TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025073252
公報種別
公開特許公報(A)
公開日
2025-05-13
出願番号
2023183858
出願日
2023-10-26
発明の名称
情報処理システム及び情報処理方法
出願人
株式会社ON BOARD
,
国立大学法人 東京大学
代理人
弁理士法人創光国際特許事務所
主分類
G05D
1/243 20240101AFI20250502BHJP(制御;調整)
要約
【課題】ネットワークの状態の変動によらず、移動体が動作を継続できるようにする。
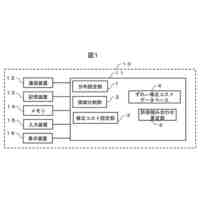
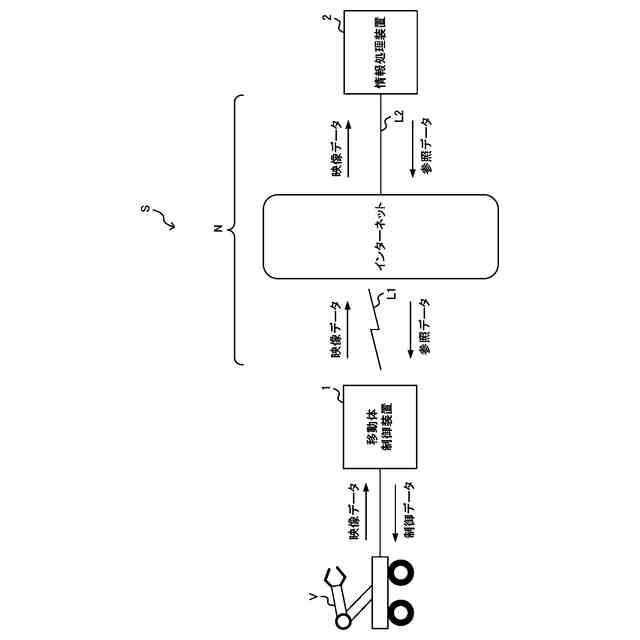
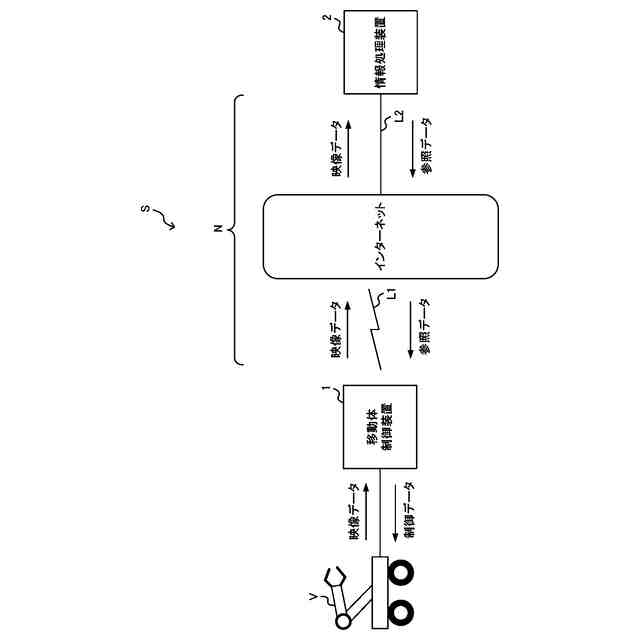
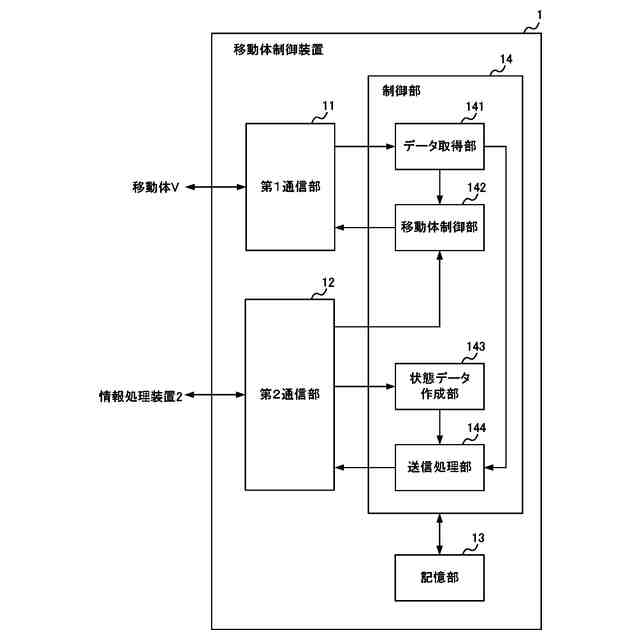
【解決手段】情報処理システムは、移動体Vを制御する移動体制御装置1と情報処理装置2とを備える。移動体制御装置1は、ネットワークNの状態を示す状態データを情報処理装置2に送信し、情報処理装置2から受信した画像パラメータに対応する映像データを情報処理装置2に送信する。情報処理装置2は、状態データが示すネットワークNの状態に基づいて決定した画像パラメータと、受信した映像データに基づいて参照データと、を移動体制御装置1に送信する。移動体制御装置1は、ネットワークNの状態によって、参照データに基づく移動体Vの制御方法を変化させる。
【選択図】図1
特許請求の範囲
【請求項1】
移動体を制御する移動体制御装置と、ネットワークを介して前記移動体制御装置と通信する情報処理装置と、を備え、
前記移動体制御装置は、
前記移動体に設けられた撮像部が生成した撮像画像データを取得するデータ取得部と、
前記情報処理装置が前記ネットワークを介して前記移動体制御装置に送信した参照データの受信状況に基づいて、前記ネットワークの状態を示す状態データを作成する状態データ作成部と、
前記状態データを前記情報処理装置に送信した後に前記情報処理装置から送信された画像パラメータに基づいて、前記撮像画像データに基づく送信画像データを前記情報処理装置に送信する送信処理部と、
前記移動体を制御する移動体制御部と、
を有し、
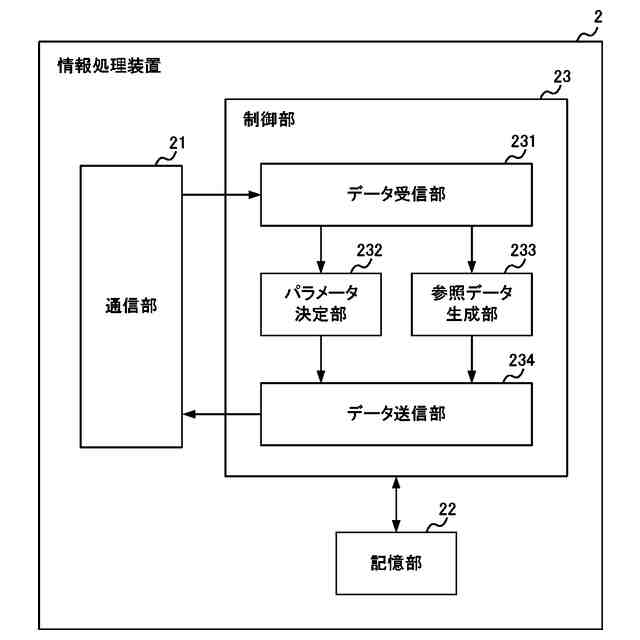
前記情報処理装置は、
前記状態データ及び前記送信画像データを受信するデータ受信部と、
前記状態データが示す前記ネットワークの状態に基づいて、前記移動体制御装置に送信する前記画像パラメータを決定するパラメータ決定部と、
前記送信画像データに基づいて、前記移動体の周囲の状態に対応する前記参照データを生成する参照データ生成部と、
前記画像パラメータと、前記参照データと、を前記移動体制御装置に送信するデータ送信部と、
を有し、
