TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025062609
公報種別
公開特許公報(A)
公開日
2025-04-14
出願番号
2025005044,2023139135
出願日
2025-01-14,2019-08-20
発明の名称
安定化モード分割フィンセンサ
出願人
マイクロ モーション インコーポレイテッド
代理人
弁理士法人有古特許事務所
主分類
G01F
1/84 20060101AFI20250403BHJP(測定;試験)
要約
【課題】改善されたフィンセンサを提供する。
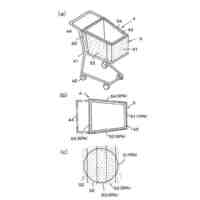
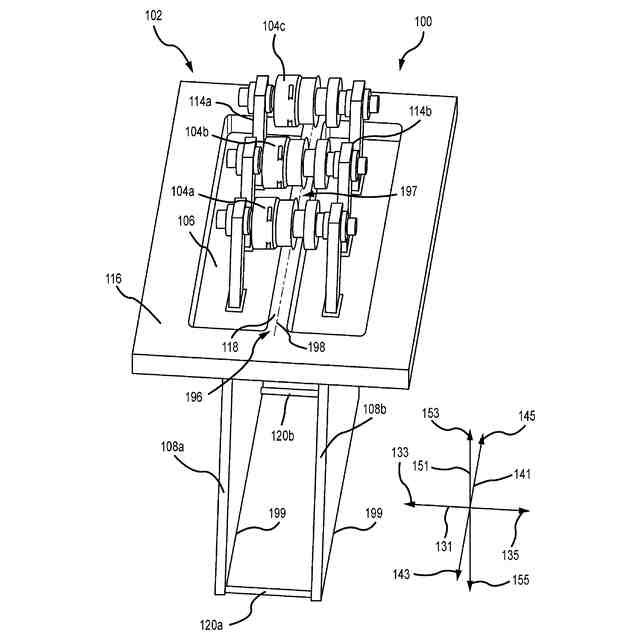
【解決手段】フィンセンサの実施形態は、第1のフィンおよび第2のフィンに結合されたベースを有し、フィンセンサは、フィンに結合された少なくとも2つのトランスデューサをさらに有し、第1のフィンは、少なくとも1つのフィン結合器によって第2のフィンに結合される。
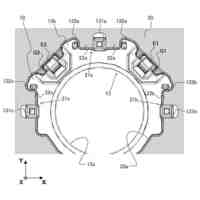
【選択図】図1
特許請求の範囲
【請求項1】
ベース(106)を有するフィンセンサ(102)であって、前記ベースが、第1のフィン(108a)および第2のフィン(108b)に結合され、前記フィンセンサ(102)が、前記フィン
(108aおよび108b)に結合された少なくとも2つのトランスデューサ(104aおよび104b)
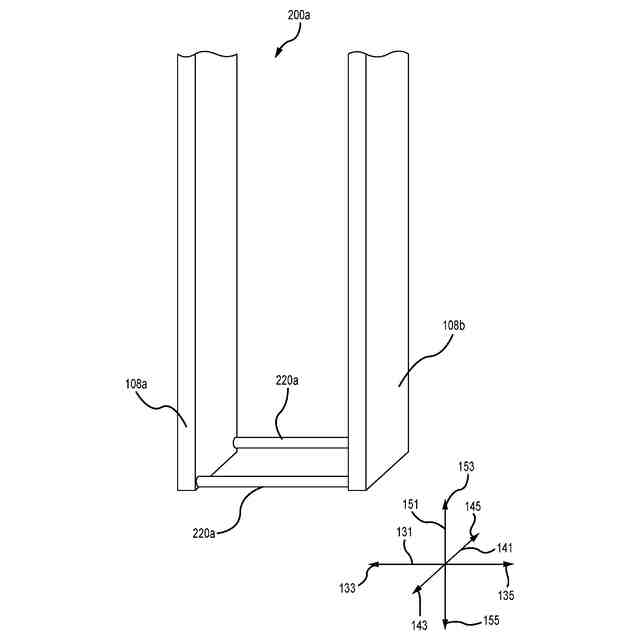
をさらに有し、前記第1のフィン(108a)が、少なくとも1つのフィン結合器(120aおよび/または120b)によって前記第2のフィン(108b)に結合される、フィンセンサ。
続きを表示(約 1,300 文字)
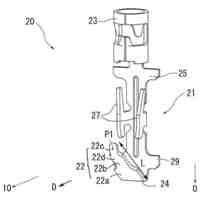
【請求項2】
前記少なくとも1つのフィン結合器(120aおよび/または120b)が、ロッド状フィン結
合器(220a)である、請求項1に記載のフィンセンサ(102)。
【請求項3】
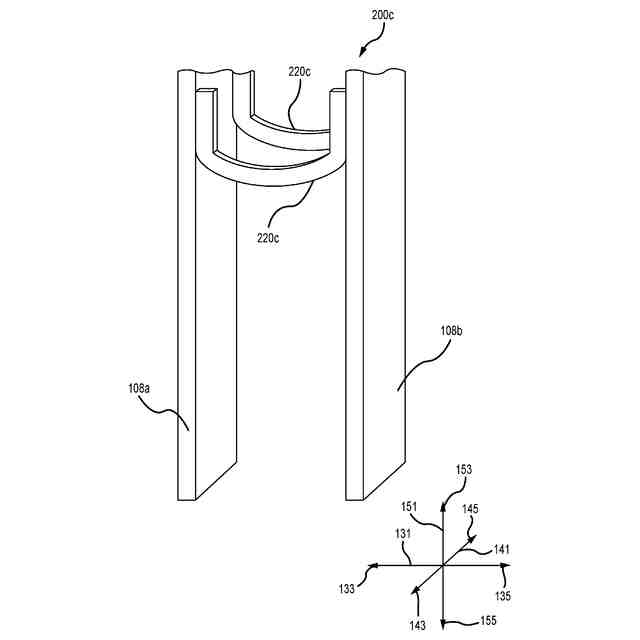
前記少なくとも1つのフィン結合器(120aおよび/または120b)が、ブレースバー(220c)である、請求項1に記載のフィンセンサ(102)。
【請求項4】
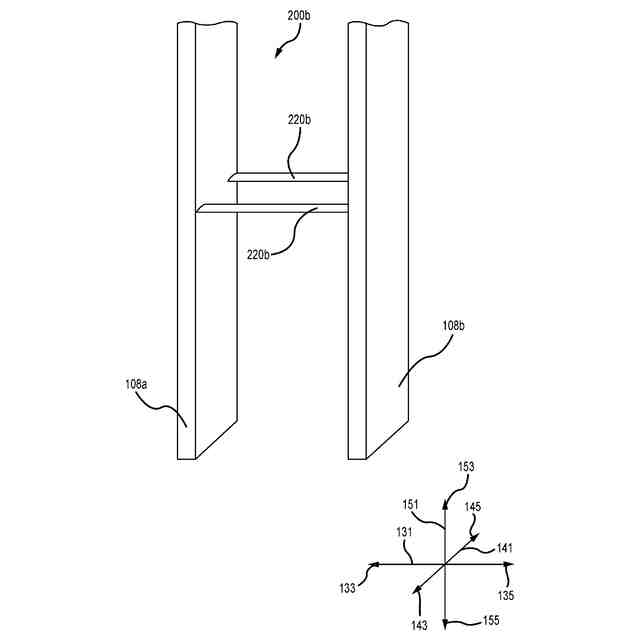
