TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025078168
公報種別
公開特許公報(A)
公開日
2025-05-20
出願番号
2023190546
出願日
2023-11-08
発明の名称
産業用ロボット及びロボット用配管構造
出願人
株式会社デンソーウェーブ
代理人
個人
主分類
B25J
19/00 20060101AFI20250513BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】アームに配管部材等の配管構造を収容可能となっている産業用ロボットについて、衛生管理の容易化と配管部材等の配管構造とともにアーム内に収容される他のロボット用部品の保護とに寄与すること。
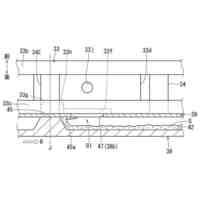
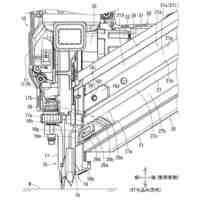
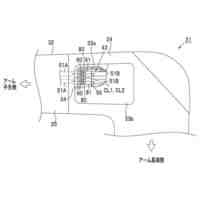
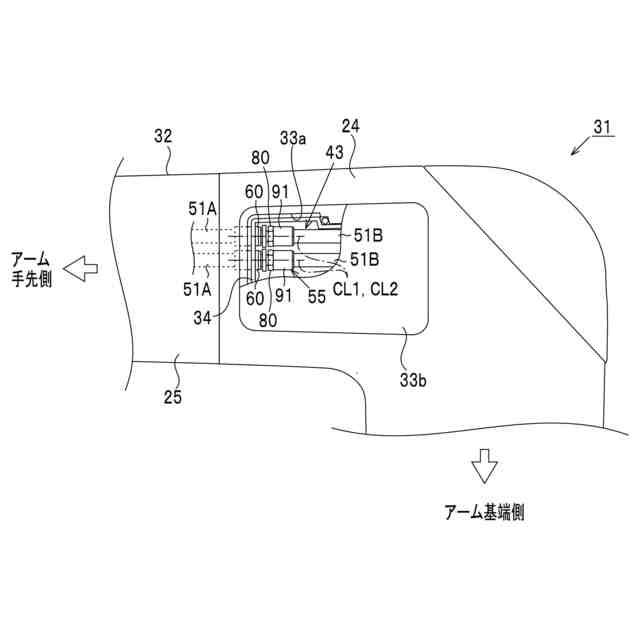
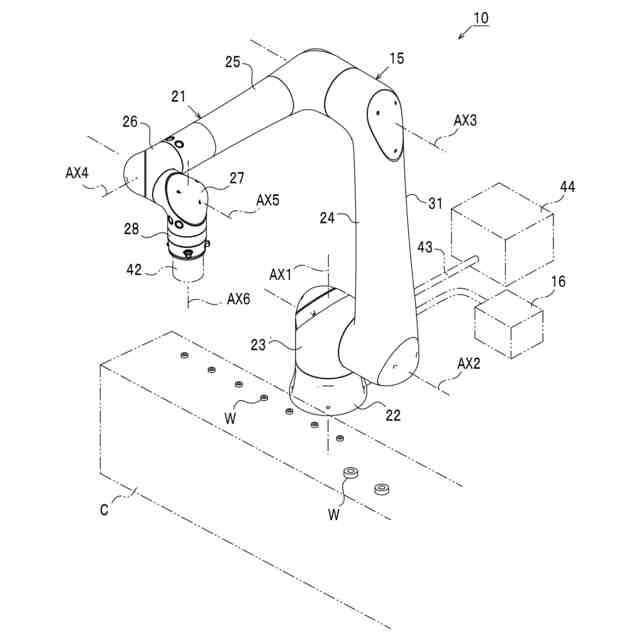
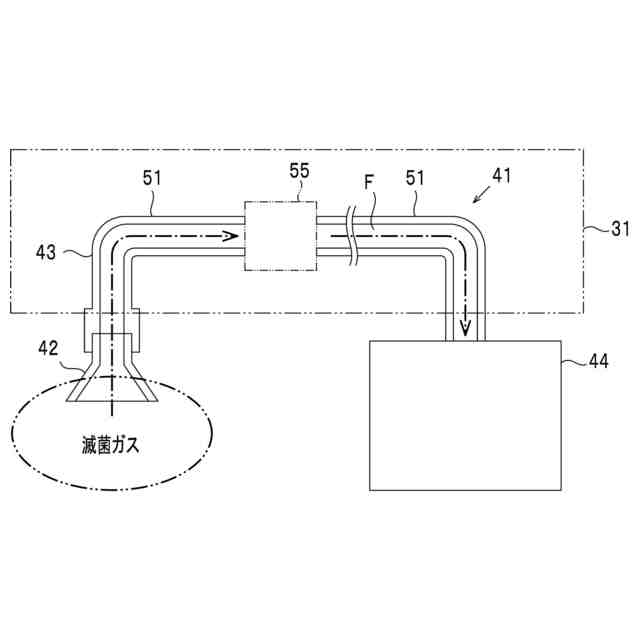
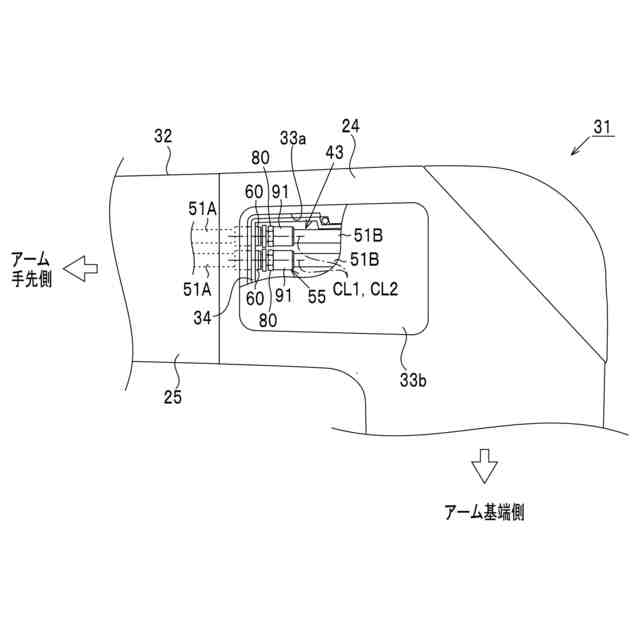
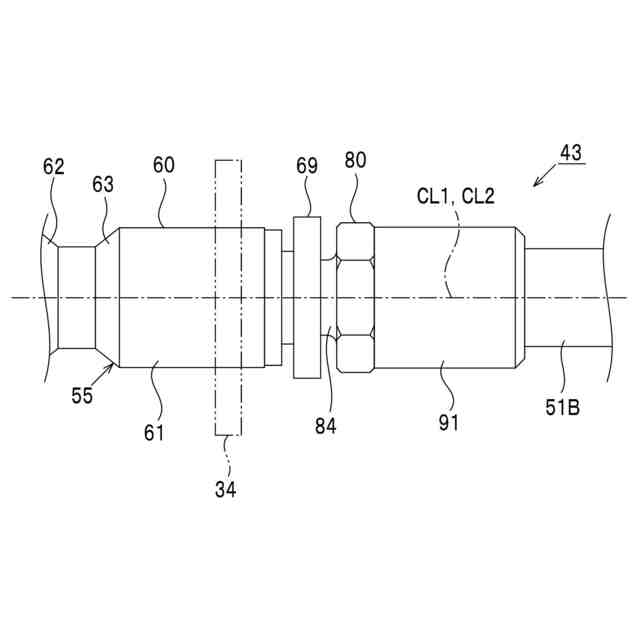
【解決手段】産業用ロボットのアーム31には、アーム31の手先に装着された吸着パッドと吸引用のポンプとを繋ぐ配管部43が内蔵されている。配管部43は、第1配管部材51A、第2配管部材51B、それらを連結する配管継手55とを有してなる。配管継手55は、第1配管部材51Aの端部に取り付けられた第1継手60と、第2配管部材51Bの端部に取り付けられた第2継手80とを含む。第2継手80の継手本体には、第1継手60の継手本体に形成された挿入孔に挿入される挿入部が設けられている。挿入孔に挿入部が挿入されることで、両継手60,80は挿入孔の内周面と挿入部の外周面との間でシールされ且つ両継手60,80の分離が規制される。
【選択図】 図6
特許請求の範囲
【請求項1】
複数の関節部が形成されたアームを有する産業用ロボットに適用され、前記アームの手先に取り付けられた吸着部と吸引用のポンプとを繋ぐ流路を前記アーム内に形成するロボット用配管構造であって、