前記移動体制御部は、前記ネットワークの状態によって、前記参照データに基づく前記移動体の制御方法を変化させる情報処理システム。
続きを表示(約 1,400 文字)
【請求項2】
前記データ送信部は、前記移動体から所定範囲内の他の物体の位置に関する情報を示す前記参照データを前記移動体制御装置に送信し、
前記移動体制御部は、前記参照データが示す前記他の物体の位置に基づいて前記移動体を制御する、
請求項1に記載の情報処理システム。
【請求項3】
前記移動体制御部は、前記情報処理装置から前記参照データが送信されない間は、前記撮像画像データに基づいて前記移動体を制御する、
請求項2に記載の情報処理システム。
【請求項4】
前記情報処理装置は、前記ネットワークの状態と画像パラメータの値とを関連付けて記憶する記憶部をさらに有し、
前記パラメータ決定部は、前記状態データが示す前記ネットワークの状態に関連付けて前記記憶部に記憶された前記画像パラメータを選択する、
請求項1に記載の情報処理システム。
【請求項5】
前記状態データは、前記ネットワークの帯域幅を示すデータであり、
前記データ送信部は、前記状態データが示す前記帯域幅が小さいほど、前記移動体制御装置が前記情報処理装置に送信する前記送信画像データのデータ量が小さい前記画像パラメータを送信する、
請求項1に記載の情報処理システム。
【請求項6】
前記状態データは、前記ネットワークの伝送遅延量を示すデータであり、
前記データ送信部は、前記状態データが示す前記伝送遅延量が大きいほど、前記移動体制御装置が前記情報処理装置に送信する前記送信画像データのデータ量が小さい前記画像パラメータを送信する、
請求項1に記載の情報処理システム。
【請求項7】
前記状態データは、前記ネットワークの帯域幅であり、
前記データ送信部は、前記状態データが示す前記帯域幅が帯域幅閾値以下である場合に、前記送信画像データの送信を停止させるための送信停止命令データを前記移動体制御装置に送信する、
請求項1に記載の情報処理システム。
【請求項8】
前記状態データは、前記ネットワークの伝送遅延量を示すデータであり、
前記データ送信部は、前記状態データが示す前記伝送遅延量が遅延閾値以上である場合に、前記送信画像データの送信を停止させるための停止命令データを前記移動体制御装置に送信する、
請求項1に記載の情報処理システム。
【請求項9】
前記参照データには、前記情報処理装置において計測された時刻を示す時刻データが含まれており、
前記状態データ作成部は、前記時刻データが示す時刻と前記移動体制御装置において計測した時刻との差を前記受信状況として用いて、前記差が大きいほど前記ネットワークの帯域幅が小さいこと又は前記ネットワークの伝送遅延量が大きいことを示す前記状態データを作成する、
請求項1に記載の情報処理システム。
【請求項10】
前記パラメータ決定部は、前記ネットワークの状態が所定の条件を満たす時間が所定時間以上継続した場合に、過去に決定した前記画像パラメータよりも大きなデータ量に対応する新たな前記画像パラメータを決定する、
