TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025070400
公報種別
公開特許公報(A)
公開日
2025-05-02
出願番号
2023180694
出願日
2023-10-20
発明の名称
情報処理装置、これを用いた情報処理システム、情報処理方法、及び情報処理プログラム
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G06T
7/00 20170101AFI20250424BHJP(計算;計数)
要約
【課題】 誤情報による制御を防止して複数センサによる情報の補完、冗長化ができる情報処理装置を提供する。
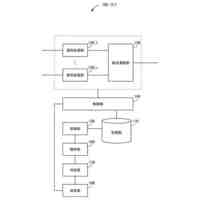
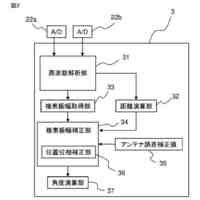
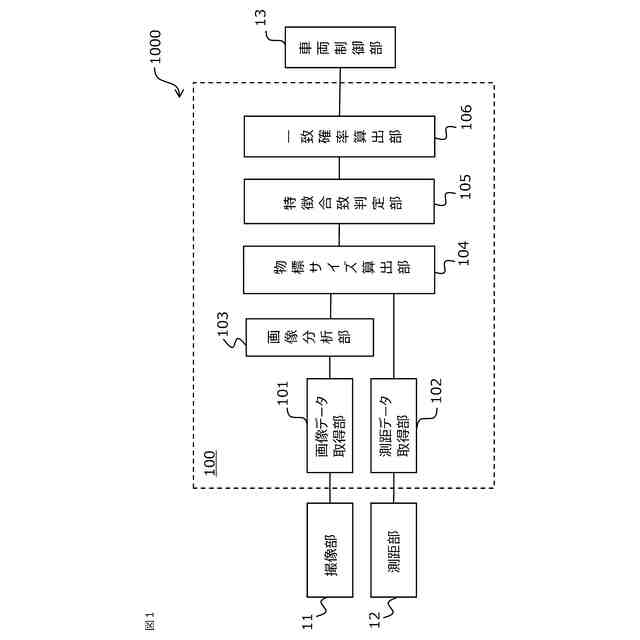
【解決手段】 測距部の検出範囲内に存在する測距物標までの測定距離を取得する測距データ取得部と、検出範囲に重なる撮像範囲の画像データを撮像部から取得する画像データ取得部と、画像データに含まれ、分析対象とした対象撮像物標の特徴を分析する画像分析部と、対象撮像物標に対応する測距物標を推定測距物標とし、推定測距物標までの測定距離、画像データから得た対象撮像物標の画像サイズに基づいて、物標サイズを算出する物標サイズ算出部と、物標サイズが対象撮像物標の特徴に合致するか否かを判定する特徴合致判定部と、合致すると判定された場合、推定測距物標を対象測距物標と判定し、対象撮像物標と対象測距物標が一致する一致確率を算出する一致確率算出部とを備える。
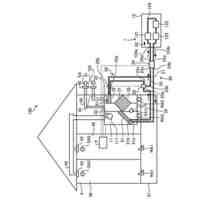
【選択図】図1
特許請求の範囲
【請求項1】
測距部により検出された前記測距部の検出範囲内に存在する測距物標までの測定距離を取得する測距データ取得部と、
前記検出範囲に少なくとも一部が重なるように設定された撮像範囲の画像データを撮像部から取得する画像データ取得部と、
前記画像データに含まれ、分析対象に設定した撮像物標である対象撮像物標の特徴を分析する画像分析部と、
前記対象撮像物標に対応すると推定される前記測距物標を推定測距物標として設定し、前記測距データ取得部により取得された前記推定測距物標までの前記測定距離、及び前記画像データから得た前記対象撮像物標の画像サイズに基づいて、物標サイズを算出する物標サイズ算出部と、
前記物標サイズが、前記画像分析部で分析された前記対象撮像物標の前記特徴に合致するか否かを判定する特徴合致判定部と、
前記特徴合致判定部で合致すると判定された場合、前記推定測距物標を前記対象撮像物標に対応する対象測距物標と判定し、前記対象撮像物標の領域情報及び前記対象測距物標の領域情報に基づいて、前記対象撮像物標と前記対象測距物標が一致する一致確率を算出する一致確率算出部と、
を備える情報処理装置。
続きを表示(約 1,200 文字)
【請求項2】
前記画像分析部は、物標の前記特徴と、第一閾値及び第二閾値との関係が予め設定された閾値設定マップデータを参照して、前記対象撮像物標の前記特徴に対応する前記第一閾値及び前記第二閾値を演算し、
前記特徴合致判定部は、前記物標サイズが、前記第一閾値以上前記第二閾値以下である場合に合致すると判定する請求項1に記載の情報処理装置。
【請求項3】
前記特徴として、物標の種別、又は物標の種別に加え、物標の姿勢、及び物標の向きの少なくともいずれかが含まれる請求項1に記載の情報処理装置。