前記流路を構成する複数の配管部材とそれら配管部材を一連となるようにして連結する配管継手とを備え、
前記複数の配管部材として、第1配管部材及び第2配管部材を含み、
前記配管継手として、
前記流路を構成する第1本体部を有し、前記流路の流路方向における当該第1本体部の一端部に前記第1配管部材が取り付けられる第1継手と、
前記第1本体部の他端部に形成された挿入孔に挿入される筒状の第2本体部を有し、前記第1継手とともに前記流路の一部を構成する第2継手と
を含み、
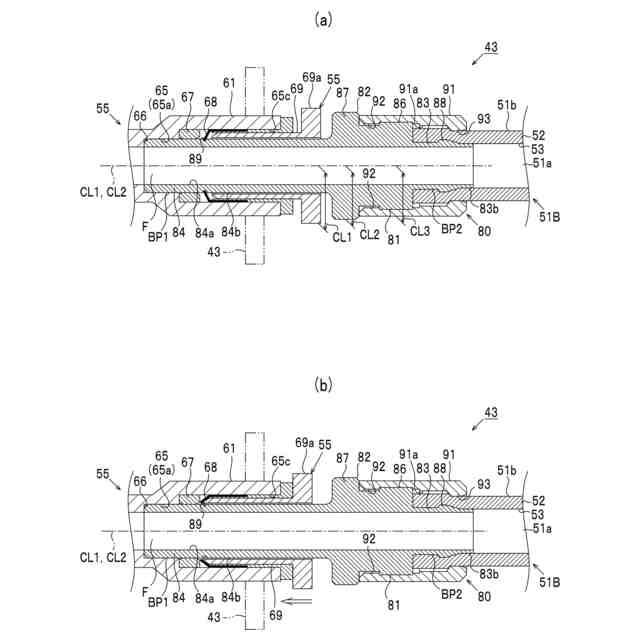
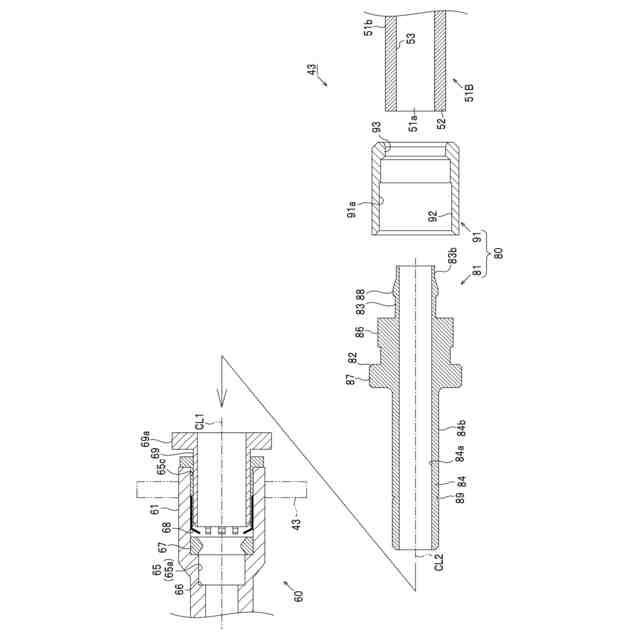
前記第1継手及び前記第2継手は、前記ロボット用配管構造の滅菌に際して前記流路を流れる滅菌用の流体に対して耐腐食性を有し、前記第2本体部が前記第1本体部の前記挿入孔に挿入されることにより前記第2本体部にて前記挿入孔に挿入されている部分の外周面と前記挿入孔の内周面との間でシールされ且つそれら第1継手及び第2継手の分離が規制されるように構成されており、
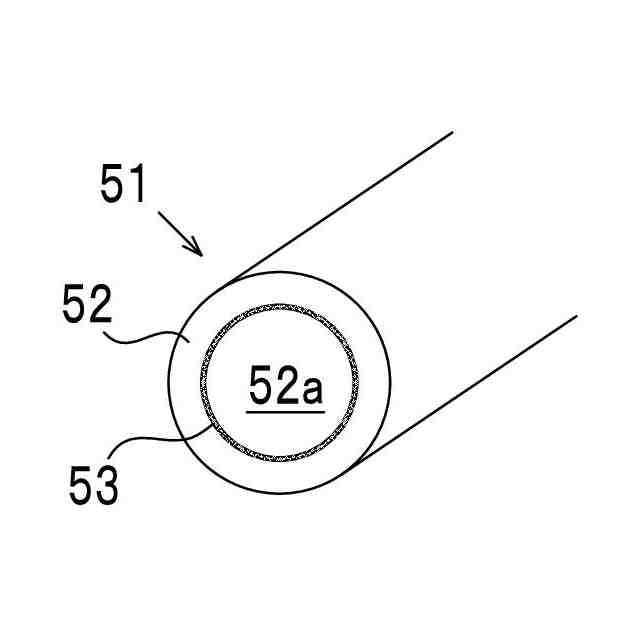
前記第2配管部材の内周面は、当該第2配管部材のベース層と比べて前記耐腐食性が高い耐腐食層となるように構成されており、
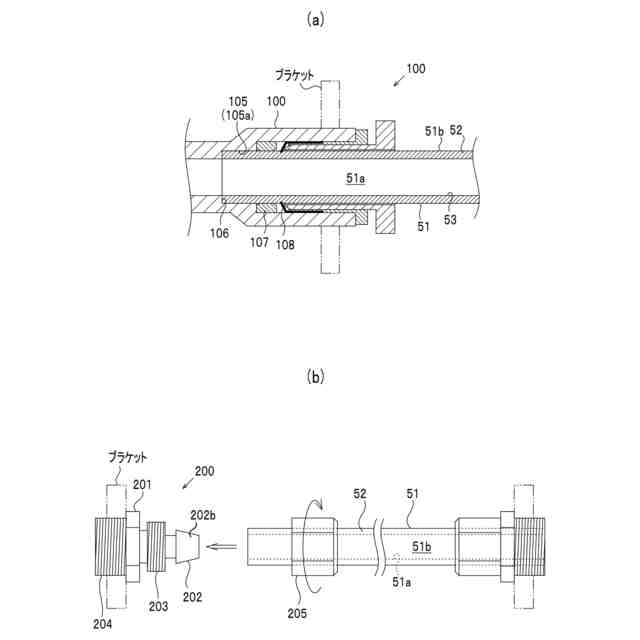
前記第2継手は、前記分離が規制された状態にて前記第2本体部の一部が前記挿入孔から延出するように形成されており、その延出する部分には第2配管部材が取り付けられる取付部が設けられており、
前記第2継手の前記取付部は前記第2配管部材に挿入され、前記第2継手及び前記第2配管部材は、前記取付部の外周面と前記第2配管部材の内周面との間でシールされているロボット用配管構造。
続きを表示(約 1,500 文字)
【請求項2】
前記第1継手及び前記第2継手は、前記流体に対して耐腐食性を有する材料により形成されており、前記第2配管部材の前記耐腐食層はコーティングにより形成されている請求項1に記載のロボット用配管構造。
【請求項3】
前記挿入孔の内周面及び前記第2本体部の外周面は何れも円形をなしており、
前記第2本体部の外周面には、当該第2本体部の中心軸線を中心とした環状をなす溝部が形成されており、
前記第1継手は、前記溝部に係止されることにより前記分離を規制する爪部を有している請求項1又は請求項2に記載のロボット用配管構造。