前記少なくとも1つのフィン結合器(120aおよび/または120b)が、ストリップ状フィ
ン結合器(220b)である、請求項1に記載のフィンセンサ(102)。
【請求項5】
前記ストリップ状フィン結合器(220b)が、少なくとも1つのテーパ状端部を有する、
請求項4に記載のフィンセンサ(102)。
【請求項6】
前記ストリップ状フィン結合器(220b)は、前記ストリップ状フィン結合器(220b)の上流(143)端部および下流(145)端部のうちの1つ以上が、前記ストリップ状フィン結
合器(220b)の流れ軸(141)に沿ったより中心的な位置の垂直軸(151)および交差軸(131)によって画定される平面内の断面積よりも、前記垂直軸(151)および前記交差軸(131)によって画定される平面内のより小さい断面積を有するようにテーパ状である、請
求項4および5に記載のフィンセンサ(102)。
【請求項7】
前記ストリップ状フィン結合器(220b)の前記垂直軸および前記流れ軸によって画定される平面内の断面が、前記断面の前記上流(143)端部と前記下流(145)端部との間の流れ軸(141)内の少なくとも1つの中央部分よりも、前記断面の前記上流(143)端部およ
び前記下流(145)端部のうちの1つ以上において垂直軸(151)内で狭い、請求項4および5に記載のフィンセンサ(102)。
【請求項8】
前記少なくとも1つのフィン結合器(120aおよび/または120b)が、前記フィン(108a
および108b)の対応する面上の実質的に同じ位置において前記フィン(108aおよび108b)を結合する、請求項1から7のいずれか一項に記載のフィンセンサ(102)。
【請求項9】
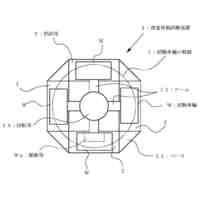
前記フィンは、前記フィン(108aおよび108b)が流れ軸(141)および垂直軸(151)によって画定される平面内の同じまたは実質的に同じ位置に配置されたときに、前記少なくとも1つのフィン結合器(120aおよび/または120b)が交差軸(131)に平行になるように同じ配置を有するように配置される、請求項1から8のいずれか一項に記載のフィンセンサ(102)。
【請求項10】
前記少なくとも1つのフィン結合器(120aおよび/または120b)が、前記フィン(108a
および108b)のそれぞれの異なる位置に結合される、請求項1から6のいずれか一項に記載のフィンセンサ(102)。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
