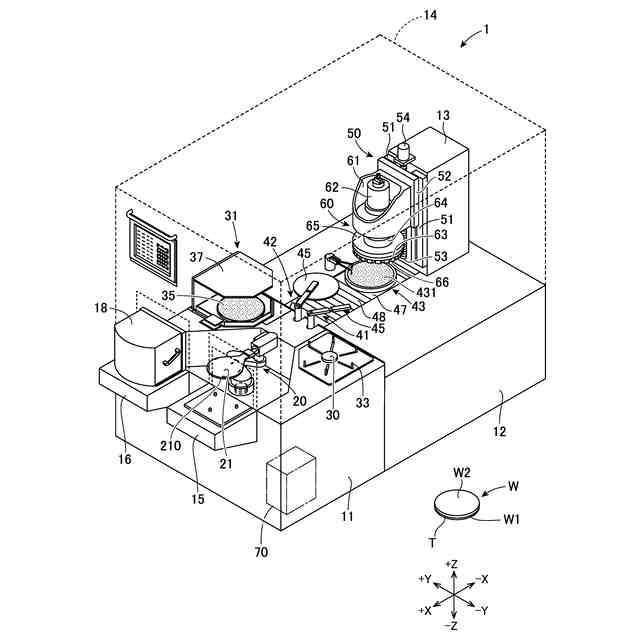
【選択図】図2
特許請求の範囲
【請求項1】
ロボットに装着したロボットハンドの保持面によってウェーハを保持し、カセットの開口部を通過して該カセットに対してウェーハを搬入または搬出する搬送装置であって、
該カセットを載置するカセットステージと、
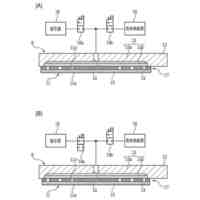
該カセットの該開口部を鉛直方向に縦断し該カセット内から該開口部にウェーハが飛び出したことを検知するセンサと、
該ロボットに装着した該ロボットハンドと、
該ロボットハンドを水平方向に移動させる水平方向移動機構と、
該ロボットハンドの水平方向の位置を認識する水平位置認識部と、
該ロボットハンドの水平方向の位置に対応した該ロボットハンドの形状を記憶した記憶部と、
該センサがON状態になったことと、該水平位置認識部で認識された水平方向における該ロボットハンドの位置とによって該記憶部に記憶されているデータを参照し、該ロボットハンドの形状を認識する形状認識部と、
を備える、搬送装置。
続きを表示(約 400 文字)
【請求項2】
ロボットに装着したロボットハンドの保持面によってウェーハを保持し、カセットの開口部を通過して該カセットに対してウェーハを搬入または搬出する搬送装置であって、
該カセットを載置するカセットステージと、
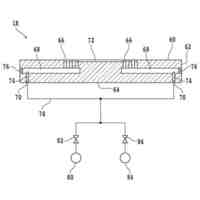
該カセットの該開口部を鉛直方向に縦断し水平方向に複数配置し該カセット内から該開口部にウェーハが飛び出したことを検知するセンサと、
該ロボットに装着した該ロボットハンドと、
該ロボットハンドを水平方向に移動させる水平方向移動機構と、
該ロボットハンドの水平方向の位置を認識する水平位置認識部と、を備え、
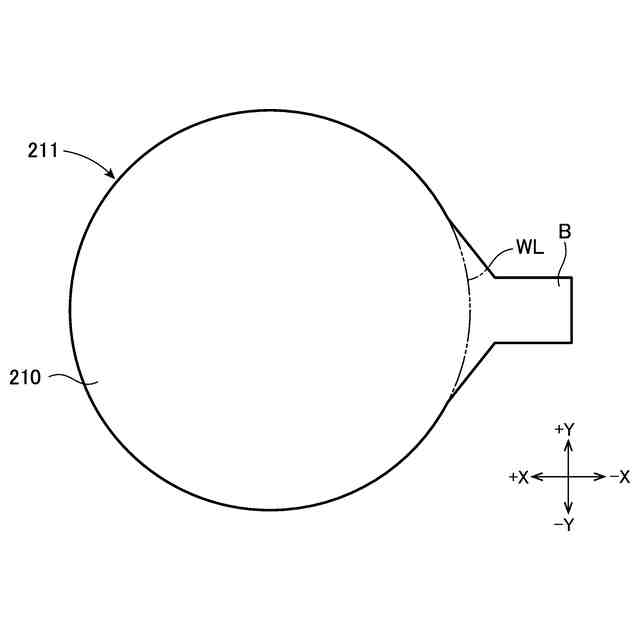
該開口部の外側から該カセット内に進入する該ロボットハンドの水平方向の複数箇所の位置と、該ロボットハンドの複数箇所の位置での各々の該センサのON状態及びOFF状態とによって、該ロボットハンドの形状を作図する作図部を備える搬送装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットハンドによってウェーハを保持して搬送する搬送装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
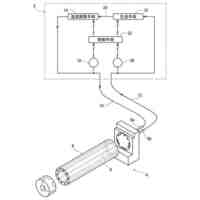
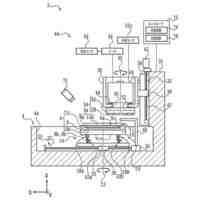
特許文献1は、ウェーハを研削砥石で研削する研削装置を開示している。特許文献1では、ウェーハを収容したカセットをカセットステージに載置し、そのカセットに収容されたウェーハをロボットのロボットハンドで保持し、カセットから取り出している。そして、研削が完了したウェーハはスピンナテーブルで洗浄した後、ロボットハンドで保持し、カセットに搬入している。