請求項1に記載の情報処理システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体を制御するための情報処理システム及び情報処理方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、無人運転車両において撮影された画像のデータをネットワーク経由でクラウドサーバに送信し、クラウドサーバが画像を解析した結果に基づいて無人運転車両を制御するシステムが知られている(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-023969号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ネットワークにおけるデータ伝送に使用できる帯域幅は変動する。帯域幅が不足してしまうと、移動体において撮影された画像のデータが正常にクラウドサーバに伝送されなくなるためクラウドサーバによる移動体の制御が適切に行われず、移動体の動作を継続できなくなるという問題があった。
【0005】
そこで、本発明はこれらの点に鑑みてなされたものであり、ネットワークの状態の変動によらず、移動体が動作を継続できるようにすることを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1の態様の情報処理システムは、移動体を制御する移動体制御装置と、ネットワークを介して前記移動体制御装置と通信する情報処理装置と、を備え、前記移動体制御装置は、前記移動体に設けられた撮像部が生成した撮像画像データを取得するデータ取得部と、前記情報処理装置が前記ネットワークを介して前記移動体制御装置に送信した参照データの受信状況に基づいて、前記ネットワークの状態を示す状態データを作成する状態データ作成部と、前記状態データを前記情報処理装置に送信した後に前記情報処理装置から送信された画像パラメータに基づいて、前記撮像画像データに基づく送信画像データを前記情報処理装置に送信する送信処理部と、前記移動体を制御する移動体制御部と、を有し、前記情報処理装置は、前記状態データ及び前記送信画像データを受信するデータ受信部と、前記状態データが示す前記ネットワークの状態に基づいて、前記移動体制御装置に送信する前記画像パラメータを決定するパラメータ決定部と、前記送信画像データに基づいて、前記移動体の周囲の状態に対応する前記参照データを生成する参照データ生成部と、前記画像パラメータと、前記参照データと、を前記移動体制御装置に送信するデータ送信部と、を有し、前記移動体制御部は、前記ネットワークの状態によって、前記参照データに基づく前記移動体の制御方法を変化させる。
【0007】
前記データ送信部は、前記移動体から所定範囲内の他の物体の位置に関する情報を示す前記参照データを前記移動体制御装置に送信し、前記移動体制御部は、前記参照データが示す前記他の物体の位置に基づいて前記移動体を制御してもよい。