【請求項4】
前記第2本体部の中間部分には、当該第2本体部の中心軸線と交差する方向へ突出する突出部が設けられており、
前記第2継手は、前記突出部の外周面に形成されたネジ部に係合することにより、前記取付部に取り付けられた前記第2配管部材を当該取付部との間に挟み込むようにして固定する固定具を有し、
前記第1継手は、前記第1継手と第2継手との分離を規制する規制状態と当該分離を規制しない非規制状態とに切替可能な規制部と、前記挿入孔の軸線方向に変位可能であり且つ前記挿入孔から突出するようにして配置された操作部とを有し、ユーザが前記操作部を前記挿入孔側へ押すことで前記規制部が前記規制状態から前記非規制状態に切り替わるように構成されており、
前記第1継手及び前記第2継手は、前記規制部により分離が規制されている場合に、前記操作部と前記突出部及び前記固定具とが非接触となるようにして形成されている請求項1又は請求項2に記載のロボット用配管構造。
【請求項5】
複数の関節部が形成されたアームを備え、
前記アームの手先にワークを吸着する吸着部が取り付けられ、前記アームの内部に前記吸着部と吸引用のポンプとを繋ぐ流路を形成するロボット用配管構造が配設された産業用ロボットであって、
前記ロボット用配管構造として、第1配管部材及び第2配管部材と、それら配管部材を一連となるようにして連結する配管継手とを有し、
前記配管継手として、
前記流路を構成する第1本体部を有し、前記流路の流路方向における当該第1本体部の一端部に前記第1配管部材が取り付けられた第1継手と、
前記第1本体部の他端部に形成された挿入孔に挿入される筒状の第2本体部を有し、前記第1継手とともに前記流路の一部を構成する第2継手と
を含み、
前記第1継手及び前記第2継手は、前記ロボット用配管構造の滅菌に際して前記流路を流れる滅菌用の流体に対して耐腐食性を有し、前記第2本体部が前記第1本体部の前記挿入孔に挿入されることにより前記第2本体部にて前記挿入孔に挿入されている部分の外周面と前記挿入孔の内周面との間でシールされ且つそれら第1継手及び第2継手の分離が規制されるように構成されており、
前記第2配管部材の内周面は、当該第2配管部材のベース層と比べて前記耐腐食性が高い耐腐食層となるように構成されており、
前記第2継手は、前記分離が規制された状態にて前記第2本体部の一部が前記挿入孔から延出するように形成されており、その延出する部分には第2配管部材が取り付けられる取付部が設けられており、