【0003】
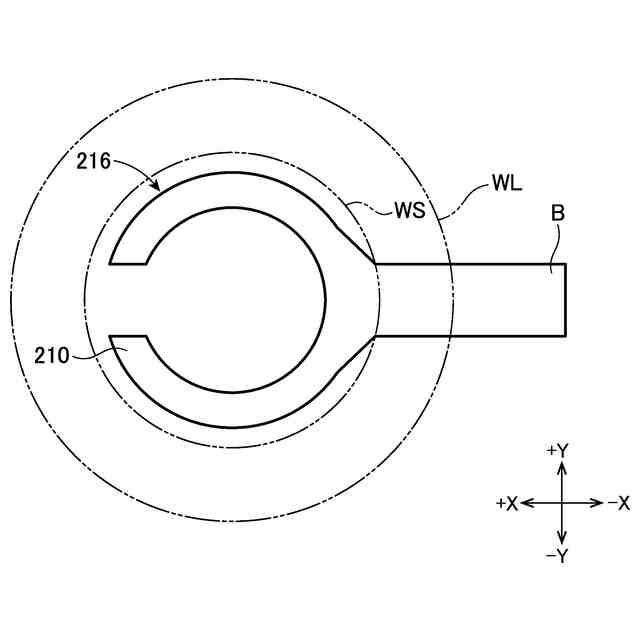
このロボットハンドは、ウェーハが変わることで交換することがある。例えば、研削後のウェーハの厚みが50μmの場合、ウェーハを洗浄するスピンナテーブルは、ウェーハの下面全面を支持するようにウェーハの面積より大きい面積のものが用いられる。そのため、ウェーハの上面を吸引保持するしゃもじ型のロボットハンドを使用している。
【0004】
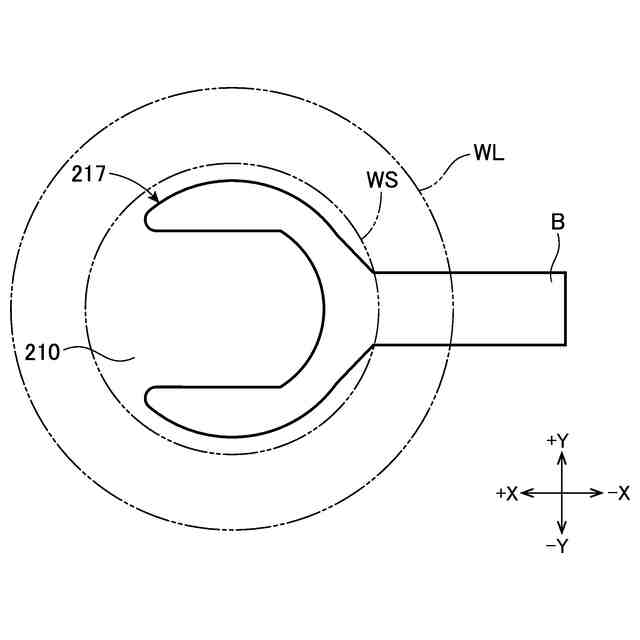
また、ウェーハの上面に傷をつけたくないウェーハの場合には、ウェーハの下面における中央の一部を支持するようウェーハの面積より小さい面積のスピンナテーブルが用いられる。そして、スピンナテーブルを避けつつウェーハの下面を吸引保持するU字型のロボットハンドを使用している。
【先行技術文献】
【特許文献】
【0005】
特開2021-065966号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記のように、保持するウェーハやスピンナテーブルの種類が変更される場合、作業者においては、ロボットハンドを交換し、更には、ロボットハンドに適応するロボットの動作設定を変更している。そのため、作業者が動作設定を意図せず忘れたりすると、ウェーハの搬送や加工が停止することがあり、生産性が低下する、という問題がある。
【0007】
本発明はかかる点に鑑みてなされたものであり、ロボットハンドの交換によって生産性が低下することを防止することができる搬送装置を提供することを目的の一つとする。
【課題を解決するための手段】
【0008】
本発明の一態様の搬送装置は、ロボットに装着したロボットハンドの保持面によってウェーハを保持し、カセットの開口部を通過して該カセットに対してウェーハを搬入または搬出する搬送装置であって、該カセットを載置するカセットステージと、該カセットの該開口部を鉛直方向に縦断し該カセット内から該開口部にウェーハが飛び出したことを検知するセンサと、該ロボットに装着した該ロボットハンドと、該ロボットハンドを水平方向に移動させる水平方向移動機構と、該ロボットハンドの水平方向の位置を認識する水平位置認識部と、該ロボットハンドの水平方向の位置に対応した該ロボットハンドの形状を記憶した記憶部と、該センサがON状態になったことと、該水平位置認識部で認識された水平方向における該ロボットハンドの位置とによって該記憶部に記憶されているデータを参照し、該ロボットハンドの形状を認識する形状認識部と、を備える。
【0009】
