TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025062650
公報種別
公開特許公報(A)
公開日
2025-04-15
出願番号
2023171816
出願日
2023-10-03
発明の名称
測位システム、移動制御装置、移動制御方法、及びプログラム
出願人
日本電気株式会社
代理人
個人
主分類
G01S
5/02 20100101AFI20250408BHJP(測定;試験)
要約
【課題】地上に固定された基準局からの測位信号を用いて、高精度な搬送波位相測位を可能にする測位システム等を提供する。
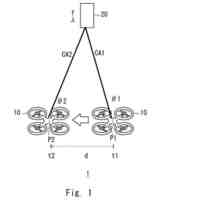
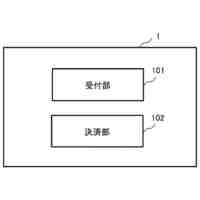
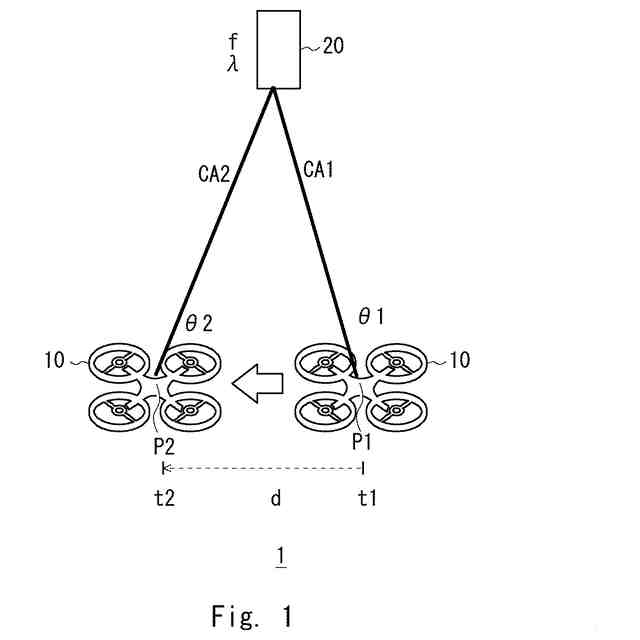
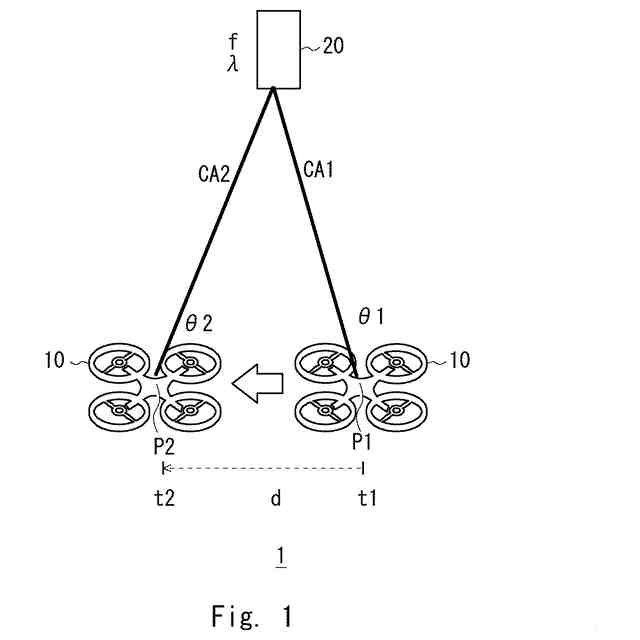
【解決手段】測位システムは、基準局と、移動体と、を備える。移動体は、基準局から測位信号を受信する測位信号受信手段と、受信した前記測位信号に基づき、移動体の移動を制御する制御手段と、を備える。制御手段は、第1時刻に、基準局からの測位信号の第1搬送波位相を取得する位相取得手段と、第1時刻から移動体を移動させて、時間間隔を経過した第2時刻において、基準局から測位信号を受信して、測位信号の第2搬送波位相を取得し、第1搬送波位相及び第2搬送波位相を用いて、移動体の搬送波位相測位を行う測位手段と、を備える。
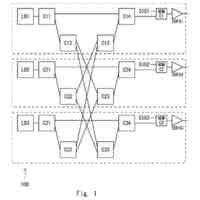
【選択図】図1
特許請求の範囲
【請求項1】
地上に固定された基準局と、移動体と、を備える測位システムであって、
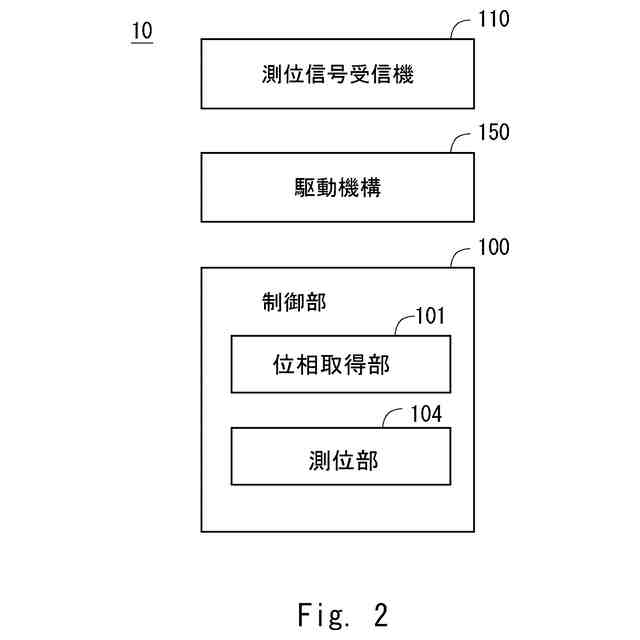
前記移動体は、前記基準局から測位信号を受信する測位信号受信機と、
受信した前記測位信号に基づき、前記移動体の移動を制御する制御部と、を備え、
前記制御部は、
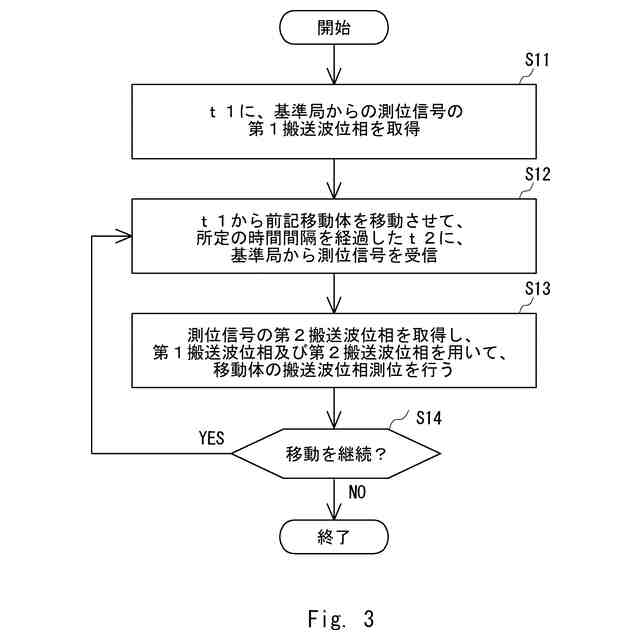
第1時刻に、前記基準局からの測位信号の第1搬送波位相を取得する位相取得手段と、
前記第1時刻から前記移動体を移動させて、時間間隔を経過した第2時刻において、前記基準局から測位信号を受信して、前記測位信号の第2搬送波位相を取得し、前記第1搬送波位相及び前記第2搬送波位相を用いて、前記移動体の搬送波位相測位を行う測位手段と、を備える測位システム。
