TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025067042
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2023176694
出願日
2023-10-12
発明の名称
搬送物ステーション
出願人
株式会社アマダ
代理人
個人
,
個人
,
個人
主分類
B65G
1/137 20060101AFI20250417BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】AMRが搬送物ステーションへ進入する際の進入精度を向上させることができる。
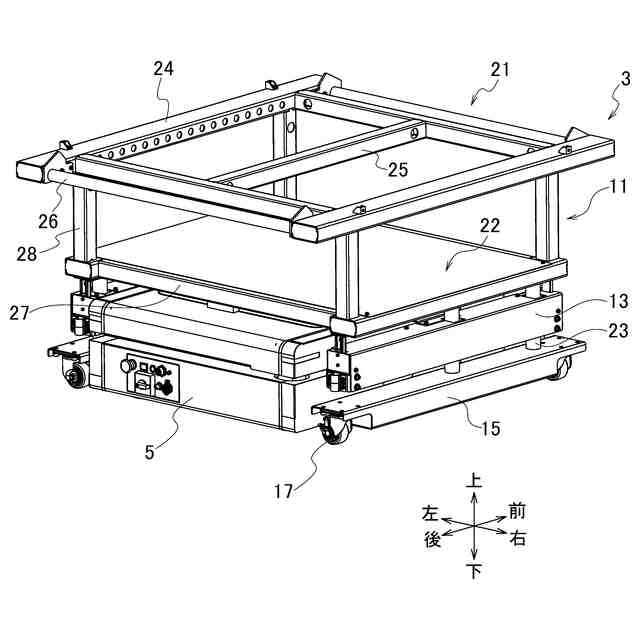
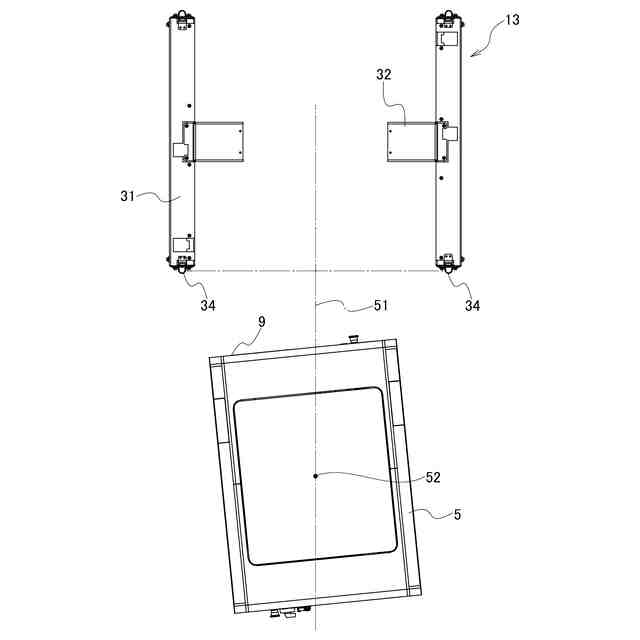
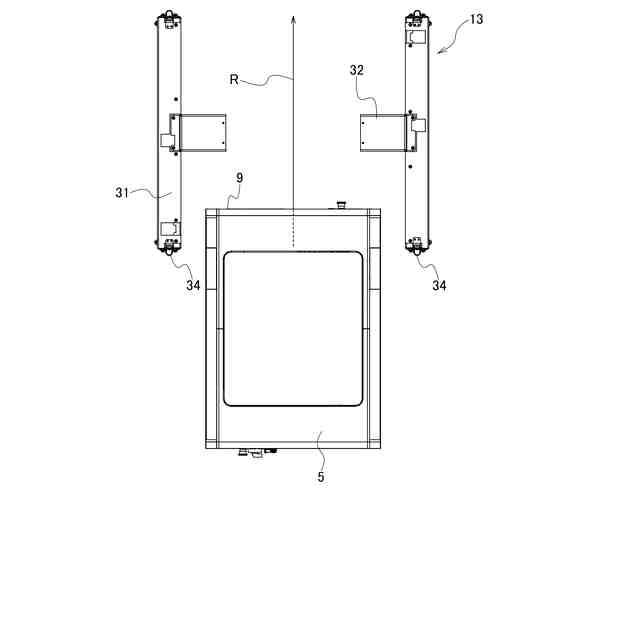
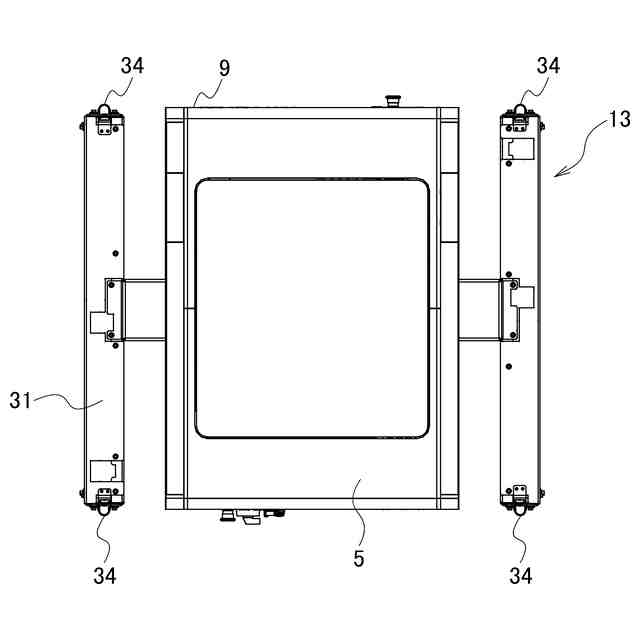
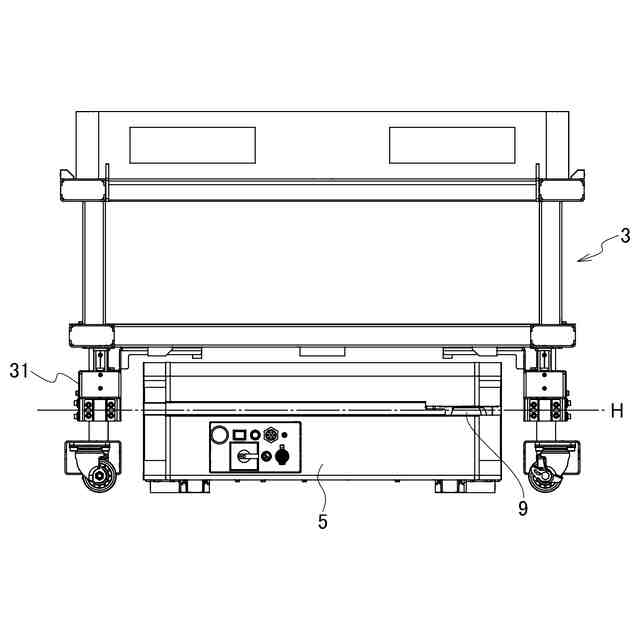
【解決手段】搬送物ステーション3は、上下方向に昇降するリフタ7を備えて自律的に走行するAMR5が下方へ進入できる高さに支持され、搬送物が載置される載置部11と、AMR5が載置部11の下方へ進入する進入経路Rを規定するガイド部材13とを備え、ガイド部材13は、AMR5が進入経路Rへ進入するときには物体検知センサ9の検知高さに配置され、AMR5が進入経路Rに進入して所定の停車位置で停車し、リフタ7を上昇させると、物体検知センサ9の検知高さよりも高い位置まで上昇する。
【選択図】図1
特許請求の範囲
【請求項1】
上下方向に昇降するリフタを備えて自律的に走行する搬送車両が下方へ進入できる高さに支持され、搬送物が載置される載置部と、
前記搬送車両が前記載置部の下方へ進入する進入経路を規定するガイド部材と、を備え、
前記ガイド部材は、前記搬送車両が前記進入経路へ進入するときには前記搬送車両が備える物体検知センサの検知高さに配置され、前記搬送車両が前記進入経路に進入して前記リフタを上昇させると、前記物体検知センサの検知高さよりも高い位置まで上昇する
搬送物ステーション。
