TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025062640
公報種別
公開特許公報(A)
公開日
2025-04-15
出願番号
2023171797
出願日
2023-10-03
発明の名称
PWM制御装置
出願人
オークマ株式会社
代理人
弁理士法人YKI国際特許事務所
主分類
H03K
7/08 20060101AFI20250408BHJP(基本電子回路)
要約
【課題】PWM信号のデューティ比決定用の比較値と比較されるカウント値(キャリア)の上限値を、キャリア周期に依存することなく一定にして、比較値の生成回路を簡略化する。
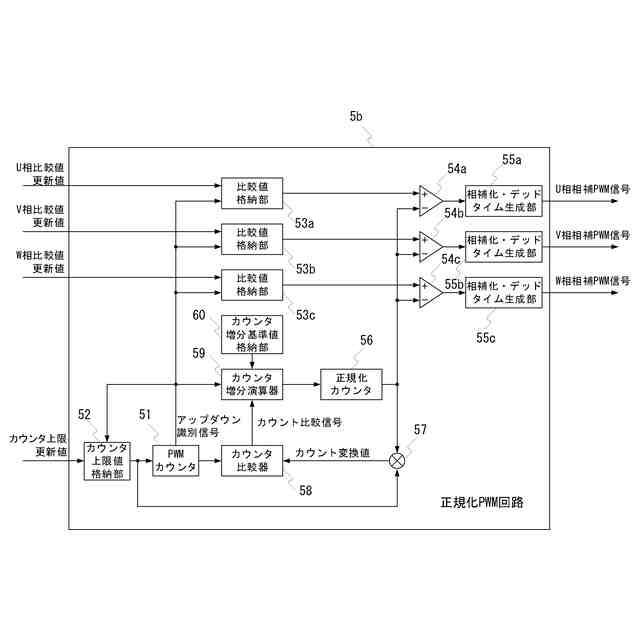
【解決手段】PWM制御装置は、正規化カウンタを備える。正規化カウンタは、0と2^Nの間で、クロック信号の入力毎に平均で2^N/Cmaxずつカウントアップまたはカウントダウンを行う。ここで、Nは自然数であり、Cmaxはキャリア周期に応じて変化する値である。PWM制御装置は、正規化カウンタの正規化カウント値をPWM信号のデューティ比決定用の比較値と比較して、その比較結果をPWM信号として出力するコンパレータをさらに備える。
【選択図】図8
特許請求の範囲
【請求項1】
PWM制御装置であって、
0と2^Nの間で、クロック信号の入力毎に平均で2^N/Cmaxずつカウントアップまたはカウントダウンを行う正規化カウンタを備え、
前記Nは自然数であり、
前記Cmaxは、キャリア周期に応じて変化する値であり、
前記PWM制御装置は、前記正規化カウンタの正規化カウント値をPWM信号のデューティ比決定用の比較値と比較して、その比較結果をPWM信号として出力するコンパレータをさらに備える、
ことを特徴とするPWM制御装置。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載のPWM制御装置であって、
0と前記Cmaxの間で、前記クロック信号の入力毎に1ずつカウントアップまたはカウントダウンを行うPWMカウンタと、
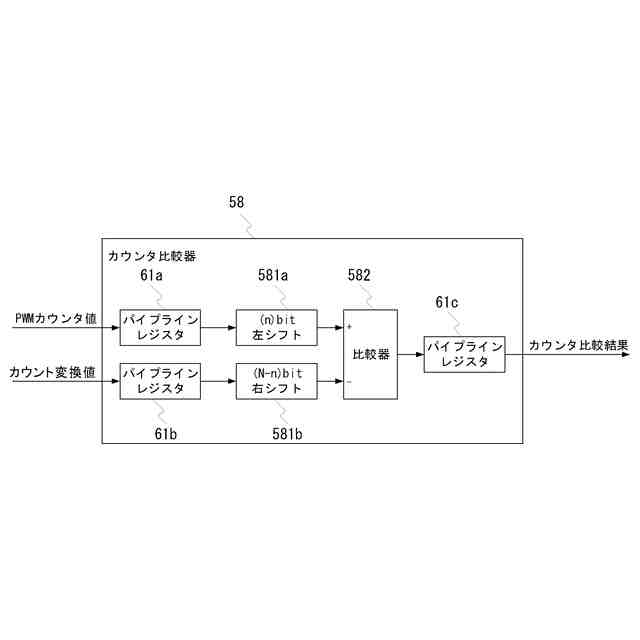
前記正規化カウント値と前記Cmaxの積であるカウント変換値と、前記PWMカウンタのPWMカウント値とを桁合わせして比較し、カウンタ比較結果として出力するカウンタ比較手段と、
