TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025069139
公報種別
公開特許公報(A)
公開日
2025-04-30
出願番号
2025001768,2022542906
出願日
2025-01-06,2021-01-13
発明の名称
ナビゲーション支援手術中にオフセットをモニタするシステム及び方法
出願人
ストライカー・コーポレイション
代理人
個人
,
個人
,
個人
,
個人
主分類
A61B
34/20 20160101AFI20250422BHJP(医学または獣医学;衛生学)
要約
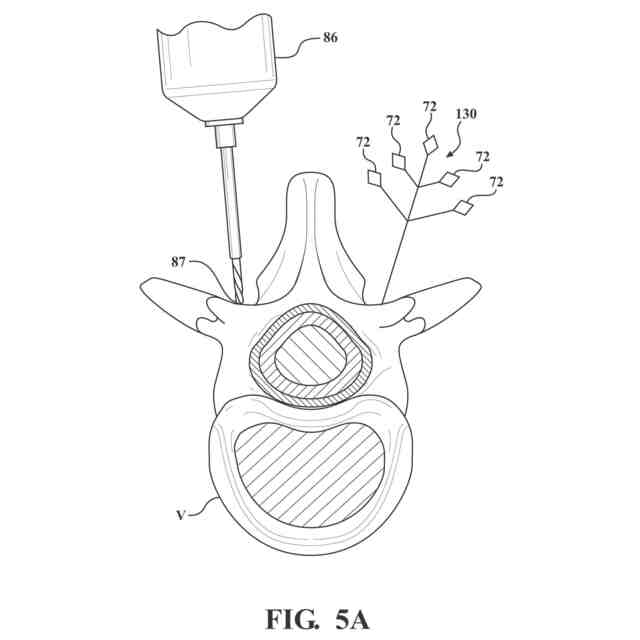
【課題】外科処置中に標的部位の近くの物理的な物体を追跡する外科用システム及び方法を提供する。
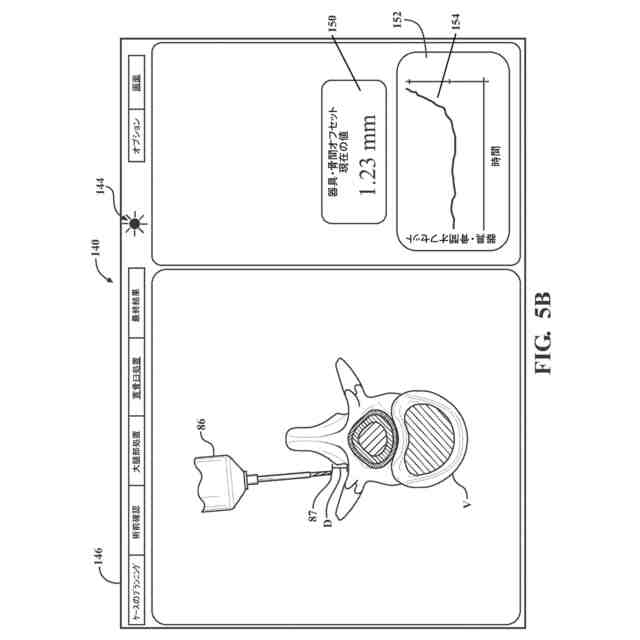
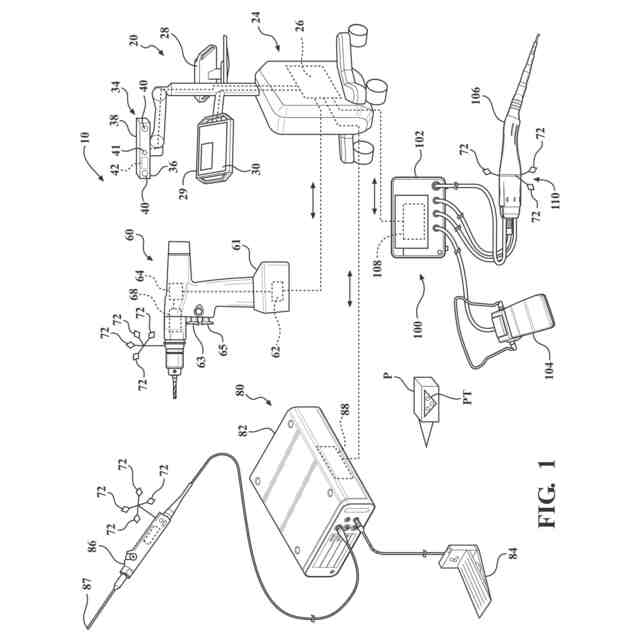
【解決手段】外科用システムには、ナビゲーションシステム及び外科用器具86が採用される。外科用器具上に器具トラッカが設けられ、患者の標的組織上に患者トラッカが設けられる。システム及び方法は、ナビゲーションガイダンスの精度を損なうエラー状態を検出し、工具・骨間オフセットDを追跡及びモニタする。オフセット距離は、共通座標系における工具先端部と追跡された生体構造との間の最小分離の大きさとして、又は共通座標系における工具先端部と追跡された生体構造との間の最大重複の大きさとして定義され得る。
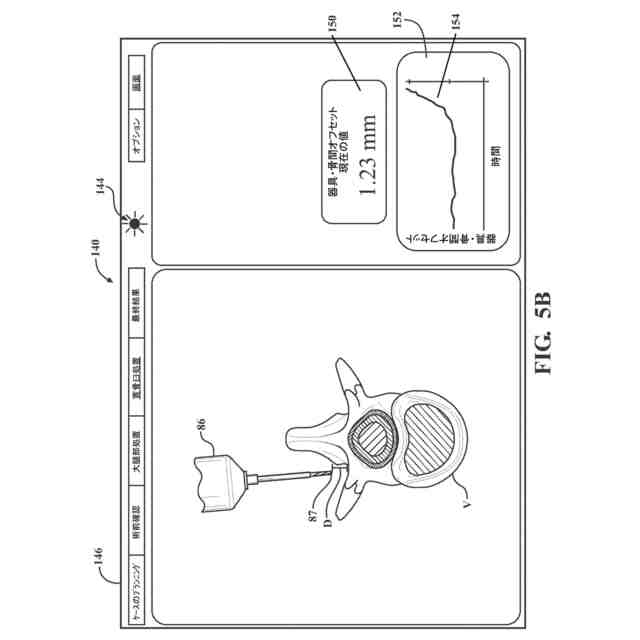
【選択図】図5B
特許請求の範囲
【請求項1】
可変速モータ及び工具先端部を有する外科用器具と、
前記外科用器具に電力を提供し、前記器具のモータの動作をモニタし、プロセッサと、
前記器具のモータの動作を表す情報を含む情報を記憶するメモリとを備えるコントローラ
と、
前記器具に接続される器具トラッカと、
骨に接続される患者トラッカと、
ローカライザを有するナビゲーションシステムと
を備え、
前記ナビゲーションシステムは、仮想空間において前記外科用器具を表す情報と前記骨
を表す情報とを記憶し、
前記ローカライザは、前記器具トラッカの位置と前記患者トラッカの位置とをローカラ
イザ座標系に対して合わせ、前記器具トラッカ及び前記患者トラッカとともに前記器具及
び前記骨の位置に関する情報をそれぞれ収集し、
前記ナビゲーションシステムは、前記ローカライザにより収集された情報に基づいて、
前記仮想空間における前記器具の位置及び前記骨の位置を追跡し、
前記コントローラ及び前記ナビゲーションシステムは、電子的に通信し、ともに、
前記モータの動作の変化に基づいて、前記工具先端部と前記骨との接触時間を求めるス
テップと、
前記接触時間において、前記工具先端部の追跡された位置と前記骨の追跡された位置と
の距離である工具・骨間オフセットを求めるステップと