続きを表示(約 1,200 文字)
【請求項2】
前記ガイド部材は、
前記進入経路の側面を形成して上下方向に移動可能に設けられた側壁部材と、
前記側壁部材から前記進入経路の上方に突出した形状を有するリフタ接触部材と、を備え、
前記側壁部材は、前記搬送車両が前記進入経路へ進入するときには前記物体検知センサの検知高さに配置され、
前記搬送車両が前記進入経路に進入して前記リフタを上昇させると、前記リフタ接触部材が前記リフタに接触して上昇し、前記側壁部材が前記物体検知センサの検知高さよりも高い位置まで上昇する
請求項1に記載の搬送物ステーション。
【請求項3】
前記搬送車両が前記進入経路に進入して前記リフタを上昇させたときに、前記リフタが接触する前記載置部の下面に位置決めブロックを設け、
前記位置決めブロックは、前記搬送車両が前記進入経路に進入して所定の停車位置からずれて停車したときに前記リフタを上昇させると、前記リフタの周縁部と接触する位置に配置され、前記停車位置の中心に向かって傾斜した形状を有する
請求項1または2に記載の搬送物ステーション。
【請求項4】
前記載置部は、複数の支柱によって前記搬送車両が下方へ進入できる高さに支持され、
前記複数の支柱の一部は、前記搬送車両が前記進入経路に進入して所定の停車位置で停車したときに、前記物体検知センサの検知範囲外の位置に配置されている
請求項1または2に記載の搬送物ステーション。
【請求項5】
前記複数の支柱の別の一部は、前記搬送車両が前記進入経路に進入して所定の停車位置で停車したときに、前記物体検知センサの検知範囲内の位置に配置されている
請求項4に記載の搬送物ステーション。
【請求項6】
前記リフタ接触部材は、前記リフタと接触する部分に樹脂材料の接触部が設けられている
請求項2に記載の搬送物ステーション。
【請求項7】
前記進入経路の出入口となる前記側壁部材の両端に、前記物体検知センサからの検出光を反射するマーカが設けられている
請求項2に記載の搬送物ステーション。
【請求項8】
前記マーカは、前記側壁部材に対して位置を調整可能に設けられている
請求項7に記載の搬送物ステーション。
【請求項9】
前記載置部を移動可能に支持するキャスター部をさらに備え、
前記リフタは、上下方向に昇降する凸状部材を備え、
