TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025039289
公報種別
公開特許公報(A)
公開日
2025-03-21
出願番号
2023146272
出願日
2023-09-08
発明の名称
モータ制御装置
出願人
株式会社デンソー
代理人
名古屋国際弁理士法人
主分類
H02P
6/16 20160101AFI20250313BHJP(電力の発電,変換,配電)
要約
【課題】モータが加速又は減速している場合でも、センサ信号を精度よく補正することが可能なモータの制御装置を提供する。
【解決手段】モータ制御装置は、複数のホール素子を含みブラシレスモータ20の回転位置を検出する位置センサから出力されたセンサ信号に基づいて、ブラシレスモータの回転を制御する。モータ制御装置は、時間算出部と、信号補正部と、を備える。時間算出部は、センサ信号に基づいて、ブラシレスモータが電気角360°回転するのに要する回転時間を算出する。信号補正部は、時間算出部により算出された過去の複数周期分の回転時間に基づいて、センサ信号を補正する。
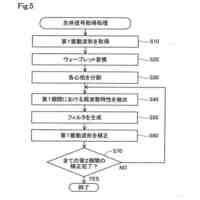
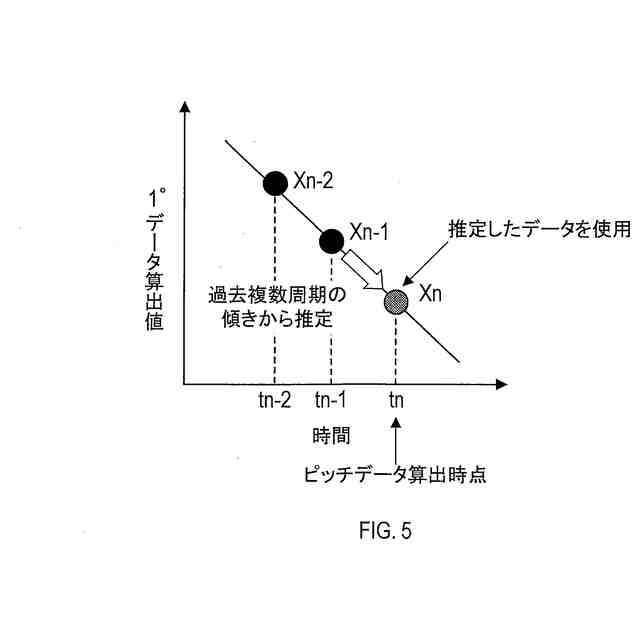
【選択図】図5
特許請求の範囲
【請求項1】
複数のホール素子(H1,H2,H3)を含みブラシレスモータ(20)の回転位置を検出する位置センサ(30)から出力されたセンサ信号に基づいて、前記ブラシレスモータの回転を制御するモータ制御装置(10)であって、
前記センサ信号に基づいて、前記ブラシレスモータが電気角360°回転するのに要する回転時間を算出する時間算出部(10)と、
前記時間算出部により算出された過去の複数周期分の前記回転時間に基づいて、前記センサ信号を補正する信号補正部(10)と、を備える、
モータ制御装置。
続きを表示(約 1,200 文字)
【請求項2】