続きを表示(約 2,000 文字)
【請求項2】
前記第1時刻と前記第2時刻との前記時間間隔は、
前記移動体の最大移動速度から算出された、前記移動体の移動量が前記基準局からの搬送波の一波長未満となる時間に定められている、請求項1に記載の測位システム。
【請求項3】
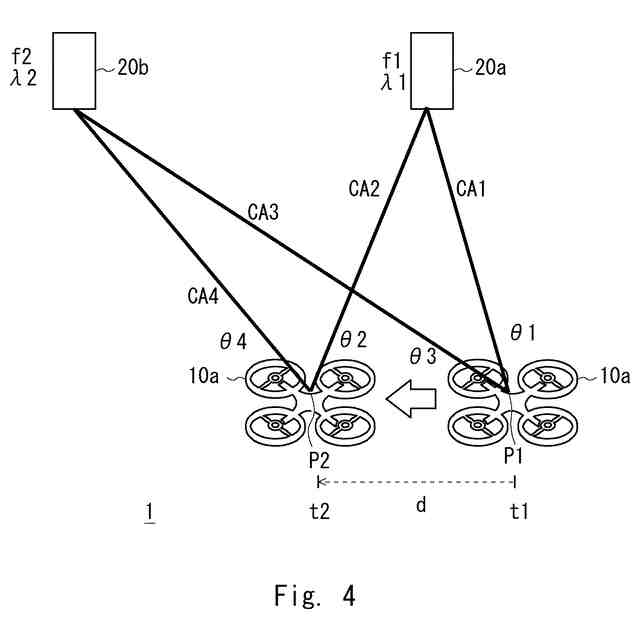
周波数の異なる複数の前記基準局を備え、
前記第1時刻と前記第2時刻との前記時間間隔は、
前記移動体の最大移動速度から算出された、前記移動体の移動量が前記複数の基準局からの搬送波のうち、最小となる搬送波の一波長未満となる時間に定められている、請求項1に記載の測位システム。
【請求項4】
前記位相取得手段は、第1時刻から、前記基準局からの第1搬送波位相を取得するとともに、搬送波位相を継続的に取得し、
前記測位手段は、前記第1時刻から継続的に取得される搬送波位相の変化量が、1周期を超える前に、前記基準局から測位信号を受信して、前記測位信号の第2搬送波位相を取得し、前記第1搬送波位相及び前記第2搬送波位相を用いて、前記移動体の搬送波位相測位を行う、請求項1に記載の測位システム。
【請求項5】
前記移動体は、加速度センサを更に備え、
前記制御部は、
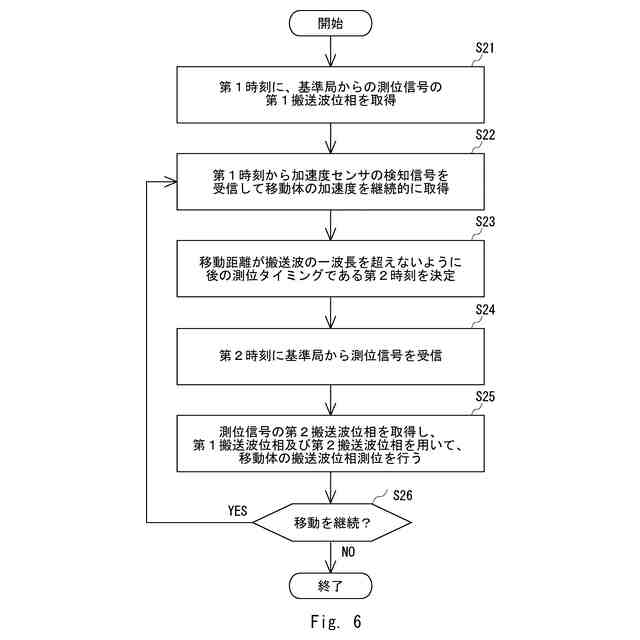
第1時刻に、前記基準局からの測位信号の第1搬送波位相を取得する位相取得手段と、
前記第1時刻から前記移動体の加速度を継続的に取得する加速度取得手段と、
取得した前記移動体の加速度と、前記第1時刻からの経過時間とから算出された前記移動体の移動距離が前記基準局からの搬送波の一波長を超えないように、前記第1時刻の後の測位タイミングである第2時刻を決定する決定手段と、
決定された前記第2時刻に、前記基準局から測位信号を受信して、前記測位信号の第2搬送波位相を取得し、前記第1搬送波位相及び前記第2搬送波位相を用いて、前記移動体の搬送波位相測位を行う測位手段と、を備える請求項1に記載の測位システム。
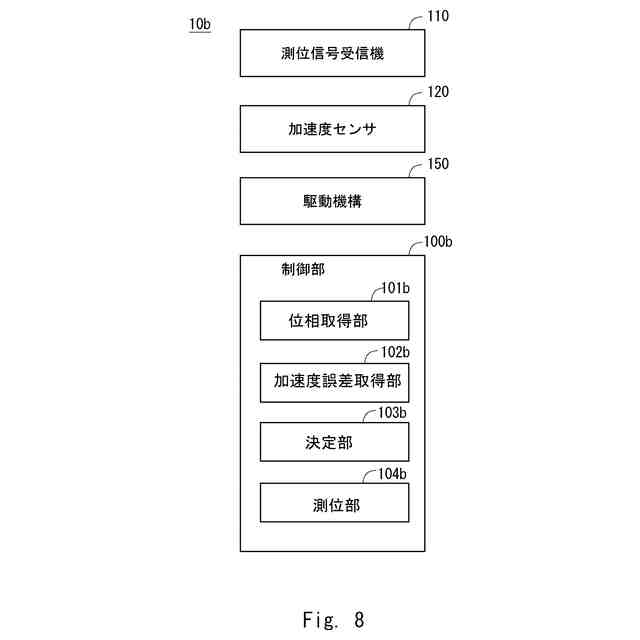
【請求項6】
前記移動体は、加速度センサを更に備え、
前記制御部は、
第1時刻に、前記基準局からの測位信号の第1搬送波位相を取得する位相取得手段と、
前記移動体の前記加速度センサの加速度の誤差を取得する加速度誤差取得手段と、