を行う、
外科用システム。
続きを表示(約 2,100 文字)
【請求項2】
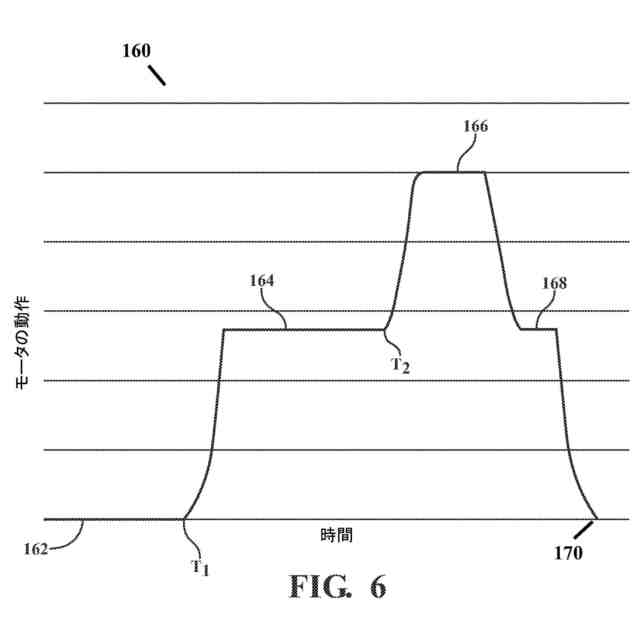
前記モータの動作をモニタすることは、電力レベルと、電圧レベルと、電流レベルと、
それらの組み合わせとのいずれかをモニタすることを含み、
前記モータの動作は、前記工具先端部が骨と接触していない間に動作したときの第1の
モータの動作と、前記第1のモータの動作とは異なり、前記工具先端部が骨と接触してい
る間に動作したときの第2のモータの動作とを含む、
請求項1に記載の外科用システム。
【請求項3】
アラートデバイスを更に備え、前記コントローラ及び前記ナビゲーションシステムは更
に、前記工具・骨間オフセットが所定の大きさを上回る場合にアクションをトリガする、
請求項1又は2に記載の外科用システム。
【請求項4】
前記アクションをトリガすることは、可聴アラートを鳴らすことと、可視アラートを表
示することと、触覚オルターを起動することと、前記外科用器具への電力を遮断すること
と、これらの組み合わせとのいずれかを含む、請求項3に記載の外科用システム。
【請求項5】
前記所定の大きさが0.5ミリメートルである、請求項3又は4に記載の外科用システ
ム。
【請求項6】
前記所定の大きさは、第1の所定の大きさと、前記第1の所定の大きさとは異なる第2
の所定の大きさとを含み、
前記コントローラ及び前記ナビゲーションシステムは、前記工具・骨間オフセットが第
1の所定の大きさを上回る場合に第1のアクションをトリガし、前記工具・骨間オフセッ
トが第2の所定の大きさを上回る場合に前記第1のアクションとは異なる第2のアクショ
ンをトリガする、
請求項3~5のいずれか一項に記載の外科用システム。
【請求項7】
前記コントローラ及び前記ナビゲーションシステムはともに、
医療処置中にモータの動作における変化の各々の発生を判定するステップと、
前記モータの動作の変化の各々の発生につき接触時間を求めるステップと、
各接触時点につき工具・骨間オフセットを求めるステップと、
求められた一連の工具・骨間オフセットを記録するステップと
を行う、請求項1~6のいずれか一項に記載の外科用システム。
【請求項8】
前記コントローラと前記ナビゲーションシステムと前記コントローラ及び前記ナビゲー
ションシステムの組み合わせとのいずれかと電子的に通信するディスプレイデバイスを更
に備え、
前記コントローラと、前記ナビゲーションシステムと、又は前記コントローラ及び前記
ナビゲーションシステムの組み合わせとのいずれかは、求められた前記工具・骨間オフセ
ットを前記ディスプレイデバイスに表示させるように更に構成されている、
請求項1~7のいずれか一項に記載の外科用システム。
【請求項9】
前記コントローラと、前記ナビゲーションシステムと、前記コントローラ及び前記ナビ
ゲーションシステムの組み合わせとのいずれかは、求められた一連の前記ツー・骨間オフ