前記時間算出部(10)により算出された前記過去の複数周期分の前記回転時間の各々を360で除して、前記過去の複数周期分の、前記モータが電気角1°回転するのに要する時間である1°データを算出する第1データ算出部(10)と、
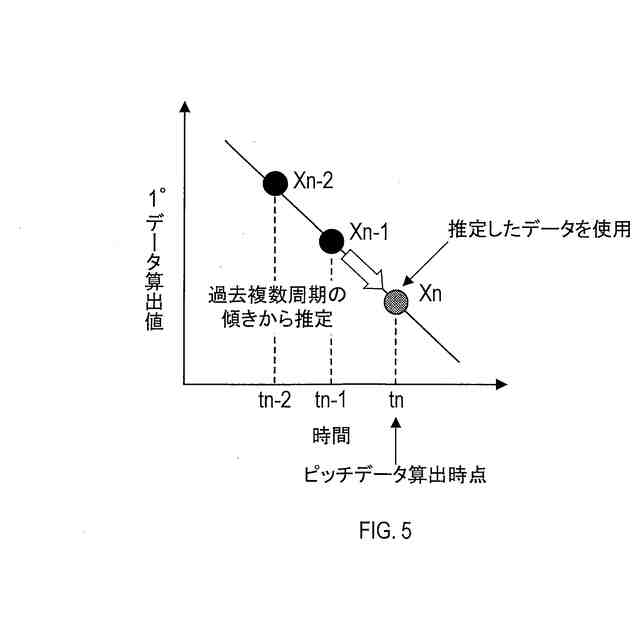
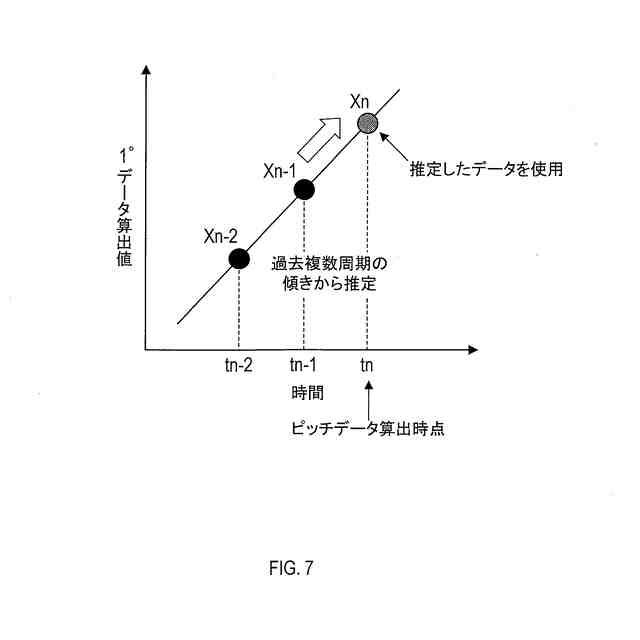
前記第1データ算出部により算出された前記過去の複数周期分の前記1°データの傾きから、現時点における前記1°データを推定するデータ推定部(10)と、
前記センサ信号のエッジから次のエッジまでの期間、前記データ推定部により推定された前記1°データをカウントアップして、前記期間において前記ブラシレスモータが回転した電気角に相当するピッチデータを算出する第2データ算出部(10)と、を更に備え、
前記信号補正部(10)は、前記第2データ算出部により算出された前記ピッチデータと基準値との差分に基づいて、前記センサ信号を補正する、
請求項1に記載のモータ制御装置。
【請求項3】
前記時間算出部(10)により算出された前記過去の複数周期分の前記回転時間の各々を360で除して、前記過去の複数周期分の、前記ブラシレスモータ(20)が電気角1°回転するのに要する時間である1°データを算出する第1データ算出部(10)と、
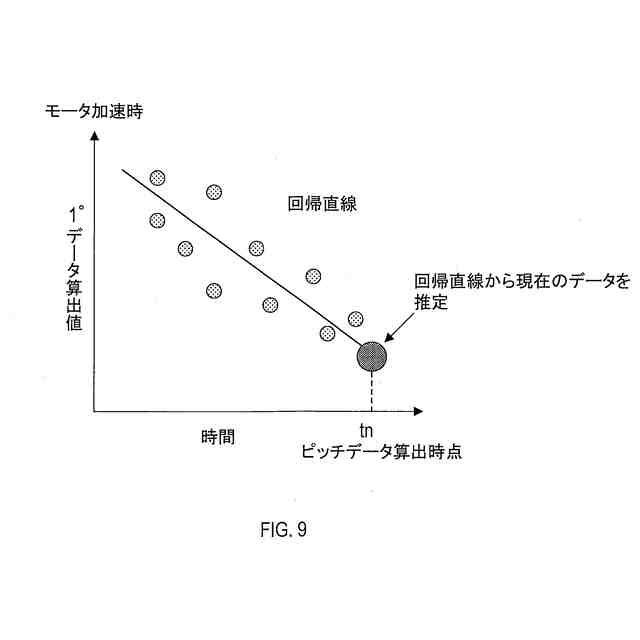
前記第1データ算出部により算出された前記過去の複数周期分の前記1°データに基づいた回帰直線から、現時点における前記1°データを推定するデータ推定部(10)と、
前記センサ信号のエッジから次のエッジまでの期間、前記データ推定部により推定された前記1°データをカウントアップして、前記期間において前記ブラシレスモータ(20)が回転した電気角に相当するピッチデータを算出する第2データ算出部(10)と、を更に備え、
前記信号補正部(10)は、前記第2データ算出部により算出された前記ピッチデータと基準値との差分に基づいて、前記センサ信号を補正する、
請求項1に記載のモータ制御装置。