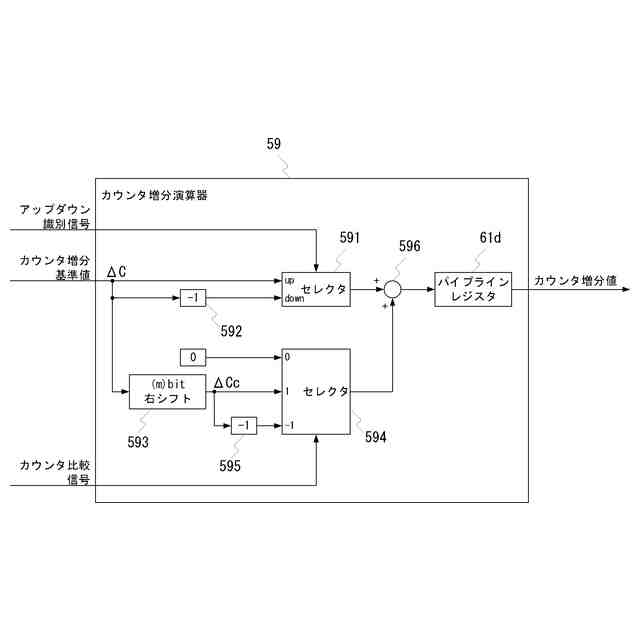
カウンタ増分演算手段と、をさらに備え、
前記2^N/Cmaxは、カウンタ増分基準値ΔCとして規定され、
前記カウンタ増分演算手段は、
暫定カウンタ増分値として、前記PWMカウンタがアップカウントする場合にΔCを、前記PWMカウンタがダウンカウントする場合に-ΔCを取得し、
カウンタ補正基準値ΔCcとして、ΔCをmビットだけ右シフトした値を取得し、
カウンタ補正値として、前記カウンタ比較結果において前記PWMカウンタ値が前記カウント変換値より大きい場合にΔCcを、小さい場合に-ΔCcを、それらが等しい場合に0を取得し、
カウンタ増分値として、前記暫定カウンタ増分値に前記カウンタ補正値を加算した値を取得し、
前記正規化カウンタは、
前記クロック信号が入力されるタイミングで、現在の正規化カウント値に前記カウント増分値を加算して、正規化カウント値を更新する、
ことを特徴とするPWM制御装置。
【請求項3】
請求項2に記載のPWM制御装置であって、
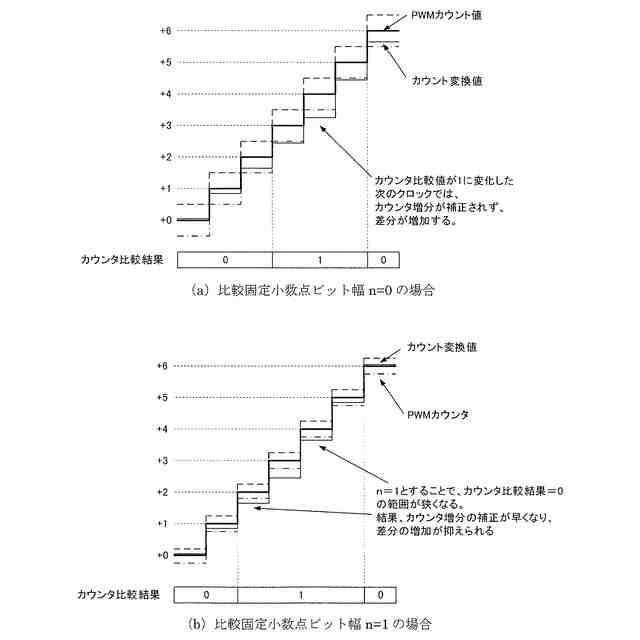
前記カウンタ比較手段は、前記カウント変換値が有する固定小数点N桁のうち小数点第n位までを有効桁数として、前記PWMカウンタのPWMカウント値と桁合わせして比較を行い、
前記nは、前記正規化カウント値が前記カウンタ比較手段と前記カウンタ増分演算手段を介して、前記正規化カウント値の更新に反映されるまでの遅延クロック数Cdに対して、2^n≧Cdの関係を満たす、
ことを特徴とするPWM制御装置。
【請求項4】
請求項3に記載のPWM制御装置であって、
前記カウンタ補正基準値ΔCcのシフト量である前記mが、前記カウンタ比較手段の桁合わせにおける前記nと、前記遅延クロック数Cdに対して、2^m0≧Cd×2^n、を満たす最小の整数m0に対し、m0-1≦m≦m0+1の関係を満たす、
ことを特徴とするPWM制御装置。
【請求項5】
請求項4に記載のPWM制御装置であって、
前記ΔC及び前記mに関し、ΔC/2^mが0とならないように、前記正規化カウンタの内部カウント値と、前記カウンタ増分演算手段の前記カウンタ増分基準値に、前記mビット以下の固定小数点ビットを付加する、
ことを特徴とするPWM制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータをインバータ制御等するためのパルス幅変調(PWM)信号を生成するPWM制御装置に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