前記リフタ接触部材は、前記凸状部材が挿入される貫通孔を備える
請求項2に記載の搬送物ステーション。
【請求項10】
前記凸状部材は、先端にテーパー形状を有する
請求項9に記載の搬送物ステーション。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送物ステーションに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
板金などの材料を加工する工場には、材料を載せたパレットを載置するための搬送物ステーションが設けられており、搬送車両が搬送物ステーションを移動させることで、材料の搬送が自動的に行われる。
【0003】
例えば、特許文献1には、無人搬送車が被搬送物を搬送する無人搬送システムが開示されている。特許文献1に開示された無人搬送システムでは、無人搬送車のセンサが認識可能なマーカを被搬送物の進入経路に設け、無人搬送車をマーカに当接させている。
【先行技術文献】
【特許文献】
【0004】
特開2021-149410号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した従来の無人搬送システムでは、搬送車両が搬送物ステーションへ進入する進入経路が明確に規定されていないので、搬送車両の進入精度が低下してしまうという問題点があった。
【課題を解決するための手段】
【0006】
本発明の一態様に係る搬送物ステーションは、上下方向に昇降するリフタを備えて自律的に走行する搬送車両が下方へ進入できる高さに支持され、搬送物が載置される載置部と、前記搬送車両が前記載置部の下方へ進入する進入経路を規定するガイド部材と、を備え、前記ガイド部材は、前記搬送車両が前記進入経路へ進入するときには前記搬送車両が備える物体検知センサの検知高さに配置され、前記搬送車両が前記進入経路に進入して前記リフタを上昇させると、前記物体検知センサの検知高さよりも高い位置まで上昇する。
【0007】
本発明の一態様に係る搬送物ステーションによれば、搬送車両が載置部の下方へ進入する進入経路を規定するためにガイド部材を設けたので、進入経路を明確に規定することができる。したがって、搬送車両が搬送物ステーションへ進入する際の進入精度を向上させることができる。
【発明の効果】