【請求項4】
前記時間算出部(10)により算出された前記過去の複数周期分の前記回転時間に基づいて、現時点における前記回転時間を推定する時間推定部(10)と、
前記複数のホール素子(H1,H2,H3)のうちの1つから出力された前記センサ信号のアップエッジから次のアップエッジまでの時間、又は、前記1つから出力された前記センサ信号のダウンエッジから次のダウンエッジまでの時間と、前記時間推定部に推定された前記回転時間とから、前記アップエッジから前記次のアップエッジまでの期間又は前記ダウンエッジから前記次のダウンエッジまでの期間において前記ブラシレスモータ(20)が回転した電気角を算出する電気角算出部(10)と、を更に備え、
前記信号補正部(10)は、前記電気角算出部により算出された前記電気角と360°との差分に基づいて、前記センサ信号を補正する、
請求項1に記載のモータ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、モータの制御に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
引用文献1に記載のブラシレスモータの駆動制御装置は、回転位置検出センサの正規位置からの位置ずれ量を予め計測して記憶している。上記駆動制御装置は、記憶された位置ずれ量に応じて回転位置センサの回転センサ信号を補正し、補正した回転センサ信号に基づいて、ブラシレスモータの回転数を制御している。
【先行技術文献】
【特許文献】
【0003】
特開2005-110363号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
位置センサから出力されるセンサ信号の誤差は、位置センサの取り付け位置のずれだけでなく、磁気の読み取りのずれなどによっても生じる。そのため、上記駆動制御装置のように、位置センサの取り付け位置のずれに基づいて回転センサ信号を補正しても、回転センサ信号に誤差が残ることがあり得る。
【0005】