3相モータにより負荷の速度や回転角(位置)を制御するモータ制御装置では、電力変換器として、通常、3相電圧型インバータをPWM信号により駆動するPWMインバータが採用され、制御用プロセッサとして、周辺機器としてPWM回路を内蔵したマイクロコントローラなどが使用される。
【0003】
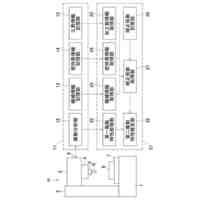
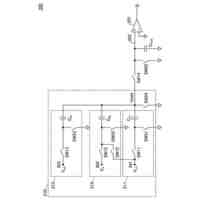
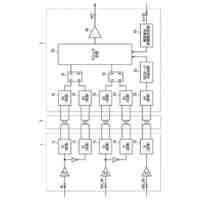
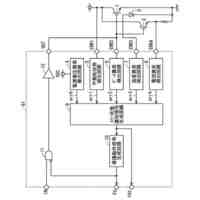
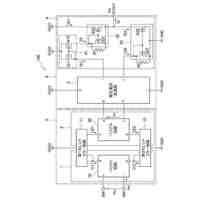
図9は、いわゆる三角波PWM信号を出力する場合の、従来のPWM回路5aの構成を示すブロック図である。
【0004】
このPWM回路5aは、PWMカウンタ51と、カウンタ上限値格納部52と、比較値格納部53a,53b,53cと、コンパレータ54a,54b,54cと、相補化・デッドタイム生成部55a,55b,55cを備えている。PWMカウンタ51は、図示しないクロック信号をアップダウンカウントする。カウンタ上限値格納部52は、PWMのキャリア周期決定用のカウント上限値を格納する。比較値格納部53a,53b,53cは、U相、V相、W相のPWM信号のデューティ比を決めるための比較値を格納する。コンパレータ54a,54b,54cは、PWMカウンタ51の値と比較値格納部53a,53b,53cの値とをそれぞれ比較して、PWMカウンタ51の値が比較値格納部53a,53b,53cの値を下回るときにアクティブのPWM信号を生成する。相補化・デッドタイム生成部55a,55b,55cは、コンパレータ54a,54b,54cの生成したPWM信号からデッドタイムを考慮して相補関係にある正相PWM信号、逆相PWM信号を出力する。相補化・デッドタイム生成部55a,55b,55cとしては、例えば、特許文献1に開示された構成など様々な実現手段が知られている。
【0005】
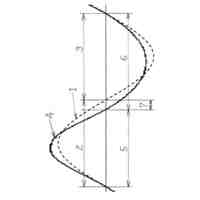
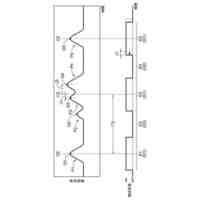
