TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025066577
公報種別
公開特許公報(A)
公開日
2025-04-23
出願番号
2023176278
出願日
2023-10-11
発明の名称
走行制御装置、走行制御方法、走行制御プログラム、及び車両の製造方法
出願人
株式会社デンソー
,
トヨタ自動車株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
B60L
15/20 20060101AFI20250416BHJP(車両一般)
要約
【課題】モータを駆動源とする車両の生産効率を向上させることが可能となる。
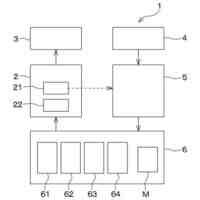
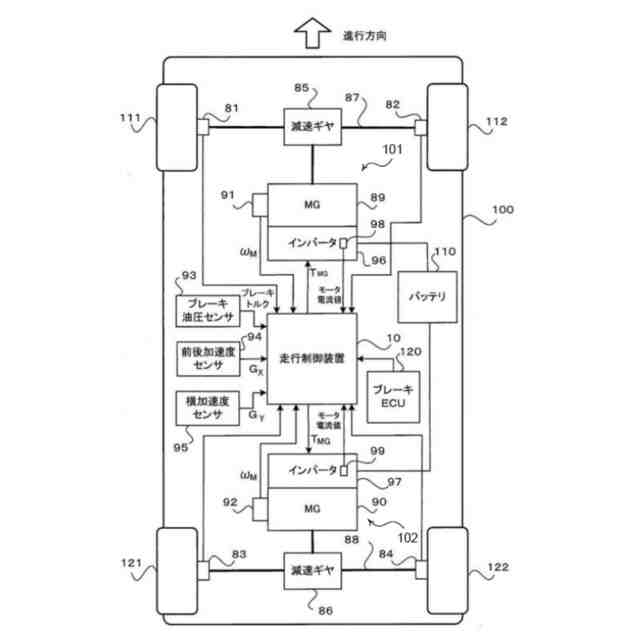
【解決手段】走行制御装置(10)は、車両(100)の製造工程において、モータ(89、90)を駆動源として自動走行可能な基本車両(100A)のタイヤ(111、112、121、122)の車輪速を取得する車輪速取得部(30)と、取得した前記車輪速に基づいて、低速で前記基本車両を走行させるための要求トルクを算出し、算出した要求トルクで前記モータが駆動されるように制御するトルク制御部(31)と、を備える。
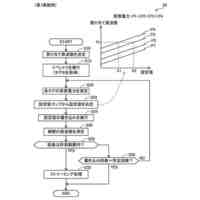
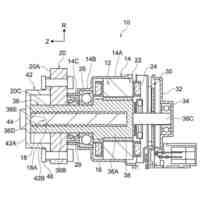
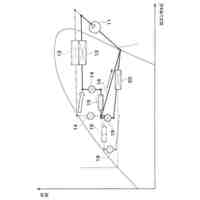
【選択図】図4
特許請求の範囲
【請求項1】
車両(100)の製造工程において、モータ(89、90)を駆動源として自動走行可能な基本車両(100A)のタイヤ(111、112、121、122)の車輪速を取得する車輪速取得部(30)と、
取得した前記車輪速に基づいて、低速で前記基本車両を走行させるための要求トルクを算出し、算出した要求トルクで前記モータが駆動されるように制御するトルク制御部(31)と、
を備えた走行制御装置(10)。
続きを表示(約 1,400 文字)
【請求項2】
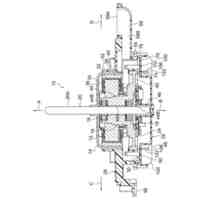
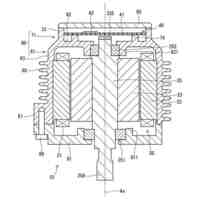
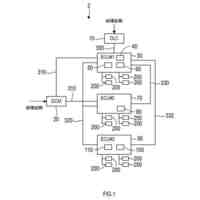
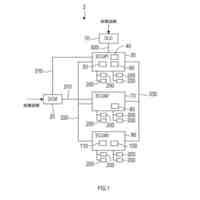
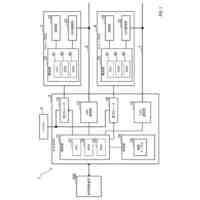
前記基本車両は、前記モータ、前記モータを駆動するインバータ(96、97)、及び前記モータの回転速度を減速させる減速ギヤ(85、86)が一体化された駆動ユニット(101、102)と、前記インバータに電力を供給するバッテリ(110)と、本走行制御装置と、を少なくとも含む
請求項1記載の走行制御装置。
【請求項3】
前記タイヤが接触している段差の高さを推定する段差推定部(32)と、
前記タイヤの回転中心軸の軌跡が路面に対してなす角度である軌跡角度の単位時間当たりの変化量と、前記段差の高さと、に基づいて、停止中の前記基本車両を自動走行させるために前記基本車両が押されたか否か、及び、自動走行中の前記基本車両を停止させるために前記基本車両を押されたか否か、の少なくとも一方を判定する判定部(33)と、を備え、
前記トルク制御部は、停止中の前記基本車両を自動走行させるために前記基本車両が押されたと判定された場合は、前記基本車両が自動走行させるための前記要求トルクを算出し、自動走行中の前記基本車両を停止させるために前記基本車両を押されたと判定された場合は、前記基本車両を停止させるための要求トルクを算出する
