TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025076093
公報種別
公開特許公報(A)
公開日
2025-05-15
出願番号
2023187814
出願日
2023-11-01
発明の名称
車両の運転支援装置
出願人
株式会社SUBARU
代理人
インフォート弁理士法人
,
弁理士法人イトーシン国際特許事務所
主分類
B60W
30/02 20120101AFI20250508BHJP(車両一般)
要約
【課題】自車両がカーブをACC制御で走行するに際し、運転者に不快感を与えることなく、スムーズに通過させることができるようにする。
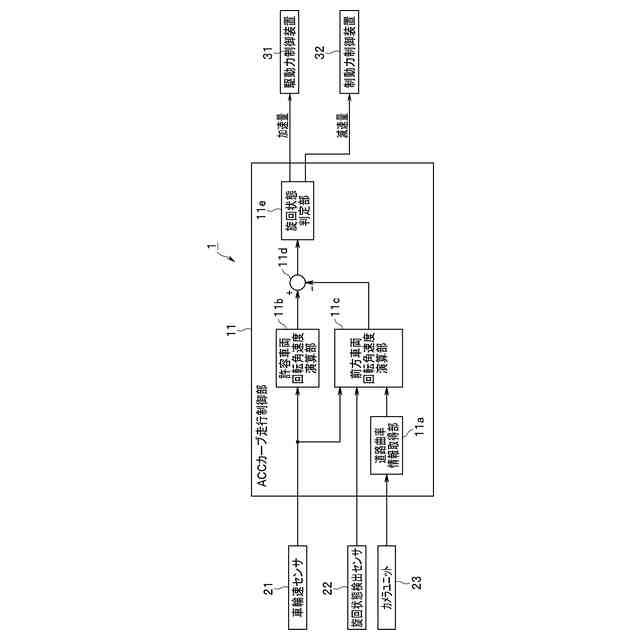
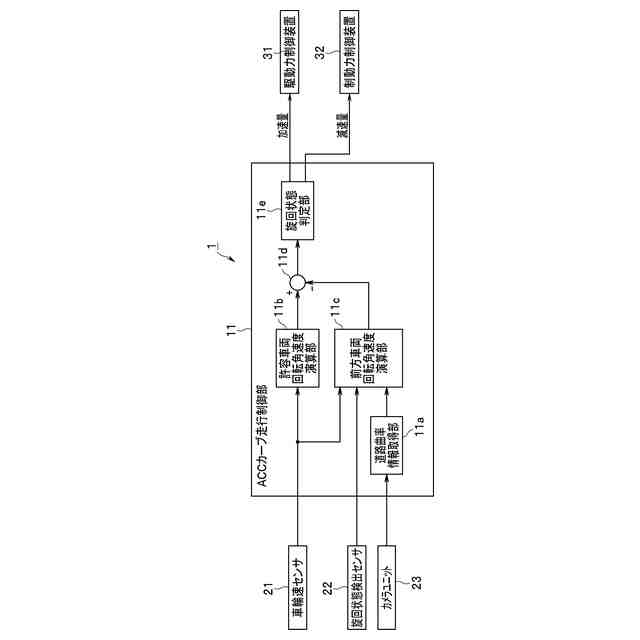
【解決手段】カーブ走行車速制御部は、自車速と予め設定されている許容旋回横加速度とに基づいて許容車両回転角速度を算出する許容車両回転角速度演算部と、走行環境情報に基づいて自車両前方の道路曲率情報を取得する道路曲率情報取得部と、旋回状態情報と道路曲率情報とに基づいて自車両前方の道路曲率における自車両の回転角速度を求める回転角速度演算部と、許容車両回転角速度と回転角速度との角速度偏差を求める角速度偏差演算部と、この角速度偏差に基づいて自車両がカーブ進入か旋回中かカーブ退出かの旋回状態を判定する旋回状態判定部とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
自車両の自車速を検出する自車速検出部と、
前記自車両の旋回状態情報を検出する旋回状態検出部と、
前記自車両前方の走行環境情報を取得する走行環境情報取得部と、
自動車速制御部と
を備える車両の運転支援装置において、
前記自動車速制御部は、カーブ走行車速制御部を有し、
前記カーブ走行車速制御部は、
前記自車速検出部で検出した前記自車速と予め設定されている許容旋回横加速度とに基づいて許容車両回転角速度を算出する許容車両回転角速度演算部と、
前記走行環境情報取得部で取得した前記走行環境情報に基づいて前記自車両前方の道路曲率情報を取得する道路曲率情報取得部と、
前記旋回状態検出部で検出した前記旋回状態情報と前記道路曲率情報取得部で取得した前記道路曲率情報とに基づいて前記自車両前方の道路曲率における該自車両の回転角速度を求める前方車両回転角速度演算部と、
前記許容車両回転角速度演算部で算出した前記許容車両回転角速度と前記前方車両回転角速度演算部で求めた前記回転角速度との角速度偏差を求める角速度偏差演算部と、
前記前方車両回転角速度演算部で求めた前記角速度偏差に基づいて前記自車両がカーブ進入か旋回中かカーブ退出かの旋回状態を判定する旋回状態判定部と
を備える車両の運転支援装置。
続きを表示(約 500 文字)
【請求項2】
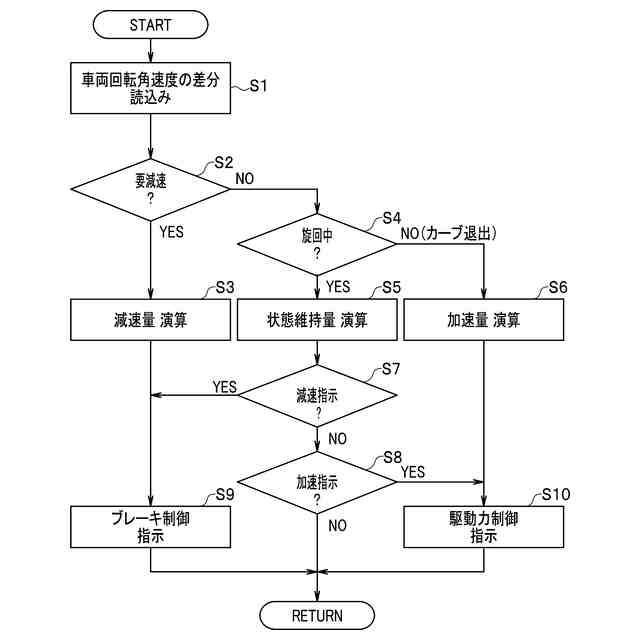