前記第1時刻からの経過時間にわたる、取得した前記移動体の加速度誤差の合計の範囲が前記基準局からの搬送波のプラスマイナス半波長を超えないように、前記第1時刻の後の測位タイミングである第2時刻を決定する決定手段と、
決定された前記第2時刻に、前記基準局から前記測位信号を受信して、前記測位信号の第2搬送波位相を取得し、前記第1搬送波位相及び前記第2搬送波位相を用いて、前記移動体の搬送波位相測位を行う測位手段と、を備える請求項1に記載の測位システム。
【請求項7】
周波数の異なる複数の前記基準局を備え、
前記制御部の前記決定手段は、
算出された前記移動体の移動距離が、前記複数の基準局の各搬送波の波長のうち、最小となる一波長を超えないように、前記第1時刻の後の測位タイミングである第2時刻を決定する、請求項5又は6に記載の測位システム。
【請求項8】
地上に固定された基準局から受信した測位信号に基づき、移動体の移動を制御する移動制御装置であって、
第1時刻に、前記基準局からの測位信号の第1搬送波位相を取得する位相取得手段と、
前記第1時刻から前記移動体を移動させて、時間間隔を経過した第2時刻において、前記基準局から測位信号を受信して、前記測位信号の第2搬送波位相を取得し、前記第1搬送波位相及び前記第2搬送波位相を用いて、前記移動体の搬送波位相測位を行う測位手段と、を備える移動制御装置。
【請求項9】
地上に固定された基準局から受信した測位信号に基づき、移動体の移動を制御する移動制御方法であって、
第1時刻に、前記基準局からの測位信号の第1搬送波位相を取得し、
前記第1時刻から前記移動体を移動させて、時間間隔を経過した第2時刻において、前記基準局から測位信号を受信して、前記測位信号の第2搬送波位相を取得し、前記第1搬送波位相及び前記第2搬送波位相を用いて、前記移動体の搬送波位相測位を行う、移動制御方法。
【請求項10】
地上に固定された基準局から受信した測位信号に基づき、移動体の移動を制御するプログラムであって、
第1時刻に、前記基準局からの測位信号の第1搬送波位相を取得し、
前記第1時刻から前記移動体を移動させて、時間間隔を経過した第2時刻において、前記基準局から測位信号を受信して、前記測位信号の第2搬送波位相を取得し、前記第1搬送波位相及び前記第2搬送波位相を用いて、前記移動体の搬送波位相測位を行うことを、コンピュータに実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、測位システム、移動制御装置、移動制御方法、及びプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