請求項1記載の走行制御装置。
【請求項4】
前記トルク制御部は、前記製造工程において前記基本車両を自動走行させる前に、前記車両の異常診断を行うダイアグフェールセーフ機能を停止させる制御を行う
請求項1記載の走行制御装置。
【請求項5】
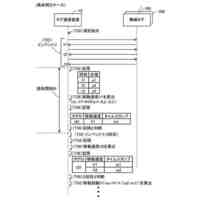
車両管理装置(2)から前記低速の目標車速を取得する目標車速取得部(34)を備え、
前記トルク制御部は、取得した前記目標車速で前記基本車両を走行させるための要求トルクを算出する
請求項1記載の走行制御装置。
【請求項6】
車両管理装置から操舵角を取得する操舵角取得部(35)と、
取得した操舵角に基づいて前記基本車両の操舵角を制御する操舵角制御部(36)と、
を備えた請求項1記載の走行制御装置。
【請求項7】
前記基本車両に部品が組み付けられる毎に車両管理装置から送信される前記基本車両の重量を取得する重量取得部(37)を備え、
前記トルク制御部は、前記基本車両の重量に基づいて前記要求トルクを算出する
請求項1記載の走行制御装置。
【請求項8】
前記低速は、1kph以上で且つ2kph以下の速度である
請求項1記載の走行制御装置。
【請求項9】
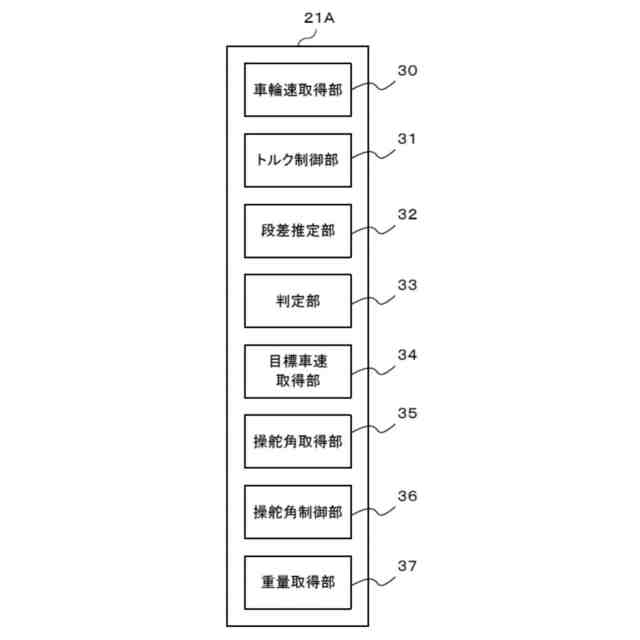
少なくとも1つのプロセッサ(21A)が、
車両の製造工程において、モータを駆動源として自動走行可能な基本車両のタイヤの車輪速を取得し、
取得した前記車輪速に基づいて、低速で前記基本車両を走行させるための要求トルクを算出し、算出した要求トルクで前記モータが駆動されるように制御する、
ことを含む処理を実行する走行制御方法。
【請求項10】
少なくとも1つのプロセッサに、
車両の製造工程において、モータを駆動源として自動走行可能な基本車両のタイヤの車輪速を取得し、
取得した前記車輪速に基づいて、低速で前記基本車両を走行させるための要求トルクを算出し、算出した要求トルクで前記モータが駆動されるように制御する、
ことを含む処理を実行させる走行制御プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、走行制御装置、走行制御方法、走行制御プログラム、及び車両の製造方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、前方車両を認識して追従しつつ、自動走行可能な自動車の製造方法であって、タイヤ及びホイールを含む走行部品と、前記ホイールを駆動する駆動源と、前記駆動源を動作させるための動力源を供給する動力供給装置と、前方車両を認識するためのセンサと、前記センサから取得した情報に基づいて、前記前方車両に追従して走行するように、前記駆動源を制御する制御装置と、を製造対象車両に組み付けて、当該製造対象車両を自動走行可能な状態とする第1組み付け工程と、前記第1組み付け工程よりも後に、前方において隣接する製造車両に追従するように前記製造対象車両を自動走行させつつ、当該製造対象車両に内装部品を組み付ける第2組み付け工程と、前記第2組み付け工程よりも後に、前記製造対象車両の完成車両を検査する検査工程と、を備える、自動車の製造方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-100179号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
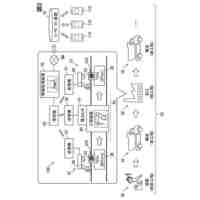
モータを駆動源とする車両を工場で製造する場合、車両を低速で自動走行させながら部品を組み付けていくことで生産効率を向上させることが可能となる。