【0008】
本発明の一態様によれば、搬送車両が搬送物ステーションへ進入する際の進入精度を向上させることができる。
【図面の簡単な説明】
【0009】
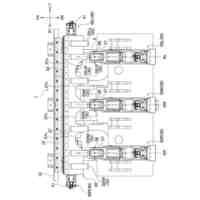
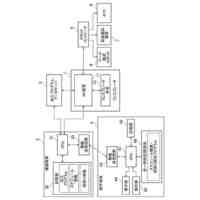
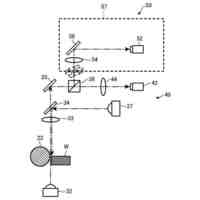
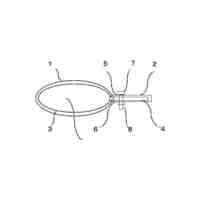
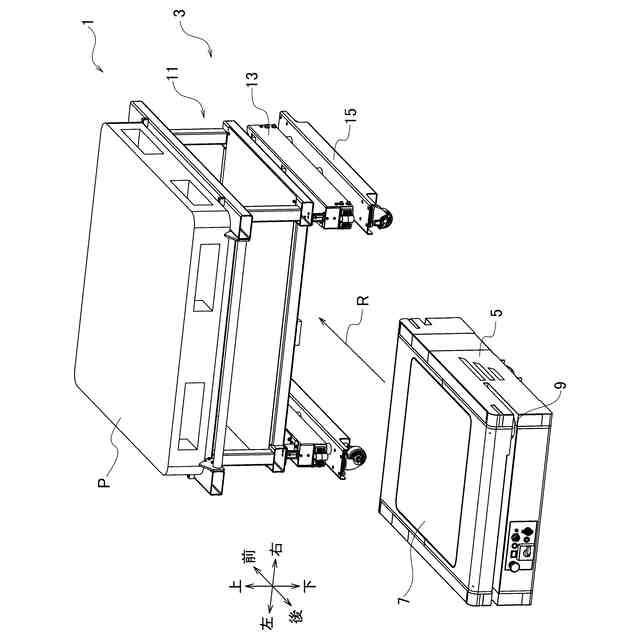
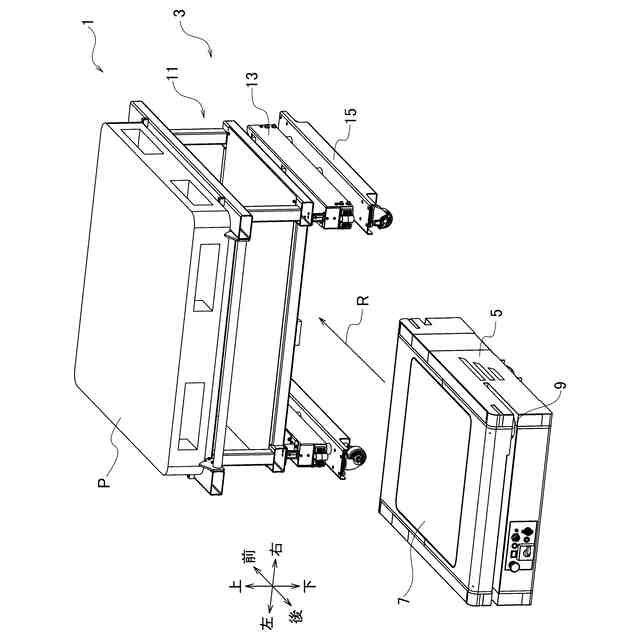
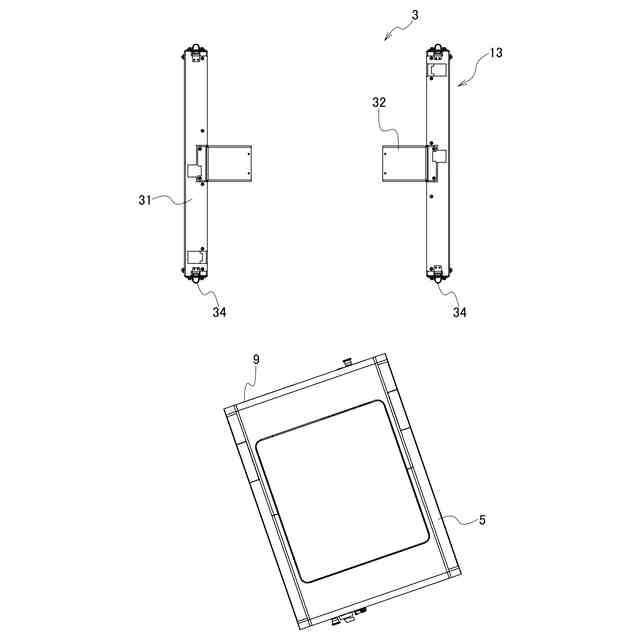
図1は、第1実施形態に係る搬送物ステーションを備えた搬送システムの構成を示す図である。
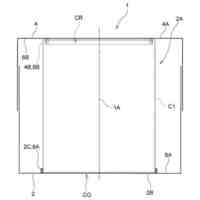
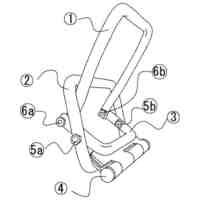
図2は、第1実施形態に係る搬送物ステーションの構造を示す斜視図である。
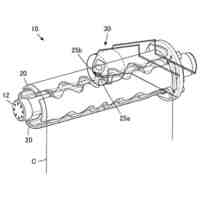
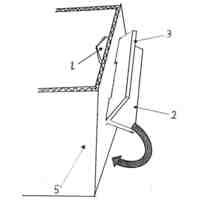
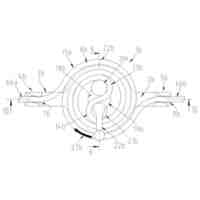
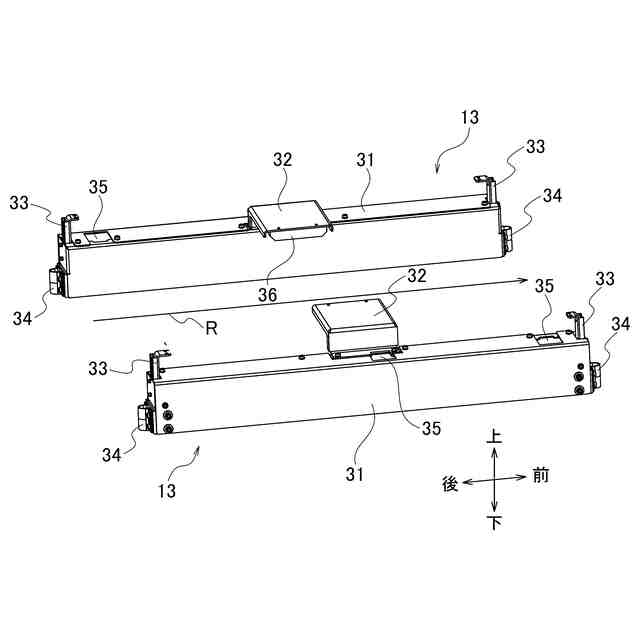
図3は、第1実施形態に係る搬送物ステーションのガイド部材の構造を示す斜視図である。
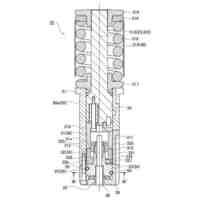
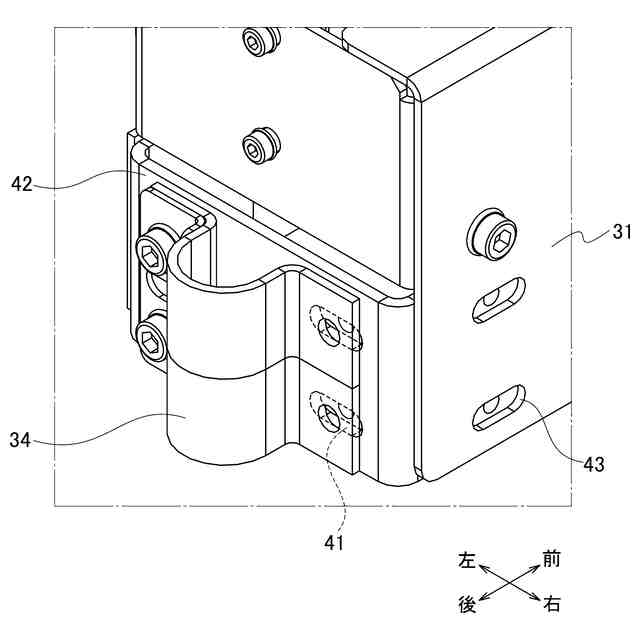
図4は、第1実施形態に係る搬送物ステーションのマーカの構造を示す斜視図である。
図5Aは、AMRが搬送物ステーションの進入経路へ進入する様子を説明するための図である。
図5Bは、AMRが搬送物ステーションの進入経路へ進入する様子を説明するための図である。
図5Cは、AMRが搬送物ステーションの進入経路へ進入する様子を説明するための図である。