一般的なドローンは、屋外において衛星測位システムを利用して自律飛行する。しかし、屋内など衛星電波の受信が困難な場所におけるドローンの自律飛行には測位が困難である。
【0003】
ところで、無線を用いて位置測位を行う場合において、高精度な位置測位を行うためには、搬送波位相測位が用いられている。搬送波位相測位を行うためには、受信局において位相を計測する必要がある。しかし、その位相については、送信局のクロックと受信局のクロックの時刻ずれによって、位相の誤差が生じる。その誤差について、GPSにおいては、GPS衛星が常時移動していることを利用して、ごく短時間での複数の観測値を使用することで相殺できることが分かっている。
【先行技術文献】
【特許文献】
【0004】
特開2004-286494号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
この方式を、例えば、屋内での位置測位に適用する場合、屋内に配置された送信基準局が固定されているため、送信基準局の移動による位相の誤差の相殺を行うことができない。そのため、この誤差の相殺方法を屋内位置測位にそのまま適用することはできない。
【0006】
本開示は、このような問題点を解決するためになされたものであり、地上に配置された基準局からの測位信号を用いて、高精度な搬送波位相測位を可能にする測位システム等を提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示の一態様にかかる測位システムは、
地上に固定された基準局と、移動体と、を備え、
前記移動体は、前記基準局から測位信号を受信する測位信号受信機と、
受信した前記測位信号に基づき、前記移動体の移動を制御する制御部と、を備え、
前記制御部は、
第1時刻に、前記基準局からの測位信号の第1搬送波位相を取得する位相取得手段と、
前記第1時刻から前記移動体を移動させて、時間間隔を経過した第2時刻において、前記基準局から測位信号を受信して、前記測位信号の第2搬送波位相を取得し、前記第1搬送波位相及び前記第2搬送波位相を用いて、前記移動体の搬送波位相測位を行う測位手段と、を備える。
【0008】
本開示の一態様にかかる移動制御装置は、
地上に固定された基準局から受信した測位信号に基づき、移動体の移動を制御する移動制御装置であって、