以下に説明する実施形態は、センサに関し、より詳細には、流れセンサに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
既存のフィンセンサは、発生モード分離に問題がある。典型的には、同相であるモードと異相であるモードとの間の周波数差は最小であり、これは流体流れ特性の計算を混乱させる。また、既存のフィンセンサにカールを発生させる場合、流れ特性をもたらす位相差測定値を導出するための振幅コントラストはほとんどない。
【0003】
既存のフィンセンサでは、測定値は、それらが存在する導管の中心からセンサアセンブリに向かう著しい正味の移動によって混乱する。この理由は、フィンの回転軸が、プレート上のフィン位置およびドライバの位置によって制御されるためである。フィンの回転軸は、典型的には、フィンが存在するベースの縁部の周りにある。これは不均衡を生じ、その結果、較正に誤差および問題を生じる。同相モードからの力は、プロセス接続において正味の運動を引き起こす。また、チューブおよびバランスバーは、等しい同相モード形状に駆動することが困難または不可能な可能性がある。発生した不均衡は、較正および測定誤差につながる可能性がある。これらの問題は、フィンセンサの有効性を制限し、多くの産業用途にとって非実用的にする。
したがって、改善されたフィンセンサが必要とされている。
【発明の概要】
【0004】
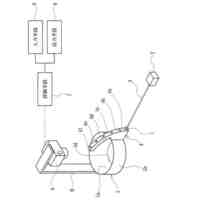
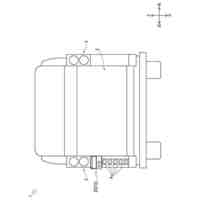
フィンセンサ(102)の実施形態が開示される。フィンセンサ(102)の実施形態は、第1のフィン(108a)および第2のフィン(108b)に結合されたベース(106)を有し、フィ
ンセンサ(102)は、フィン(108aおよび108b)に結合された少なくとも2つのトランスデューサ(104aおよび104b)をさらに有し、第1のフィン(108a)は、少なくとも1つのフィン結合器(120aおよび/または120b)によって第2のフィン(108b)に結合される。
【0005】
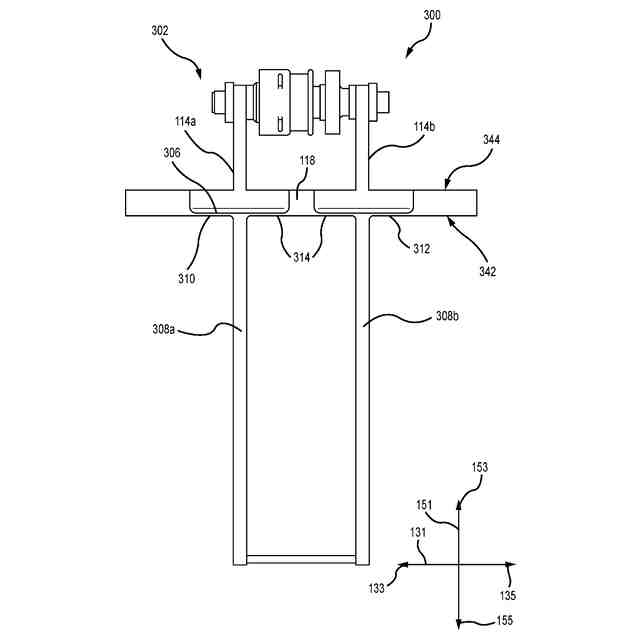
フィンセンサ(102)の別の実施形態が開示される。フィンセンサ(102)の別の実施形態は、ベース(106)およびバランスリブ(118)を有し、ベース(106)は、第1のフィン(108a)および第2のフィン(108b)に結合され、フィンセンサ(102)は、フィン(108aおよび108b)に結合された少なくとも2つのトランスデューサ(104aおよび104b)をさら