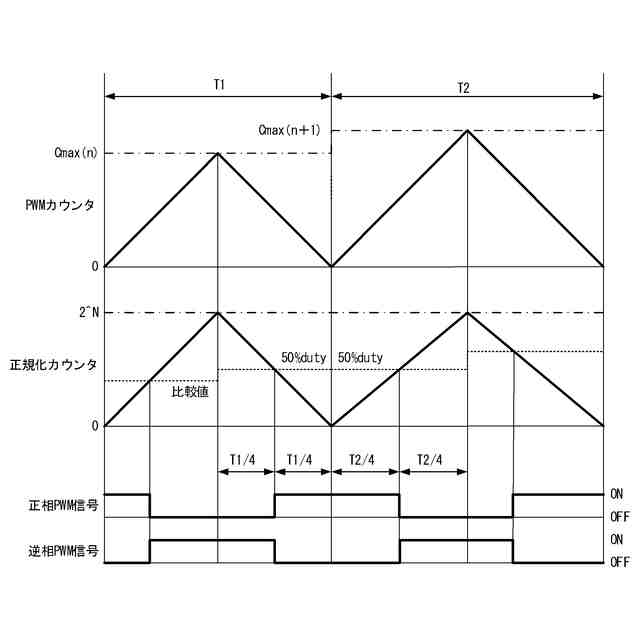
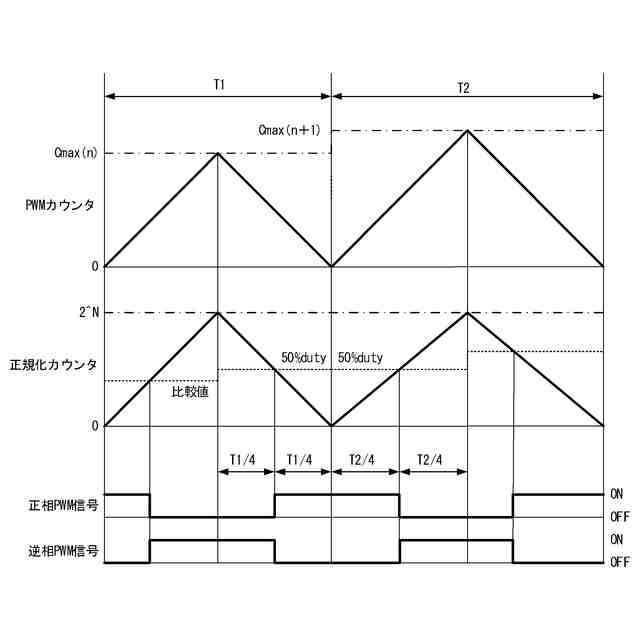
図12は、図9に示す構成のPWM回路5aのU相のPWM出力を示すタイミングチャートである。なお、図12では、簡単のため、デッドタイムが0の場合の例を示している。
【0006】
PWMカウンタ51は図示しないクロック信号をカウントする。PWMカウンタ51に対しては、カウンタ上限値格納部52からカウンタ上限値が入力されている。PWMカウンタ51は、0とカウンタ上限値との間をアップダウンカウントするPWMカウント値と、現在のカウント方向を示すアップダウン識別信号を出力する。PWMカウント値は、コンパレータ54aの反転入力端子に入力される。コンパレータ54aの非反転入力端子には比較値格納部53aから比較値が入力される。コンパレータ54aは、PWMカウント値を比較値と比較し、PWMカウント値が比較値以下の時はONを出力し、PWMカウント値が比較値を超えた時にOFFを出力し、またPWMカウント値が比較値を下回ったときにONを出力する。コンパレータ54aが出力するPWM信号は相補化・デッドタイム生成部55aに入力される。相補化・デッドタイム生成部55aは、コンパレータ54aが出力するPWM信号を正相PWM信号として出力するとともに、反転した信号を逆相PWM信号として出力する。なお、実際には、インバータ部のスイッチング時間による同時ONを防止するために正相ONと逆相ONの間に、両方がOFFするデッドタイムが挿入されるが、図12ではそれが省略されている。カウンタ上限値格納部52には、PWMカウンタ51から入力されるアップダウン識別信号に基づき、ダウンカウントからアップカウントに変化するタイミングで、PWM回路外部から入力されるカウンタ上限更新値を、カウンタ上限値として格納し出力する。比較値格納部53aには、PWMカウンタ51から入力されるアップダウン識別信号に基づき、カウント方向が変化するタイミングで、PWM回路外部から入力されるU相比較値更新値を、U相比較値として格納し出力する。V相、W相についても、U相と同じであり、V,W相の比較値格納部53b,53c、コンパレータ54b,54c、相補化・デッドタイム生成部55b,55cのそれぞれが、U相の比較値格納部53a、コンパレータ54a、相補化・デッドタイム生成部55aと同様の機能を有している。
【0007】