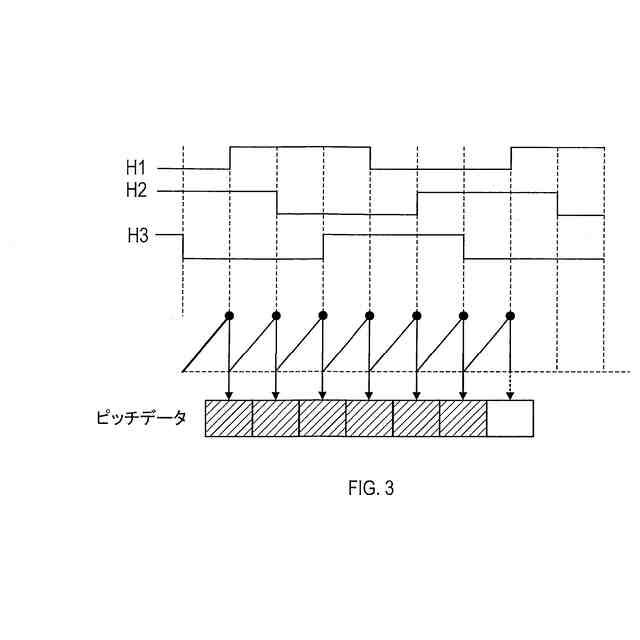
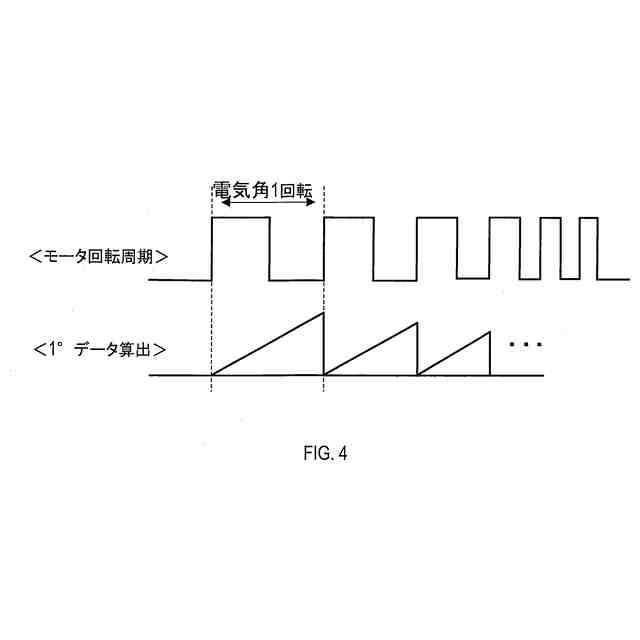
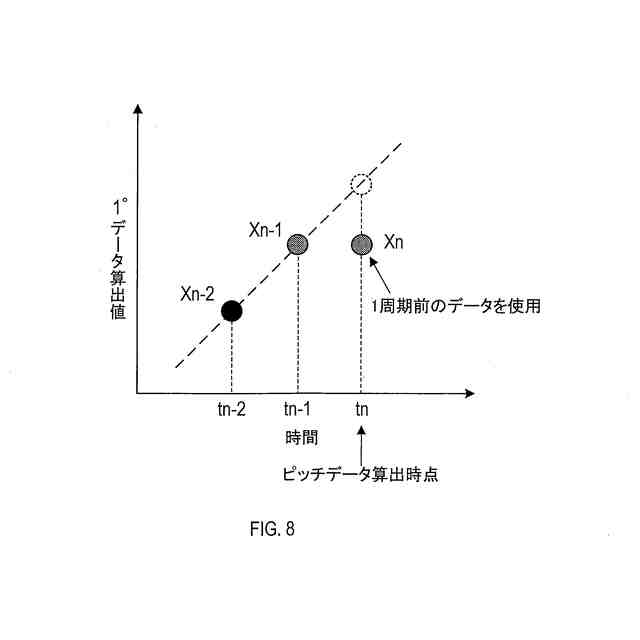
そこで、1°データに基づいてピッチデータを算出し、算出したピッチデータと、基準のピッチデータである電気角60°との差分に基づいて、センサ信号を補正する技術が提案されている。1°データは、モータが電気角1°回転するのに要する時間に相当し、ピッチデータは、センサ信号のエッジから次のエッジまでの間に、モータが回転した電気角に相当する。
【0006】
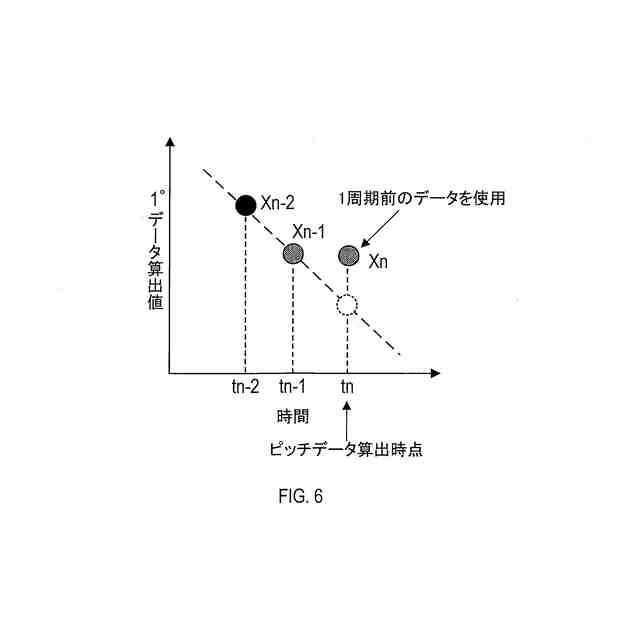
しかしながら、ピッチデータは、ピッチデータを算出する時点から電気角1周期前の1°データに基づいて算出される。そのため、モータが加速又は減速している場合、ピッチデータの算出に用いる1°データが真の値よりも大きく又は小さくなり、センサ信号の補正精度が低下し得る。
【0007】
本開示は、モータが加速又は減速している場合でも、センサ信号を精度よく補正することが可能なモータの制御装置を提供する。
【課題を解決するための手段】
【0008】
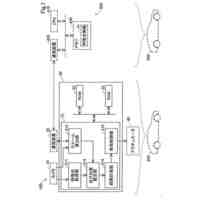
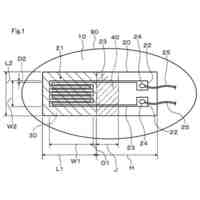
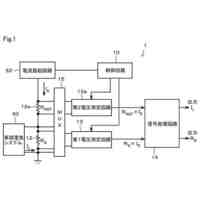
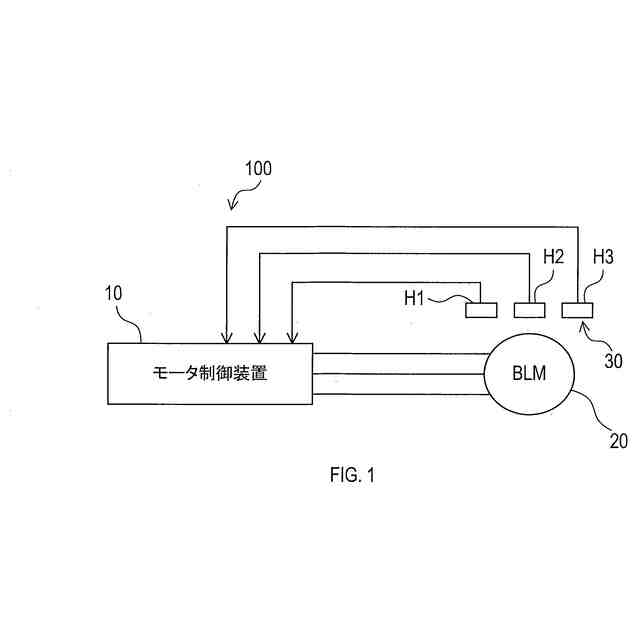
本開示の1つの局面のモータ制御装置(10)は、複数のホール素子(H1,H2,H3)を含みブラシレスモータ(20)の回転位置を検出する位置センサ(30)から出力されたセンサ信号に基づいて、ブラシレスモータの回転を制御する。モータ制御装置は、時間算出部(10)と、信号補正部(10)と、を備える。時間算出部は、センサ信号に基づいて、ブラシレスモータが電気角360°回転するのに要する回転時間を算出する。信号補正部は、時間算出部により算出された過去の複数周期分の回転時間に基づいて、センサ信号を補正する。