に有し、バランスリブ(118)は、ベース(106)およびベース結合器(116)のうちの1つ以上に結合される。
【0006】
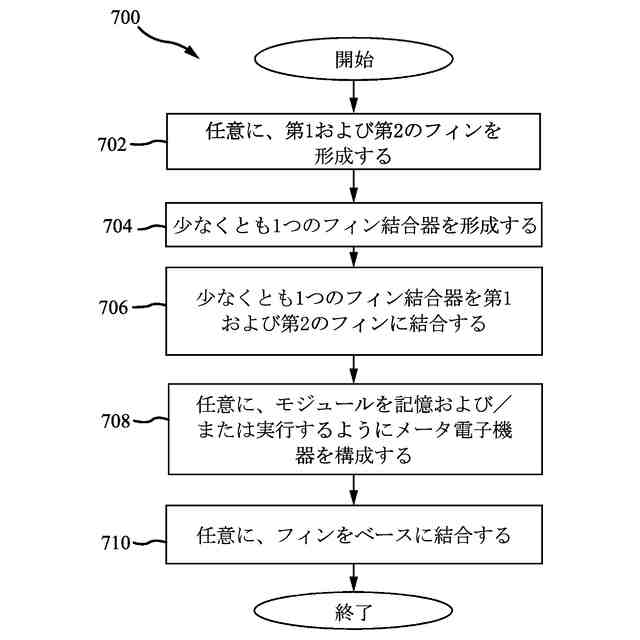
フィン結合器アセンブリを製造する方法の実施形態が開示される。本方法の実施形態は、少なくとも1つのフィン(108aおよび/または108b)および少なくとも1つのフィン結合器(120aおよび/または120b)を有するフィン結合器アセンブリを有し、本方法は、少なくとも1つのフィン(108aおよび/または108b)が少なくとも1つのフィン結合器(120aおよび/または120b)に結合されるフィン結合器アセンブリを形成するステップを含む。
【0007】
バランス型ベースアセンブリを製造する方法の実施形態が開示される。バランス型ベースアセンブリを製造する方法の実施形態は、ベース(106)を形成するステップと、バラ
ンスリブ(118)を形成するステップと、バランスリブ(118)をベース(106)およびベ
ース結合器(116)のうちの1つ以上に結合するステップとを含む。
【0008】
フィンセンサ(102)を使用する方法の実施形態が開示される。フィンセンサ(102)を使用する方法の実施形態では、フィンセンサ(102)は、第1のフィン(108a)および第2
のフィン(108b)の振動を駆動するための駆動トランスデューサ(104b)を有し、第1お
よび第2のフィン(108aおよび108b)は、ベース(106)に結合され、フィンセンサ(102
)は、応答データを受信するための少なくとも1つの検知トランスデューサ(104a)を有
し、本方法は、少なくとも1つのフィン結合器(120aおよび/または120b)によって、第2のフィン(108b)の動きに対する第1のフィン(108a)の動きを少なくとも部分的に制限
するステップを有する。
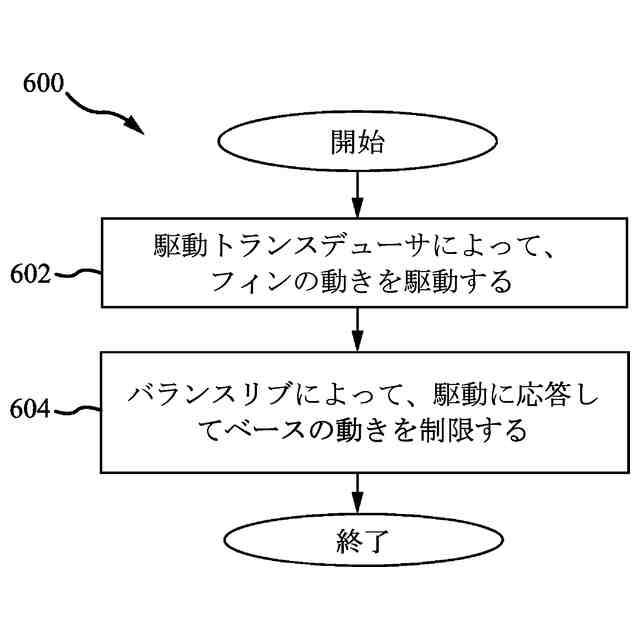
【0009】
フィンセンサ(102)を使用する方法の実施形態が開示される。フィンセンサ(102)を使用する方法の実施形態は、第1のフィン(108a)および第2のフィン(108b)の振動を駆動するための駆動トランスデューサ(104b)を有するフィンセンサ(102)を有すること
ができ、第1のフィン(108a)および第2のフィン(108b)は、ベース(106)に結合され
、フィンセンサ(102)は、応答データを受信するための少なくとも1つの検知トランスデューサ(104a)を有し、フィンセンサ(102)は、バランスリブ(118)を有し、本方法は、バランスリブ(118)によってベース(106)の動きを少なくとも部分的に制限するステップを有する。