【請求項4】
前記物標サイズ算出部は、前記物標サイズとして、高さ、幅、及び面積の少なくともいずれかを算出する請求項1に記載の情報処理装置。
【請求項5】
前記一致確率算出部は、前記特徴合致判定部で合致しないと判定された場合、前記対象撮像物標と前記推定測距物標が一致する一致確率を、不一致を表す値に設定する請求項1に記載の情報処理装置。
【請求項6】
前記一致確率算出部は、前記一致確率が許容値以上である場合に、前記対象撮像物標と前記対象測距物標のデータを結合させる結合部を備える請求項1に記載の情報処理装置。
【請求項7】
前記一致確率算出部は、前記一致確率が許容値以上である場合に、車両走行に用いる情報とする請求項6に記載の情報処理装置。
【請求項8】
周辺の地図データを取得する地図データ取得部と、現在位置を取得する位置情報取得部とを備え、
前記画像分析部は、前記地図データと前記現在位置とを用いて、前記検出範囲に対応する地図範囲の前記地図データから物標情報を取得し、取得した前記物標情報に基づいて、前記第一閾値及び前記第二閾値の少なくともいずれかを決定する請求項2に記載の情報処理装置。
【請求項9】
周辺の地図データを取得する地図データ取得部と、現在位置を取得する位置情報取得部とを備え、
前記画像分析部は、取得された前記現在位置の周辺の前記地図データに含まれる道路情報に基づいて、前記画像データから得た前記対象撮像物標の前記画像サイズ、又は、前記第一閾値及び前記第二閾値の少なくともいずれかを補正する請求項2に記載の情報処理装置。
【請求項10】
前記一致確率算出部は、
前記特徴合致判定部で合致すると判定された場合、
前記画像データから、前記推定測距物標の撮像面上の領域を示す暫定領域を特定し、前記暫定領域と前記対象撮像物標が撮影されている領域である物標領域との重なりの大きさを用いて、前記対象撮像物標と前記対象測距物標とが一致する可能性を示す一致確率を算出する請求項1に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、情報処理装置、これを用いた情報処理システム、情報処理方法、及び情報処理プログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
走行位置、速度等を自動制御して、車両を目的地まで走行させる自動運転支援システム、自動運転システム等が検討されている。これらのシステムでは、車両の周辺情報について、カメラ、ミリ波レーダ、LiDAR(Light Detection And Ranging)等、測定原理の異なる複数のセンサで情報を取得して互いに補完しあったり、同じ役割の要素を取得して待機(いわゆる冗長化)させたりして、取得する情報の精度を向上させている。
【0003】
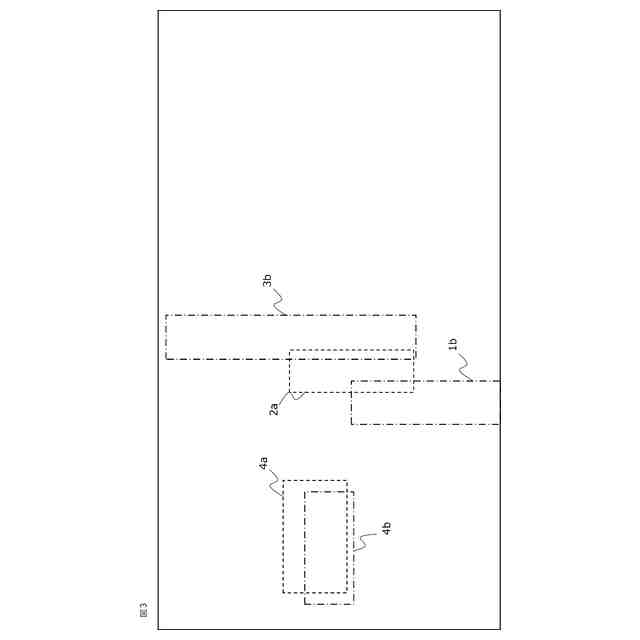
例えば特許文献1には、ミリ波レーダとカメラを用いてセンサフュージョンを行う情報処理システムが開示されている。この技術によれば、ミリ波レーダにより複数の物標の距離及び方向を検出するとともに、ミリ波レーダの検出範囲に撮像範囲が重なるように、カメラで画像を撮像する。そして撮像物標による領域情報及び測距物標による領域情報に基づいて撮像物標と測距物標とが一致する可能性を示す一致確率を算出することにより、正しい測距物標を撮像物標に対応づける。
【先行技術文献】
【特許文献】
【0004】
特許第7154470号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