セットを逐次的な更新値として前記ディスプレイデバイスに表示させるように更に構成さ
れている、請求項8に記載の外科用システム。
【請求項10】
アクチュエータ及び工具先端部を有する外科用器具と、
前記外科用器具に電力を提供し、前記器具のアクチュエータの動作をモニタし、プロセ
ッサと、前記器具のアクチュエータの動作を表す情報を含む情報を記憶するメモリとを備
えるコントローラと、
前記器具に接続される器具トラッカと、
組織に接続される患者トラッカと、
ローカライザを有するナビゲーションシステムと
を備え、
前記ナビゲーションシステムは、仮想空間において前記外科用器具を表す情報と前記組
織を表す情報とを記憶し、
前記ローカライザは、前記器具トラッカの位置と前記患者トラッカの位置とをローカラ
イザ座標系に対して合わせ、前記器具トラッカ及び前記患者トラッカとともに前記器具及
び前記組織の位置に関する情報をそれぞれ収集し、
前記ナビゲーションシステムは、前記ローカライザにより収集された情報に基づいて、
前記仮想空間における前記器具の位置及び前記組織の位置を術中に追跡し、
前記コントローラ及び前記ナビゲーションシステムは、電子的に通信し、ともに、
前記アクチュエータの動作の変化に基づいて、前記工具先端部と前記組織との接触時間
を求めるステップと、
前記接触時間において、前記工具先端部の追跡された位置と前記組織の追跡された位置
との距離である工具・骨間オフセットを求めるステップと
を行う、
外科用システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は概してコンピュータ支援手術に関する。より具体的には、患者に対する外科用
デバイスのモニタ位置のオフセットを判定するシステム及び技術が開示される。本技術は
、方法として、コンピュータプログラムの非一時的な媒体として、コンピューティングデ
バイスとして、及びコンピュータ支援手術のシステムとして実装することができる。
続きを表示(約 4,100 文字)
【0002】
[関連出願の相互参照]
本出願は、2020年7月22日に出願された米国仮特許出願第63/054,811
号及び2020年1月13日に出願された米国仮特許出願第62/960,218号の優
先権及び全ての利益を主張するものであり、これらの出願の全ての内容は引用することに
より本明細書の一部をなすものとする。
【背景技術】
【0003】
ナビゲーション支援手術は、多くの場合、磁気共鳴撮像(MRI)、コンピュータ断層
撮影(CT)、X線、又は他の撮像技術のうちの1つ以上を利用して、術前に撮像された
患者の生体構造(anatomy)に基づいて行われる。これらの技術を通じて生成されるデー
タは、非常に正確であり、ナビゲーションシステム内のメモリ又はナビゲーションシステ
ムと通信して記憶された対象の生体構造の仮想3次元(3D)モデルを生成するための基
礎を提供することができる。ナビゲーション支援手術中、患者トラッカを患者の生体構造