PWM信号のキャリア周期は、PWM回路に入力されるクロック信号の周期とカウンタ上限値格納部52に格納されるカウンタ上限値により、以下の式(1)で表すことができる。
【0008】
キャリア周期=クロック周期×カウンタ上限値×2 ・・・(1)
【0009】
また、デューティ比が50%となる比較値は、カウンタ上限値の1/2である。そのため、同じデューティ比であっても、キャリア周期とクロック周期から決定されるカウンタ上限値により比較値が異なる。図12には、1回目キャリア周期(T1)に比べて、2回目キャリア周期(T2)を大きくしたケースが示されている。この場合、T1のカウンタ上限値に比べて、T2のカウンタ上限値が大きくなる。図12には、1回目キャリア周期(T1)の後半(ダウンカウント区間)と2回目キャリア周期(T2)の前半(アップカウント区間)において50%デューティの比較値の違いが示されている。
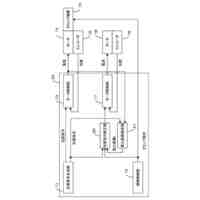
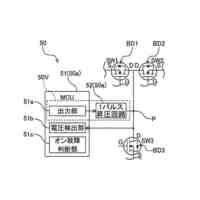
【0010】
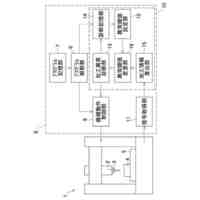
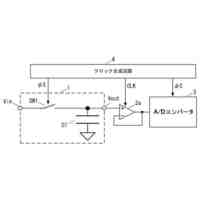
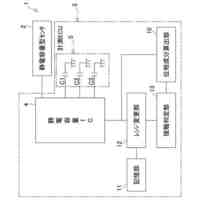
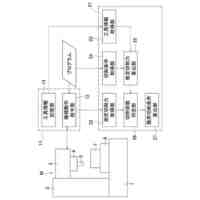
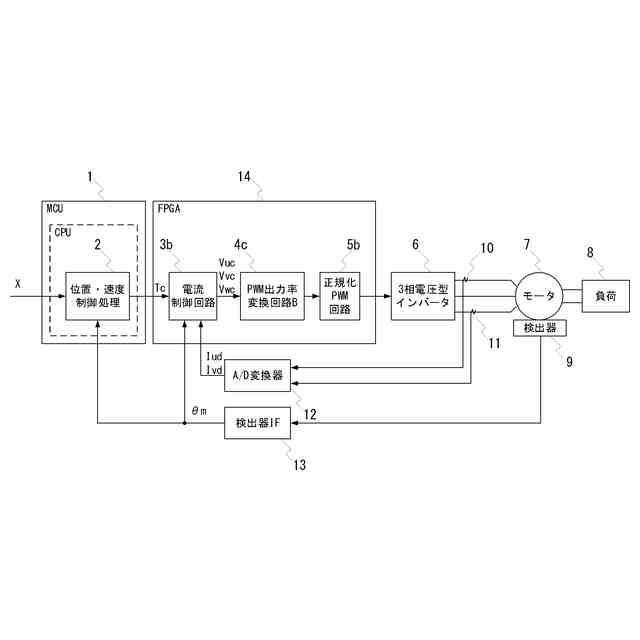
図10は、図9及び図12を用いて説明した従来のPWM回路5aを内蔵するマイクロコントローラ1を用いたモータシステムの構成を示すブロック図である。マイクロコントローラ1は、モータ制御装置として機能する。以下、図10のモータシステムについて説明する。上位制御装置(図示しない)より、マイクロコントローラ1に対して、指令値Xが出力される。指令値Xは負荷の速度や回転角である。モータシステムは、モータ7の回転角を検出する検出器9を備える。このモータ7の回転角は、モータ7に接続されて駆動される負荷8の位置検出値であり、検出器インターフェース13を介して、位置検出値θmとして出力される。また、モータシステムは、マイクロコントローラ1が出力するPWM信号によって駆動される3相電圧型インバータ6を備える。3相電圧型インバータ6は、モータ7に電力を供給する。モータ7に流れる3相電流(Iu,Iv,Iw)の少なくとも2相(例えばIuとIv)の電流は、電流検出器10,11によって検出され、A/D変換器12を介して、電流検出値Iud,Ivdとして出力される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オークマ株式会社