また、本発明の一態様の搬送装置は、ロボットに装着したロボットハンドの保持面によってウェーハを保持し、カセットの開口部を通過して該カセットに対してウェーハを搬入または搬出する搬送装置であって、該カセットを載置するカセットステージと、該カセットの該開口部を鉛直方向に縦断し水平方向に複数配置し該カセット内から該開口部にウェーハが飛び出したことを検知するセンサと、該ロボットに装着した該ロボットハンドと、該ロボットハンドを水平方向に移動させる水平方向移動機構と、該ロボットハンドの水平方向の位置を認識する水平位置認識部と、を備え、該開口部の外側から該カセット内に進入する該ロボットハンドの水平方向の複数箇所の位置と、該ロボットハンドの複数箇所の位置での各々の該センサのON状態及びOFF状態とによって、該ロボットハンドの形状を作図する作図部を備える。
【発明の効果】
【0010】
本発明によれば、センサの検知結果等に基づき、形状認識部でロボットハンドの形状を認識したり、作図部でロボットハンドの形状を作図したりすることで、複数種のロボットハンドを使用する場合に装着されたロボットハンドの変更や交換を把握し易くなる。これにより、作業者に対し、ロボットハンドの変更に伴う動作設定作業をアラーム等によって促すことができ、該作業が確実に行われるようになる。その結果、ロボットハンドの破損等を未然に防止でき、ウェーハの搬送や加工が停止することを回避して生産性を良好に保つことができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ディスコ
加工装置
2日前
株式会社ディスコ
搬送装置
3日前
株式会社ディスコ
搬送装置
7日前
株式会社ディスコ
調整方法
9日前
株式会社ディスコ
処理システム
2日前
株式会社ディスコ
温度制御装置
7日前
株式会社ディスコ
板状物の搬送方法
9日前
株式会社ディスコ
位置合わせ時治具
10日前
株式会社ディスコ
チャックテーブル
11日前
株式会社ディスコ
研削装置及び研削方法
2日前
株式会社ディスコ
積層ウエーハの加工方法
11日前
株式会社ディスコ
チャックテーブルの洗浄方法
10日前
株式会社ディスコ
鋸ブレードのドレッシング方法
7日前
株式会社ディスコ
研削装置、検出方法及び研削ホイール
2日前
株式会社ディスコ
研削装置、及び、被加工物の研削方法
4日前
株式会社ディスコ
レーザー加工装置の検査方法及びレーザー加工方法
9日前
甲神電機株式会社
変流器
21日前
APB株式会社
二次電池
15日前
株式会社東光高岳
変圧器
8日前
株式会社東光高岳
変圧器
8日前
ローム株式会社
チップ部品
11日前
ローム株式会社
半導体装置
17日前
太陽誘電株式会社
全固体電池
16日前
CKD株式会社
倣い装置
4日前
トヨタ自動車株式会社
集合導線
17日前
トヨタ自動車株式会社
二次電池
16日前
APB株式会社
二次電池セルの製造方法
15日前
ローム株式会社
半導体装置
2日前
株式会社不二越
ソレノイド
3日前
CKD株式会社
傾き調整装置
4日前
富士電機株式会社
半導体装置
4日前
日本圧着端子製造株式会社
コネクタ
9日前
トヨタ自動車株式会社
電池昇温装置
4日前
ニチコン株式会社
コンデンサ
10日前
三菱電機株式会社
半導体装置
16日前
トヨタ自動車株式会社
充電システム
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