第1時刻に、前記基準局からの測位信号の第1搬送波位相を取得する位相取得手段と、
前記第1時刻から前記移動体を移動させて、時間間隔を経過した第2時刻において、前記基準局から測位信号を受信して、前記測位信号の第2搬送波位相を取得し、前記第1搬送波位相及び前記第2搬送波位相を用いて、前記移動体の搬送波位相測位を行う測位手段と、を備える。
【0009】
本開示の一態様にかかる移動制御方法は、
地上に固定された基準局から受信した測位信号に基づき、移動体の移動を制御する移動制御方法であって、
第1時刻に、前記基準局からの測位信号の第1搬送波位相を取得し、
前記第1時刻から前記移動体を移動させて、時間間隔を経過した第2時刻において、前記基準局から測位信号を受信して、前記測位信号の第2搬送波位相を取得し、前記第1搬送波位相及び前記第2搬送波位相を用いて、前記移動体の搬送波位相測位を行う。
【0010】
本開示の一態様にかかるプログラムは、
地上に固定された基準局から受信した測位信号に基づき、移動体の移動を制御するプログラムであって、
第1時刻に、前記基準局からの測位信号の第1搬送波位相を取得し、
前記第1時刻から前記移動体を移動させて、時間間隔を経過した第2時刻において、前記基準局から測位信号を受信して、前記測位信号の第2搬送波位相を取得し、前記第1搬送波位相及び前記第2搬送波位相を用いて、前記移動体の搬送波位相測位を行うことを、コンピュータに実行させる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本電気株式会社
光中継器、及び光通信システム
2日前
日本電気株式会社
光信号中継装置及び光信号中継方法
今日
日本電気株式会社
超伝導デバイスおよびその製造方法
8日前
日本電気株式会社
監視装置、監視方法、及びプログラム
4日前
日本電気株式会社
管理装置、通信端末、通信方法及びプログラム
3日前
日本電気株式会社
行動支援装置、行動支援方法、及び、記録媒体
10日前
日本電気株式会社
画像処理装置、画像処理方法、及びプログラム
9日前
日本電気株式会社
保守支援装置、保守支援方法、およびプログラム
8日前
日本電気株式会社
衛星システム、監視衛星、監視方法、プログラム
9日前
日本電気株式会社
サーバ装置、サーバ装置の制御方法及びプログラム
4日前
日本電気株式会社
文書作成支援装置、文書作成支援方法、プログラム
4日前
日本電気株式会社