配置特定装置
18日前
オークマ株式会社
工作機械の制御システム
4日前
オークマ株式会社
光学式リニアエンコーダ
15日前
オークマ株式会社
エンコーダ速度監視装置
22日前
オークマ株式会社
工具ホルダの位置決め機構
1か月前
オークマ株式会社
加工異常検知方法及び加工異常検知装置
22日前
オークマ株式会社
情報処理装置、プログラム、および面粗度の算出方法
18日前
オークマ株式会社
工作機械における振動特性推定システム、工作機械及び振動特性推定方法
16日前
オークマ株式会社
工作機械における切削係数同定システム、及び工作機械における切削係数同定方法
8日前
個人
電子式音響装置
5日前
株式会社大真空
音叉型圧電振動子
1か月前
アズビル株式会社
電子回路
2か月前
株式会社大真空
音叉型圧電振動片
8日前
株式会社大真空
音叉型圧電振動片
8日前
日本電波工業株式会社
ウェハ
5日前
日本電波工業株式会社
ウェハ
5日前
日本電波工業株式会社
ウェハ
5日前
株式会社大真空
音叉型圧電振動デバイス
8日前
コーデンシ株式会社
複数アンプ回路
1か月前
ミツミ電機株式会社
比較回路
2か月前
TDK株式会社
電子部品
2か月前
矢崎総業株式会社
故障検出装置
1か月前
TDK株式会社
電子部品
2か月前
株式会社コルグ
電源装置
5日前
ローム株式会社
半導体集積回路
2日前
住友理工株式会社
接触検知装置
1か月前
西部電機株式会社
入力回路及び切替方法
1か月前
ミツミ電機株式会社
弾性波フィルタ
2か月前
三菱電機株式会社
半導体素子駆動装置
10日前
三菱電機株式会社
半導体素子駆動装置
2か月前
セイコーエプソン株式会社
振動素子
1か月前
オプテックス株式会社
物体検知装置
1か月前
オプテックス株式会社
物体検知装置
1か月前
セイコーエプソン株式会社
振動素子
2か月前
三安ジャパンテクノロジー株式会社
弾性波デバイス
1か月前
ローム株式会社
リニア電源回路
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