前記第2継手の前記取付部は前記第2配管部材に挿入され、前記第2継手及び前記第2配管部材は、前記取付部の外周面と前記第2配管部材の内周面との間でシールされている産業用ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、産業用ロボット及び産業用ロボットに適用される配管構造に関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
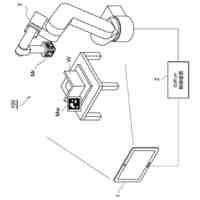
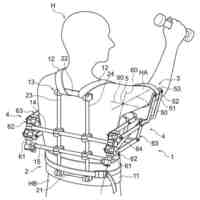
多関節型のアームを有する産業用ロボットには、当該アームの手先にワークを保持するハンドを装着可能となっているものがある。この種のハンドには、複数の指部によってワークを挟持するように構成されたものや、配管部材を介してポンプに接続された吸着パッド(吸着部)によってワークを吸着するように構成されたものがある(例えば、特許文献1参照)。吸着タイプのハンドが装着される産業用ロボットには、上記配管部材をアーム内に収容することで産業用ロボットの外装を清掃する際の作業性等に配慮したものが提案されている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
特開2004-291132号公報
特開2019-147236号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、上述した吸着タイプのハンドを医療や食品製造等の分野で用いる場合には、配管部材(流路)を滅菌して菌の増殖を抑えることが好ましい。例えば、過酸化水素等の滅菌ガス(流体)を吸着パッドから吸引して配管部材に流す構成とすれば、配管部材等を脱着することなく滅菌作業を行うことができる。これは、滅菌作業の効率化を図る上で有利である。但し、滅菌ガスには腐食性を有しているものがあり、アーム内に収容された配管部材から滅菌ガスが漏れることでアーム内の他のロボット用部品(配線、コネクタ、基板、センサ等)が腐食すると懸念される。これは、産業用ロボットの耐久性の低下や動作不良の要因になり得るため好ましくない。特に、配管部材をアーム内に収容する場合には、アームの特性上、複数の配管部材とそれら配管部材を接続する配管継手とを用いて流路を形成することが合理的であるものの、このような配管構造においては配管部材の接続箇所にて上述した漏れが発生しやすくなると想定される。