に関連付けることができ、工具トラッカを外科用工具に関連付けることができる。ナビゲ
ーションシステムは、当該ナビゲーションシステムの仮想空間内の関連するトラッカに基
づいて生体構造及び外科用工具の位置を特定し、追跡して、手術中に外科医又は他の医療
専門家に重要な情報を提供することができる。
【0004】
外科用ナビゲーションシステムは、産業用途、航空宇宙用途、及び医療用途において、
空間及び向きにおいて物理的な物体の位置を正確に特定し追跡するために使用される。特
に医療分野では、ナビゲーションシステムは、外科医又は他の医療専門家が、例えば外科
手術中に患者の標的部位に対して外科用器具を正確に配置することを支援することができ
る。標的部位は、通常、組織除去等の何らかの形態の療法又は治療を必要とする。従来の
ナビゲーションシステムはローカライザを採用しており、該ローカライザは1つ以上のセ
ンサを含み、該1つ以上のセンサは、トラッカと協働して、外科手術情報及び標的部位、
例えば、治療を必要とする組織の容積に関連付けられた位置及び/又は向きのデータを提
供する。これらのトラッカにより、外科医は、患者の術前撮像又は術中撮像に基づく工具
及び生体構造の仮想表現と併せて、モニタ上にオーバーレイされた外科用工具の位置及び
/又は向きを確認することが可能となる。また、これらのトラッカにより、ナビゲーショ
ンシステムが工具と生体構造との相対的な位置決めをモニタして、工具が生体構造に対し
て望ましくない位置に接近又は進入した場合にユーザに警告することが可能となる。例え
ば、工具による接触が意図されていない患者組織に工具が接近又は接触していることをユ
ーザに警告することが可能となる。
【0005】
ローカライザは、通常、トラッカの視野を有するものとなるように配置される。すなわ
ち、ローカライザは、患者の標的部位がローカライザの標的空間内にあるものとなるよう
に位置決めされる。トラッカは、基準(fiducial)又はマーカの識別可能なアレイを含み
、これらは、外科用器具又は患者の少なくとも一方に固定され、それぞれ外科用器具又は
患者とともに移動する。外科用ナビゲーションシステムは、トラッカの検出位置から、外
科用器具又は患者の位置及び向きを求め、求められた位置及び向きの経時的な変化をモニ
タすることができる。位置という用語は、外科用ナビゲーションシステムによって使用さ
れる基準座標系に対する物体の座標系の3D座標値を指す。向きという用語は、基準座標
系に対する物体の座標系のピッチ、ロール及びヨーを指す。位置並びに所与の向きの特定
のピッチ、ロール、及びヨーの値は、まとめて、基準座標系における物体の姿勢と呼ぶこ
とができる。位置及び向きの両方(すなわち姿勢)が定められると、物体は、外科用ナビ
ゲーションシステムにより認識され、外科用ナビゲーションシステムによって追跡可能と
なる(すなわち、外科用ナビゲーションシステムによって登録(記録、位置合わせ)され
る)。
【0006】
患者に取り付けられたトラッカ及び工具に取り付けられたトラッカは、骨及び治療を適