アクセス管理装置、アクセス管理方法及びプログラム
3日前
日本電気株式会社
電力変換器、処理システム、処理方法、およびプログラム
9日前
日本電気株式会社
電力制御器、処理システム、処理方法、およびプログラム
10日前
日本電気株式会社
情報提供装置、情報提供方法およびコンピュータプログラム
2日前
日本電気株式会社
3次元データ生成装置、3次元データ生成方法及びプログラム
1日前
日本電気株式会社
来歴管理システム、来歴管理方法、プログラム、及び記憶装置
4日前
日本電気株式会社
給電制御装置、給電システム、給電制御方法、及びプログラム
9日前
日本電気株式会社
システム自動設計装置、システム自動設計方法及びプログラム
11日前
日本電気株式会社
測位システム、移動制御装置、移動制御方法、及びプログラム
3日前
日本電気株式会社
情報処理装置、情報処理方法、プログラム、および分析システム
9日前
日本電気株式会社
光分岐結合装置、光海底ケーブルシステム、及び光分岐結合方法
10日前
日本電気株式会社
情報処理装置、監視システム、データ生成方法、及びプログラム
4日前
日本電気株式会社
姿勢評価装置、姿勢評価システム、姿勢評価方法、及びプログラム
8日前
日本電気株式会社
ユーザデータ処理装置、ユーザデータ処理方法、及び通信システム
11日前
日本電気株式会社
パラメータ値決定システム、パラメータ値決定方法およびプログラム
10日前
日本電気株式会社
異常検出システム、異常検出装置、異常検出方法、及び、プログラム
9日前
日本電気株式会社
前方監視システム、前方監視装置、前方監視方法、及び、プログラム
9日前
日本電気株式会社
カウンセリング支援システム、カウンセリング支援方法およびプログラム
11日前
日本電気株式会社
防災無線送受信システム、防災無線送受信方法及び防災無線送受信プログラム
2日前
日本電気株式会社
マスターバッチ、マスターバッチの製造方法、および、発泡樹脂組成物の成形方法
8日前
日本電気株式会社
端末、端末の制御方法及びプログラム
8日前
日本電気株式会社
売価管理装置、制御方法及びプログラム
7日前
日本電気株式会社
情報処理システム、方法、およびプログラム
7日前
日本電気株式会社
通信端末、コアネットワークノード、及び方法
8日前
日本電気株式会社
画像処理装置、画像処理方法、及びプログラム
7日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