図5Dは、AMRが搬送物ステーションの進入経路へ進入する様子を説明するための図である。
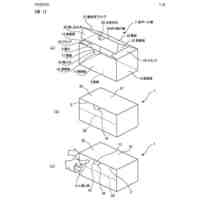
図6は、AMRの物体検知センサの検知高さと搬送物ステーションの側壁部材との位置関係を説明するための図である。
図7Aは、AMRがリフタで搬送物ステーションを持ち上げる動作を説明するための図である。
図7Bは、AMRがリフタで搬送物ステーションを持ち上げる動作を説明するための図である。
図7Cは、AMRがリフタで搬送物ステーションを持ち上げる動作を説明するための図である。
図7Dは、AMRがリフタで搬送物ステーションを持ち上げる動作を説明するための図である。
図7Eは、AMRがリフタで搬送物ステーションを持ち上げる動作を説明するための図である。
図8は、AMRのリフタの上昇量と搬送物ステーションとの関係を説明するための図である。
図9は、第1実施形態に係る搬送物ステーションの載置部の下面の構造を示す図である。
図10Aは、第1実施形態に係る搬送物ステーションの位置決めブロックの機能を説明するための図である。
図10Bは、第1実施形態に係る搬送物ステーションの位置決めブロックの機能を説明するための図である。
図10Cは、第1実施形態に係る搬送物ステーションの位置決めブロックの機能を説明するための図である。
図11は、AMRの物体検知センサの検知高さと搬送物ステーションの側壁部材との位置関係を説明するための図である。
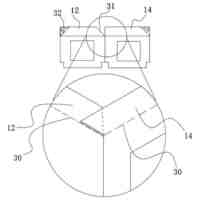
図12は、AMRの物体検知センサの検知範囲と搬送物ステーションの支柱との位置関係を説明するための図である。
図13は、第2実施形態に係る搬送物ステーションとAMRの構造を説明するための図である。
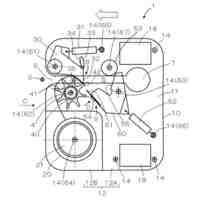
図14は、第2実施形態に係る搬送物ステーションのガイド部材の構造を示す図である。
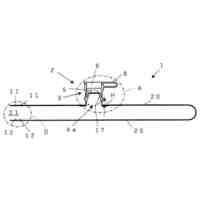
図15は、第2実施形態に係るAMRがリフタで搬送物ステーションと連結する動作を説明するための図である。
【発明を実施するための形態】
【0010】
[第1実施形態]