前記旋回状態判定部は、前記自車両がカーブに進入すると判定した場合、現在の前記自車速とカーブの道路曲率とに基づいて算出した前記回転角速度がカーブ進入時において前記許容車両回転角速度となるように減速させる
ことを特徴とする請求項1記載の車両の運転支援装置。
【請求項3】
前記旋回状態判定部は、前記自車両は旋回中と判定した場合、現在の駆動力量を維持した走行を継続させる
ことを特徴とする請求項1記載の車両の運転支援装置。
【請求項4】
前記旋回状態判定部は、前記自車両がカーブから退出すると判定した場合、前記回転角速度が前記許容車両回転角速度となるように前記自車速を加速させる
ことを特徴とする請求項1記載の車両の運転支援装置。
【請求項5】
運転者が操作したハンドルの切増し/切戻しを検出するハンドル操作検出部を更に有し、
前記旋回状態判定部は、前記ハンドル操作検出部で前記ハンドルの切増しを検出した場合、前記自車両は旋回中と判定する
ことを特徴とする請求項1記載の車両の運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の運転支援装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、この種の運転支援装置として追従車間距離制御(ACC:Adaptive Cruise Control)機能が知られている。ACC制御では、例えば車両に搭載されている車載カメラや各種レーダセンサ、或いはそれらの組み合わせからなる前方認識装置により、先行車との距離を認識し、先行車に追従して自車両を走行させる。又、自車両の前方に先行車が認識されない場合、ACC制御は自車両をセット車速(運転者が設定した車速)で走行させる。
【0003】
最近のACC制御は、高速道路のみならず一般道路で機能させることも可能となっている。高速道路のカーブは曲率が計算されて設計されている。これに対し、一般道路のカーブは地形の形状に沿って設計されている場合が多い。従って、一般道路では曲率の大きなカーブが連続していたり、曲率の異なる複数のカーブが連続されている場合もある。
【0004】
一般道路を、ACC制御によってセット車速で走行している場合、自車両がカーブに進入しようとする状態であっても、自車両はセット車速での走行を維持しようとする。その結果、自車両は減速せずにカーブに進入してしまう場合がある。ACC制御で走行している状態では、運転者は自身の足をアクセルペダルやブレーキペダルから離している場合が多い。そのため、自車両が減速するとなくセット車速でカーブに進入しようとするに際し、運転者が速度超過を認識した場合であっても、ブレーキペダルの踏込みに遅れが生じ易い。その結果、運転者のブレーキ操作に遅れが生じ、ハンドル角を大きく切ってカーブを通過することになる。
【0005】
このように、運転者は、ACC制御を利用して一般道路を走行している場合であっても、ACC制御の特性を熟知してカーブを走行する必要がある。しかし、運転に不慣れな初心運転者にACC制御の特性を熟知させることは困難である。その結果、例えば、運転者が初心者の場合、ACC制御を利用して運転している自車両がカーブに進入しようとするに際し、ハンドル操作やブレーキ操作に遅れが生じ、慌てさせることになる。又、運転者の操作に遅れが生じることで車両の挙動が不安定になる場合もある。