また、配管部材や配管継手を他のロボット用部品とともにアームに収容する場合には、それらロボット用部品が配管部材の接続作業の妨げとなって当該接続作業がやりづらくなる可能性がある。これは、作業ミスを招く要因となり、作業ミスによって接続が不完全になることは滅菌ガスの漏れの要因となり得る。このように、産業用ロボットの配管構造に係る構成には、産業用ロボットの衛生管理の容易化と配管部材等の配管構造とともにアーム内に収容される他のロボット用部品の保護とを図る上で未だ改善の余地がある。
【0005】
本発明は、上記例示した課題等に鑑みてなされたものであり、その主たる目的は、アームに配管部材等の配管構造を収容可能となっている産業用ロボットについて、衛生管理の容易化と配管部材等の配管構造とともにアーム内に収容される他のロボット用部品の保護とに寄与することにある。
【課題を解決するための手段】
【0006】
以下、上記課題を解決するための手段について記載する。
【0007】
第1の手段.複数の関節部が形成されたアームを有する産業用ロボットに適用され、前記アームの手先に取り付けられた吸着部と吸引用のポンプとを繋ぐ流路を前記アーム内に形成するロボット用配管構造であって、
前記流路を構成する複数の配管部材とそれら配管部材を一連となるようにして連結する配管継手とを備え、
前記複数の配管部材として、第1配管部材及び第2配管部材を含み、
前記配管継手として、
前記流路を構成する第1本体部を有し、前記流路の流路方向における当該第1本体部の一端部に前記第1配管部材が取り付けられる第1継手と、
前記第1本体部の他端部に形成された挿入孔に挿入される筒状の第2本体部を有し、前記第1継手とともに前記流路の一部を構成する第2継手と
を含み、
前記第1継手及び前記第2継手は、前記ロボット用配管構造の滅菌に際して前記流路を流れる滅菌用の流体に対して耐腐食性を有し、前記第2本体部が前記第1本体部の前記挿入孔に挿入されることにより前記第2本体部にて前記挿入孔に挿入されている部分の外周面と前記挿入孔の内周面との間でシールされ且つそれら第1継手及び第2継手の分離が規制されるように構成されており、
前記第2配管部材の内周面は、当該第2配管部材のベース層と比べて前記耐腐食性が高い耐腐食層となるように構成されており、
前記第2継手は、前記分離が規制された状態にて前記第2本体部の一部が前記挿入孔から延出するように形成されており、その延出する部分には第2配管部材が取り付けられる取付部が設けられており、