以下、図面を参照し、本実施形態に係る搬送物ステーションについて説明する。図1は、本実施形態に係る搬送物ステーションを備えた搬送システムの構成を示す図である。本実施形態に係る搬送システム1は、搬送物ステーション3と、搬送車両(以下、AMR(自律移動ロボット:Autonomous Mobile Robot))5とを含んでいる。搬送物ステーション3は、搬送物であるパレットPが載置されてAMR5によって移動される。AMR5は、物体検知センサ9によって周囲の物体を検出しながら自律的に走行する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アマダ
曲げ加工機
1か月前
株式会社アマダ
プレスブレーキ
3日前
株式会社アマダ
加工スケジュール設定装置
2日前
株式会社アマダ
線材送り装置及び送材方法
1か月前
株式会社アマダ
アンコイラ及びマンドレル
2か月前
株式会社アマダ
板材保護シートの剥離用金型
23日前
株式会社アマダ
ワーク接合方法及びワーク接合体
4日前
株式会社アマダ
プレスブレーキ及びプレスブレーキ制御方法
10日前
株式会社アマダ
レーザ加工機及び光学素子の中心位置補正方法
1か月前
株式会社アマダ
レーザ加工機
15日前
株式会社アマダ
板金の溶接方法、加工プログラムの作成方法及び加工プログラム作成装置
2か月前
株式会社アマダ
デジタル投影機、工作機械及び投影像表示方法
29日前
個人
箱
9か月前
個人
収容箱
16日前
個人
ゴミ箱
9か月前
個人
包装体
10か月前
個人
コンベア
2か月前
個人
段ボール箱
4か月前
個人
段ボール箱
4か月前
個人
ゴミ収集器
4か月前
個人
容器
6か月前
個人
楽ちんハンド
2か月前
個人
折り畳み水槽
10か月前
個人
パウチ補助具
9か月前
個人
宅配システム
4か月前
個人
角筒状構造体
2か月前
個人
土嚢運搬器具
5か月前
個人
お薬の締結装置
3か月前
個人
閉塞装置
7か月前
個人
コード類収納具
5か月前
個人
ダンボール宝箱
10か月前
個人
圧縮収納袋
10か月前
個人
蓋閉止構造
1か月前
株式会社コロナ
梱包材
2か月前
個人
ゴミ処理機
6か月前
株式会社和気
包装用箱
6か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