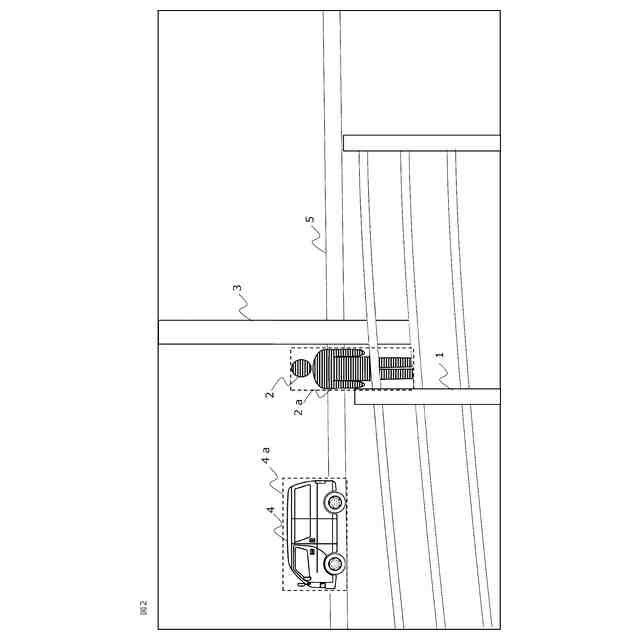
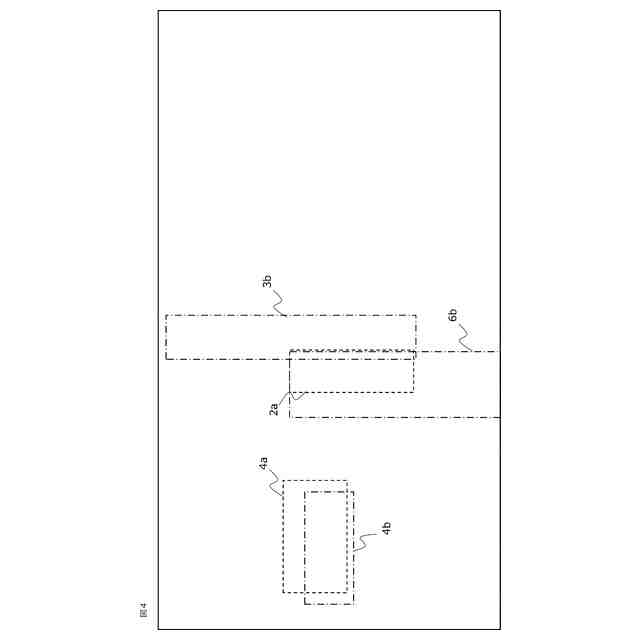
しかしながら従来の技術では、例えば物体の手前、周辺等に他の物体が存在する状態で、誤って手前の物体、周辺の物体を測距物標として距離を測定した場合でも、誤って取得された測距物標による領域と撮像物標による領域の重なりが大きければ、同一物標であると判断されるおそれがある。
このような場合には、複数センサによる情報の補完、冗長化が達成できないばかりか、誤情報に基づき、車両制御等を誤る可能性があるという問題がある。
【0006】
本開示は、上述の課題を解決するためになされたものであり、誤情報による制御を防止して複数センサによる情報の補完、冗長化ができる情報処理装置を提供することを目的とする。またこれを用いた情報処理システム、情報処理方法、及び情報処理プログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
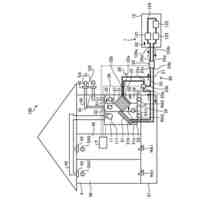
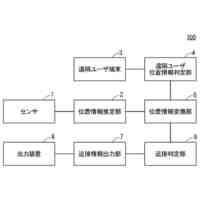
本開示に係る情報処理装置は、測距部により検出された測距部の検出範囲内に存在する測距物標までの測定距離を取得する測距データ取得部と、検出範囲に少なくとも一部が重なるように設定された撮像範囲の画像データを撮像部から取得する画像データ取得部と、画像データに含まれ、分析対象に設定した撮像物標である対象撮像物標の特徴を分析する画像分析部と、対象撮像物標に対応すると推定される測距物標を推定測距物標として設定し、測距データ取得部により取得された推定測距物標までの測定距離、及び画像データから得た対象撮像物標の画像サイズに基づいて、物標サイズを算出する物標サイズ算出部と、物標サイズが、画像分析部で分析された対象撮像物標の特徴に合致するか否かを判定する特徴合致判定部と、特徴合致判定部で合致すると判定された場合、推定測距物標を対象撮像物標に対応する対象測距物標と判定し、対象撮像物標の領域情報及び対象測距物標の領域情報に基づいて、対象撮像物標と対象測距物標が一致する一致確率を算出する一致確率算出部とを備える。
【0008】
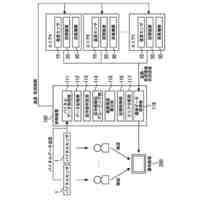
本開示に係る情報処理システムは、検出範囲内に存在する測距物標までの測定距離を検出する測距部と、測距部の検出範囲に少なくとも一部が重なるように設定された撮像範囲の画像データを撮像する撮像部と、本開示に係る情報処理装置と、情報処理装置から送信されたデータに基づき車両を制御する車両制御部とを備える。
【0009】
本開示に係る情報処理方法は、測距部により検出された測距部の検出範囲内に存在する測距物標までの測定距離を取得する測距データ取得ステップと、検出範囲に少なくとも一部が重なるように設定された撮像範囲の画像データを撮像部から取得する画像データ取得ステップと、画像データに含まれ、分析対象に設定した撮像物標である対象撮像物標の特徴を分析する画像分析ステップと、対象撮像物標に対応すると推定される測距物標を推定測距物標として設定し、測距データ取得ステップで取得された推定測距物標までの測定距離、及び画像データから得た対象撮像物標の画像サイズに基づいて、物標サイズを算出する物標サイズ算出ステップと、物標サイズが、画像分析ステップで分析された対象撮像物標の特徴に合致するか否かを判定する特徴合致判定ステップと、特徴合致判定ステップで合致すると判定された場合、推定測距物標を対象撮像物標に対応する対象測距物標と判定し、対象撮像物標の領域情報及び対象測距物標の領域情報に基づいて、対象撮像物標と対象測距物標が一致する一致確率を算出する一致確率算出ステップとを備える。