用する工具に堅固に固定され、それにより、骨又は工具の剛性、トラッカの剛性構造、及
びそれらの間の固定によって、標的部位及び工具に対して固定された関係が維持される。
当技術分野で既知の別の形態では、トラッカは、変形可能であり皮膚等の柔らかい組織に
取り付けることできる。トラッカは、剛性トラッカと同様の情報を提供する既知の変形に
従って、マーキング、マーカ、又は基準のパターン若しくは配列から構成される。外科用
工具及び患者に別々のトラッカを使用することにより、外科用器具の治療用の端部は、ナ
ビゲーションシステムにより支援された外科医によって標的部位に正確に位置決めするこ
とができる。
【0007】
手術の初期段階の間、物体は、それが外科用工具であるか又は患者の生体構造であるか
に関わらず、外科用ナビゲーションシステムに対して較正又は登録を行う必要がある。較
正又は登録のプロセスとは、物理的な物体とそのトラッカとの間の関係を、外科用ナビゲ
ーションシステム内のデータとしての物体及びトラッカの仮想表現として定めること、す
なわち、仮想物体データ及び仮想トラッカデータとしてそれぞれ定めることを指す。仮想
データは、物体又はトラッカのいずれの場合でも、物体のモデルであってもなくてもよい
。むしろ、仮想データは、特定の関心点を識別又は指定するのに十分な情報を含んでいて
もよく、物体の寸法特性に関する他の情報を更に含んでいてもよい。仮想データは、術前
又は術中に確立することができる。仮想データは、既存のモデリング又は物体仕様データ
に基づいてもよく、又は、その場(in situ)での物体の撮像に基づいてもよい。仮想デ
ータは、セグメンテーションのプロセスを通して撮像データから生成することができる。
例えば、患者の生体構造の術前撮像を用いて、外科用ナビゲーションシステムのメモリ及
び仮想環境内の仮想物体データとして、その生体構造の3Dモデルを生成することができ
る。同様に、外科用工具は、既知の幾何学形状及び構造に従って製造することができる。
この幾何形状及び構造は、外科用ナビゲーションシステムのメモリ及び仮想環境における
仮想物体データとして、その工具の3Dモデルにおいて表すことができる。較正を実行す
るために、追加のトラッカ基準アレイを有する追加の基準ポインタ又はフレームが、位置
合わせシステム又は較正システムに従って基準点をタッチオフするために必要となり得る
。あるいは、較正は、光学プロセスを用いて、投影された光パターン、光学認識、又は他
の従来の方法を使用して確立される場合がある。
【0008】
ローカライザは、典型的には、特定の手術の態様における有益な使用のために様々に適
合した複数のセンシング技術を備えている。一例では、ローカライザは、ナビゲーション
用に適した1つ以上のセンサを備え得る。1つ以上のナビゲーションセンサは、高周波数
のセンシングサイクルを動作させ、微小な時間増分にわたる微小な移動を正確に追跡する
ことによって、すなわち、高分解能の追跡データを提供することによって、ナビゲーショ