【0009】
本開示の1つの局面のモータ制御装置は、複数周期分の回転時間に基づいて、センサ信号を補正する。ブラシレスモータが加速している場合には、周期の経過に応じて回転時間は短くなり、モータが減速している場合には、周期の経過に応じて回転時間は長くなる。すなわち、複数周期分の回転時間には、ブラシレスモータの加速又は減速の情報が含まれる。したがって、複数周期分の回転時間を用いることにより、ブラシレスモータが加速又は減速している場合でも、センサ信号を精度良く補正することができる。
【図面の簡単な説明】
【0010】
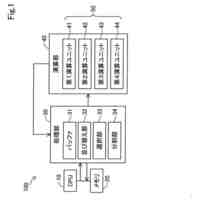
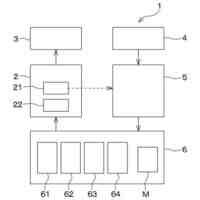
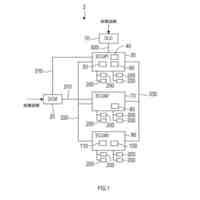
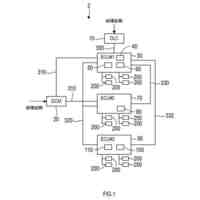
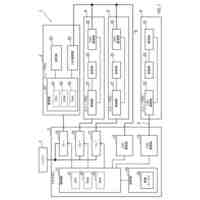
第1実施形態に係るモータシステムの構成を示すブロック図である。
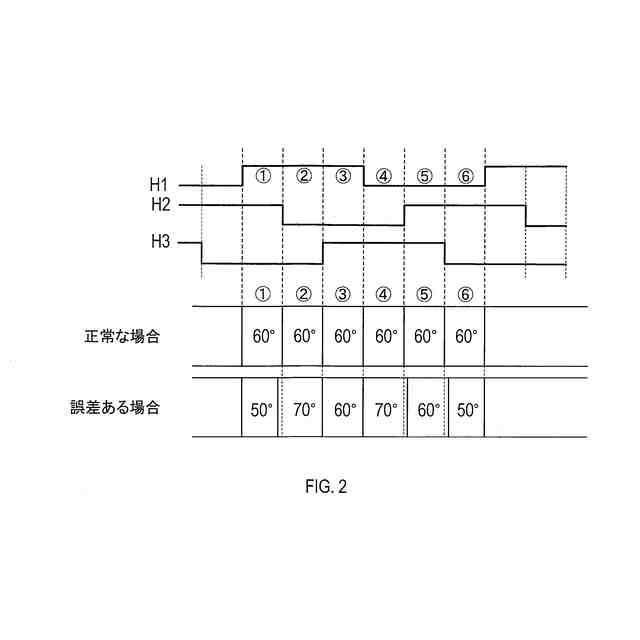
第1実施形態に係るホール素子の検出位置が正常な場合と誤差がある場合を示す図である。
第1実施形態に係るピッチデータを示す図である。
第1実施形態に係る1°データの算出を示す図である。
第1実施形態に係るモータの加速時における1°データの推定を示す図である。
参考例に係るモータの加速時における1°データの推定を示す図である。
第1実施形態に係るモータの減速時における1°データの推定を示す図である。
参考例に係るモータの減速時における1°データの推定を示す図である。
第2実施形態に係るモータの加速時における1°データの推定を示す図である。