【0008】
前記移動体制御部は、前記情報処理装置から前記参照データが送信されない間は、前記撮像画像データに基づいて前記移動体を制御してもよい。
【0009】
前記情報処理装置は、前記ネットワークの状態と画像パラメータの値とを関連付けて記憶する記憶部をさらに有し、前記パラメータ決定部は、前記状態データが示す前記ネットワークの状態に関連付けて前記記憶部に記憶された前記画像パラメータを選択してもよい。
【0010】
前記状態データは、前記ネットワークの帯域幅を示すデータであり、前記データ送信部は、前記状態データが示す前記帯域幅が小さいほど、前記移動体制御装置が前記情報処理装置に送信する前記送信画像データのデータ量が小さい前記画像パラメータを送信してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
12日前
株式会社ダイヘン
移動体
17日前
ローム株式会社
半導体集積回路
27日前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
12日前
トヨタ自動車株式会社
ペダル機構
1か月前
三栄ハイテックス株式会社
基準電圧回路
1か月前
三菱電機株式会社
自己位置推定装置
1か月前
株式会社オプトン
制御プログラム生成装置
10日前
株式会社鷺宮製作所
制御装置
11日前
株式会社ダイヘン
負荷時タップ切換器
17日前
株式会社ダイフク
物品搬送設備
3日前
株式会社ダイフク
物品搬送設備
26日前
株式会社ダイフク
物品搬送設備
10日前
トヨタ自動車株式会社
移動体、及び制御方法
1か月前
株式会社ダイフク
物品搬送設備
10日前
株式会社タブチ
減圧弁
2か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
23日前
シンフォニアテクノロジー株式会社
異常検知装置
10日前
オムロン株式会社
安全装置
10日前
WHILL株式会社
電動モビリティ
1か月前
株式会社計数技研
移動体、及びプログラム
1か月前
ローム株式会社
半導体装置
1か月前
日本信号株式会社
自走式装置
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社デンソー
診断装置
2か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社日立製作所
製造工程管理システム
11日前
FCLコンポーネント株式会社
電源回路および検出装置
2か月前
株式会社大林組
作業機械の自動運転制御システム
26日前
株式会社アイシン
自律移動体
1か月前
株式会社アイシン
自律移動体
1か月前
株式会社アイシン
自律移動体
1か月前
株式会社豊田自動織機
無人搬送車両
20日前
エイブリック株式会社
ボルテージレギュレータ及び半導体装置
27日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