【0010】
本開示に係る情報処理プログラムは、測距部により検出された測距部の検出範囲内に存在する測距物標までの測定距離を取得する測距データ取得ステップと、検出範囲に少なくとも一部が重なるように設定された撮像範囲の画像データを撮像部から取得する画像データ取得ステップと、画像データに含まれ、分析対象に設定した撮像物標である対象撮像物標の特徴を分析する画像分析ステップと、対象撮像物標に対応すると推定される測距物標を推定測距物標として設定し、測距データ取得ステップで取得された推定測距物標までの測定距離、及び画像データから得た対象撮像物標の画像サイズに基づいて、物標サイズを算出する物標サイズ算出ステップと、物標サイズが、画像分析ステップで分析された対象撮像物標の特徴に合致するか否かを判定する特徴合致判定ステップと、特徴合致判定ステップで合致すると判定された場合、推定測距物標を対象撮像物標に対応する対象測距物標と判定し、対象撮像物標の領域情報及び対象測距物標の領域情報に基づいて、対象撮像物標と対象測距物標が一致する一致確率を算出する一致確率算出ステップとをコンピュータに実行させる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷蔵庫
1か月前
三菱電機株式会社
送風機
3日前
三菱電機株式会社
発光装置
11日前
三菱電機株式会社
照明器具
4日前
三菱電機株式会社
放電装置
11日前
三菱電機株式会社
加熱調理器
5日前
三菱電機株式会社
光通信装置
11日前
三菱電機株式会社
半導体装置
12日前
三菱電機株式会社
半導体装置
12日前
三菱電機株式会社
半導体装置
28日前
三菱電機株式会社
半導体装置
18日前
三菱電機株式会社
半導体装置
19日前
三菱電機株式会社
空調システム
3日前
三菱電機株式会社
半導体製造装置
21日前
三菱電機株式会社
換気空調システム
27日前
三菱電機株式会社
半導体モジュール
18日前
三菱電機株式会社
換気空調システム
27日前
三菱電機株式会社
換気空調システム
27日前
三菱電機株式会社
冷凍サイクル装置
1か月前
三菱電機株式会社
半導体モジュール
1か月前
三菱電機株式会社
アレーアンテナ装置
4日前
三菱電機株式会社
モータ及び送風装置
3日前
三菱電機株式会社
保護リレーシステム
18日前
三菱電機株式会社
手持ち式電気掃除機
4日前
三菱電機株式会社
移載装置及び吸着方法
28日前
三菱電機株式会社
水位変化検出システム
7日前
三菱電機株式会社
半導体チップ及び半導体装置
28日前
三菱電機株式会社
拡管工具および管の拡管方法
18日前
三菱電機株式会社
トルク締め個所検出システム
1か月前
三菱電機株式会社
送風システム及び空調システム
12日前
三菱電機株式会社
送風システム及び空調システム
12日前
三菱電機株式会社
バーチャルオフィス支援システム
19日前
三菱電機株式会社
信号伝達回路および電力変換装置
3日前
三菱電機株式会社
ベーパーチャンバー及び冷却装置
26日前
三菱電機株式会社
レーダ装置および物体位置検出方法
11日前
三菱電機株式会社
電気掃除機用吸込具及び電気掃除機
4日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