第3実施形態に係る基準電気角タイマの推定を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソーエレクトロニクス
筐体
4日前
株式会社デンソー
モータ
17日前
株式会社デンソー
演算装置
3日前
株式会社デンソー
電池装置
11日前
株式会社デンソー
回転電機
18日前
株式会社デンソー
試験装置
13日前
株式会社デンソー
診断装置
3日前
株式会社デンソー
半導体装置
13日前
株式会社デンソー
慣性センサ
10日前
株式会社デンソー
レーダ装置
10日前
株式会社デンソー
レーダ装置
4日前
株式会社デンソー
レーダ装置
4日前
株式会社デンソー
レーダ装置
11日前
株式会社デンソー
半導体装置
3日前
株式会社デンソー
レーダ装置
11日前
株式会社デンソー
レーダ装置
17日前
株式会社デンソー
通信システム
19日前
株式会社デンソーウェーブ
タグ通信装置
3日前
株式会社デンソー
情報処理方法
24日前
株式会社デンソー
通信システム
18日前
株式会社デンソーウェーブ
タグ通信装置
18日前
株式会社デンソー
通信システム
18日前
株式会社デンソー
路面摩擦推定装置
18日前
株式会社デンソー
回転角度検出装置
11日前
株式会社デンソーウェーブ
光学情報読取装置
3日前
株式会社デンソーウェーブ
ロボットシステム
19日前
株式会社デンソーテン
スロットアンテナ
12日前
株式会社デンソー
自己位置推定装置
20日前
株式会社デンソー
二酸化炭素回収装置
12日前
株式会社デンソーウェーブ
移動体追跡システム
20日前
株式会社デンソーウェーブ
データ配信システム
17日前
株式会社デンソーウェーブ
歪ゲージの取付方法
18日前
株式会社デンソー
シャント式電流センサ
19日前
株式会社デンソー
生体信号検出システム
4日前
株式会社デンソー
酸性ガス回収システム
5日前
株式会社デンソーウェーブ
ロボット制御システム
16日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