前記第2継手の前記取付部は前記第2配管部材に挿入され、前記第2継手及び前記第2配管部材は、前記取付部の外周面と前記第2配管部材の内周面との間でシールされている。
【0008】
第1の手段に示す構成によれば、第2継手の第2本体部を第1継手の挿入孔に挿入することにより、第1継手と第2継手とが第1本体部の挿入孔の内周面と第2本体部の外周面との間でシールされ且つ両継手の分離が規制される。このように、第1配管部材と第2配管部材とを連結する際の作業を簡易とすることは、アーム内の限られたスペースで当該作業(配管構造の組付作業)を行う際の作業効率の向上や作業ミスの抑制を図る上で好ましい。また、第2継手に対する第2配管部材の取付作業(事前準備)については、アーム内の狭いスペースで行う必要がなく、アーム外の広いスペースで行うことができる。故に、第2配管部材を第2継手に取り付ける際の固定具や工具の使用に係る制約を緩和できる。これは、第2配管部材と第2継手とを強固に固定し、第2配管部材と第2継手との境界部分からの滅菌用の流体の漏れを抑制する上で好ましい。
【0009】
第2配管部材は、内周面側に耐腐食層が設けられた複層構造となっている。このような構成とすれば耐腐食性を付与しつつ第2配管部材のベース層の材質の自由度を高くすることができる。これは、第2配管部材の弾性や柔軟性の適正化を図り、配管の取り回しに係る制約を緩和したり、第2配管部材の耐久性を向上させたりする上で好ましい。また、第2継手及び第2配管部材については、第2本体部の外周面と第2配管部材の内周面との間でシールされる。これにより、第2配管部材にて耐腐食性の低い部分(外周面)の腐食を抑え、当該腐食に起因して第2配管部材のシールが甘くなることを抑制できる。また、第1継手及び第2継手については何れも耐腐食性を有している。このため、第1継手(挿入孔)の内周面と第2継手の外周面との境界部分に滅菌ガスが入り込んだとしても、それに起因した第1継手及び第2継手の腐食を回避し、当該腐食に起因して両継手のシールが甘くなることを抑制できる。以上の構成によれば、アーム内への滅菌用の流体の漏れを抑え、アーム内に収容されている他のロボット用部品の保護に寄与できる。
【0010】