【0006】
この対策として、例えば、特許文献1(特開2018-95112号公報)には、自車両がカーブに進入した際の横加速度又はヨーレートが所定しきい値を超えた場合、減速させる技術が開示されている。
【先行技術文献】
【特許文献】
【0007】
特開2018-95112号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述した特許文献1に開示されている技術では、カーブへの進入速度の超過を、予め設定したしきい値と横加速度又はヨーレートとで一律に判定している。しかし、一般道路のカーブの曲率は一定ではない。又、峠道のようにカーブが連続している場合もある。
【0009】
このような一般道路のカーブ路において、自車両に発生する横加速度又はヨーレートと、予め設定したしきい値とを比較して、減速するか否かを一律に判定した場合、カーブの曲率によっては、運転者は過剰減速、或いは減速不足を体感することとなり、不快感を覚えさせてしまう。
【0010】
本発明は、カーブを自動車速制御で走行するに際し、運転者に不快感を与えることなく、スムーズに通過させることのできる車両の運転支援装置を提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社SUBARU
無段変速機
4日前
株式会社SUBARU
動力伝達装置
3日前
株式会社SUBARU
車両側部構造
8日前
株式会社SUBARU
車両前部構造
8日前
株式会社SUBARU
車両前部構造
9日前
株式会社SUBARU
車両用制御装置
7日前
株式会社SUBARU
バルブユニット
11日前
株式会社SUBARU
締結構造、及び、締結方法
今日
株式会社SUBARU
車両のフロントフード構造
4日前
株式会社SUBARU
油量調整機構及び油量調整方法
1日前
個人
飛行自動車
3か月前
個人
車窓用防虫網戸
17日前
個人
警告装置
1か月前
個人
小型EVシステム
1か月前
個人
車輪清掃装置
今日
日本精機株式会社
ケース
1か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
照明装置
2か月前
個人
アンチロール制御装置
2か月前
日本精機株式会社
表示装置
2か月前
個人
ワイパーゴム性能保持具
9日前
株式会社松華
懸架装置
2か月前
個人
ブレーキシステム
1か月前
株式会社クラベ
ヒータユニット
15日前
横浜ゴム株式会社
タイヤ
1か月前
井関農機株式会社
収穫作業車両
16日前
個人
ステージカー
2か月前
個人
自動車ドア開度規制ベルト
1か月前
個人
自走式立体型洗車場
2か月前
株式会社ユーシン
照明装置
1か月前
井関農機株式会社
作業車両
28日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