ン用に適合させることができる。
【0009】
ローカライザは、マシンビジョン又は手術に有益な他の用途に適したセンサを更に備え
得る。例えば、ローカライザは、外科手術のビデオ記録を提供するために1つ以上の光学
カメラを備えてもよい。ローカライザは、様々な機能を実行する、すなわち、様々な物理
的特性又は光、電磁エネルギー、又は他の特性をセンシングする、複数組の個別センサを
含み得る。ローカライザのセンサ出力を表すデータを処理し、ローカライザの視野又は範
囲内の手術部位に関する重要な情報を得ることができる。
【0010】
従来の外科用ナビゲーションシステムは、医療手術中に使用される外科用工具を支持す
るロボットアーム又はマニピュレータとともに使用するように適合している場合がある。
ロボットアームマニピュレータをナビゲーションシステムに組み込むことで、更に高度な
制御が提供され、外科用工具の動きがロボットアームによって、又はロボットアームの支
援により実現し、生体構造に対する工具の適切な配置ができるようになる。ジョイントエ
ンコーダ又は他のセンシング技術をロボットアームに組み込んで追加のデータを提供し、
工具がナビゲーションシステムにより追跡されている間に工具の位置を求めることができ
る。この情報を比較し、不一致が生じた場合には、オペレータに警告して、エラーが診断
され修正され得るまで外科手術を停止することができる。
【発明の概要】
【発明が解決しようとする課題】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
健康器具
5か月前
個人
歯茎みが品
6か月前
個人
短下肢装具
18日前
個人
鼾防止用具
5か月前
個人
脈波測定方法
5か月前
個人
マッサージ機
6か月前
個人
導電香
6か月前
個人
洗井間専家。
4か月前
個人
前腕誘導装置
22日前
個人
脈波測定方法
5か月前
個人
白内障治療法
4か月前
個人
嚥下鍛錬装置
1か月前
個人
歯の修復用材料
1か月前
個人
矯正椅子
2か月前
個人
バッグ式オムツ
1か月前
個人
片足歩行支援具
6か月前
個人
クリップ
6か月前
個人
ホバーアイロン
4か月前
個人
車椅子持ち上げ器
4か月前
個人
陣痛緩和具
1か月前
三生医薬株式会社
錠剤
4か月前
個人
歯の保護用シール
2か月前
個人
シャンプー
3か月前
個人
口内洗浄具
5か月前
個人
哺乳瓶冷まし容器
16日前
個人
眼科診療車
7か月前
個人
避難困難者救出台車
7か月前
株式会社八光
剥離吸引管
2か月前
株式会社 MTG
浴用剤
6か月前
株式会社コーセー
美爪料
6か月前
株式会社コーセー
化粧料
6か月前
個人
服薬支援装置
4か月前
株式会社結心
手袋
5か月前
個人
性行為補助具
8日前
個人
除菌システム
6か月前
株式会社大野
骨壷
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