そして、第1の手段に示す構成によれば、配管部材等をアームに組み付けた状態のまま、吸着部から滅菌用の流体を吸引等することにより、配管部材や配管継手等の滅菌(除染)が可能である。これにより、産業用ロボットについて衛生管理の容易化に寄与できる。更には、滅菌作業の都度、配管部材等の脱着が行う必要がないため、滅菌作業の頻度を上げて衛生管理の強化を図ったとしてもそれによる作業負荷の増大を好適に抑制することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クレスコ
補助吸着具
26日前
株式会社不二越
ロボット
18日前
東京都公立大学法人
対象物把持装置
1日前
庄内機械株式会社
釘打装置
5日前
住友重機械工業株式会社
ロボット
12日前
株式会社アイエイアイ
グリッパー
7日前
川崎重工業株式会社
制動システム
18日前
株式会社イノウ
給油口キャップ用開閉具
19日前
オークラ輸送機株式会社
ハンド装置
今日
株式会社不二越
垂直多関節ロボット
19日前
アイホン株式会社
ネジ締めカウントシステム
20日前
芝浦機械株式会社
双腕ロボット
11日前
トヨタ自動車東日本株式会社
搬送治具
5日前
トヨタ自動車株式会社
荷姿影響緩和方法
8日前
パナソニック株式会社
工具
19日前
パナソニック株式会社
工具
19日前
株式会社マキタ
電動工具
5日前
住友重機械工業株式会社
ロボット及びカバー
12日前
株式会社ダイヘン
端末装置
5日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
12日前
株式会社マキタ
打ち込み工具
5日前
住友重機械工業株式会社
アクチュエータ支持部材
11日前
株式会社マキタ
打ち込み工具
5日前
株式会社マキタ
打ち込み工具
20日前
株式会社日立製作所
軌道計画システム
7日前
株式会社国際電気通信基礎技術研究所
リンク機構制御装置
7日前
株式会社関電工
目盛り付きペンチ及びテンションメンバ固定方法
6日前
工機ホールディングス株式会社
作業機
5日前
TOPPANホールディングス株式会社
トング
今日
株式会社デンソーウェーブ
産業用ロボット及びロボット用配管構造
今日
住友ナコ フォ-クリフト株式会社
ベアリングナット締付具
8日前
三菱重工業株式会社
把持装置および方法
7日前
ザ・ボーイング・カンパニー
逆運動学的計算時間の短縮
4日前
学校法人早稲田大学
上腕動作補助装置
1日前
株式会社星野商店
アッパーアーム用カバー
7日前
コネクテッドロボティクス株式会社
保持システム、及び制御装置
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