【0010】
[態様]
一態様によれば、フィンセンサ(102)の実施形態が開示される。フィンセンサ(102)の実施形態は、第1のフィン(108a)および第2のフィン(108b)に結合されたベース(106)を有し、フィンセンサ(102)は、フィン(108aおよび108b)に結合された少なくとも2つのトランスデューサ(104aおよび104b)をさらに有し、第1のフィン(108a)は、少なくとも1つのフィン結合器(120aおよび/または120b)によって第2のフィン(108b)に結合される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
粒子分析装置
17日前
株式会社イシダ
計量装置
11日前
個人
準結晶の解析方法
3日前
日本精機株式会社
アセンブリ
3日前
個人
アクセサリー型テスター
18日前
株式会社豊田自動織機
自動走行体
2日前
エイブリック株式会社
電流検出回路
1か月前
栄進化学株式会社
浸透探傷用濃縮液
24日前
株式会社ミツトヨ
画像測定機
19日前
株式会社テイエルブイ
振動検出装置
17日前
ダイハツ工業株式会社
試料セル
17日前
トヨタ自動車株式会社
検査装置
11日前
GEE株式会社
光学特性測定装置
2日前
トヨタ自動車株式会社
電気自動車
18日前
株式会社 キョーワ
食品搬送装置
1か月前
大和製衡株式会社
計量装置
24日前
日本特殊陶業株式会社
ガスセンサ
1か月前
日本特殊陶業株式会社
ガスセンサ
1か月前
日本特殊陶業株式会社
ガスセンサ
3日前
大成建設株式会社
画像表示システム
27日前
理研計器株式会社
ガス検出器
19日前
理研計器株式会社
ガス検出器
19日前
理研計器株式会社
ガス検出器
19日前
理研計器株式会社
ガス検出器
19日前
理研計器株式会社
ガス検出器
19日前
株式会社熊谷組
計測システム
24日前
東ソー株式会社
簡易型液体クロマトグラフ
13日前
株式会社TISM
センサ部材
2日前
大和製衡株式会社
表示システム
9日前
リバークル株式会社
荷重移動試験装置
11日前
株式会社 システムスクエア
検査装置
25日前
株式会社ニコン
検出装置
17日前
株式会社小糸製作所
物体検知システム
3日前
東洋計器株式会社
超音波式流量計
24日前
株式会社デンソー
試験装置
27日前
東洋計器株式会社
超音波式流量計
24日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