【0005】
本開示は、モータを駆動源とする車両の生産効率を向上させることが可能となる走行制御装置、走行制御方法、走行制御プログラム、及び車両の製造方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の第1態様に係る走行制御装置は、車両の製造工程において、モータを駆動源として自動走行可能な基本車両のタイヤの車輪速を取得する車輪速取得部と、取得した前記車輪速に基づいて、低速で前記基本車両を走行させるための要求トルクを算出し、算出した要求トルクで前記モータが駆動されるように制御するトルク制御部と、を備える。
【0007】
第2態様に係る走行制御方法は、少なくとも1つのプロセッサが、車両の製造工程において、モータを駆動源として自動走行可能な基本車両のタイヤの車輪速を取得し、取得した前記車輪速に基づいて、低速で前記基本車両を走行させるための要求トルクを算出し、算出した要求トルクで前記モータが駆動されるように制御する、ことを含む処理を実行する。
【0008】
第3態様に係る走行制御プログラムは、少なくとも1つのプロセッサに、車両の製造工程において、モータを駆動源として自動走行可能な基本車両のタイヤの車輪速を取得し、取得した前記車輪速に基づいて、低速で前記基本車両を走行させるための要求トルクを算出し、算出した要求トルクで前記モータが駆動されるように制御する、ことを含む処理を実行させる。
【0009】
第4態様に係る車両の製造方法は、第1態様に係る走行制御装置を備えた自動走行な基本車両を自動走行させながら、前記基本車両に部品を順次組み付けることにより車両を製造する。
【発明の効果】
【0010】
本開示によれば、モータを駆動源とする車両の生産効率を向上させることが可能となる、という効果を有する。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソーエレクトロニクス
筐体
4日前
株式会社デンソー
操縦桿
1か月前
株式会社デンソー
モータ
17日前
株式会社デンソー
診断装置
3日前
株式会社デンソー
演算装置
3日前
株式会社デンソー
熱交換器
1か月前
株式会社デンソー
電池装置
11日前
株式会社デンソー
駆動装置
1か月前
株式会社デンソー
試験装置
13日前
株式会社デンソー
回転電機
18日前
株式会社デンソー
レーダ装置
17日前
株式会社デンソー
レーダ装置
4日前
株式会社デンソー
レーダ装置
4日前
株式会社デンソー
慣性センサ
10日前
株式会社デンソー
レーダ装置
10日前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
半導体装置
3日前
株式会社デンソー
半導体装置
13日前
株式会社デンソー
レーダ装置
11日前
株式会社デンソー
レーダ装置
11日前
株式会社デンソー
電流検出器
1か月前
株式会社デンソー
通信システム
18日前
株式会社デンソーウェーブ
タグ通信装置
18日前
株式会社デンソー
通信システム
18日前
株式会社デンソー
通信システム
19日前
株式会社デンソー
情報処理方法
24日前
株式会社デンソー
運転支援装置
1か月前
株式会社デンソー
通信システム
1か月前
株式会社デンソー
情報処理方法
1か月前
株式会社デンソーウェーブ
タグ通信装置
3日前
株式会社デンソー
基準電源回路
1か月前
株式会社デンソー
スパークプラグ
1か月前
株式会社デンソー
アクチュエータ
1か月前
株式会社デンソー
モータ制御装置
1か月前
株式会社デンソーテン
スロットアンテナ
12日前
株式会社デンソー
冷凍サイクル装置
25日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