TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025062229
公報種別
公開特許公報(A)
公開日
2025-04-14
出願番号
2023171156
出願日
2023-10-02
発明の名称
伸縮電線
出願人
株式会社三機コンシス
代理人
弁理士法人河野国際特許商標事務所
,
個人
,
個人
,
個人
主分類
H01B
7/06 20060101AFI20250407BHJP(基本的電気素子)
要約
【課題】
特にロボットアームで使用する際に生ずる可能性のある、ノイズの問題、機械内部への噛み込みの問題、ロボットアーム伸縮にともなう導電線の被覆の劣化の問題を解決する伸縮電線を提供する。
【解決手段】
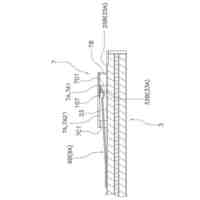
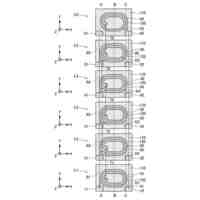
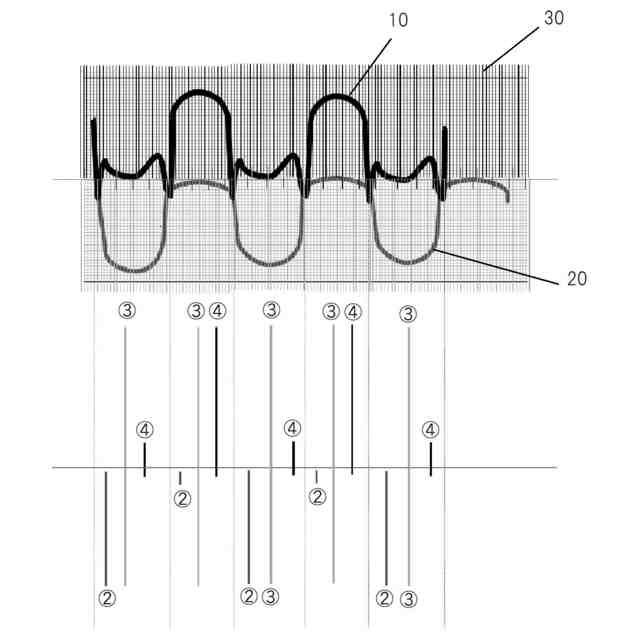
課題は、第一の導電線、第二の導電線,及び編物からなる伸縮電線であって、編物の一方の面に第一の導電線が、そして他方の面に第二の導電線が保持されており、これら第一の導電線及び第二の導電線が、所定方向に連続する波形として形成されており、第一の導電線及び第二の導電線の波形位置が所定方向において半波長分ずれて位置するよう第一の導電線及び第二の導電線が配置されていることにより解決される。
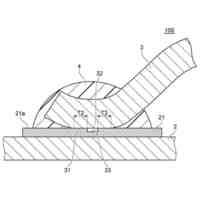
【選択図】図1
特許請求の範囲
【請求項1】
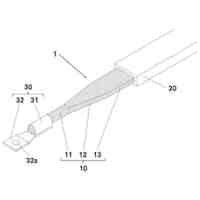
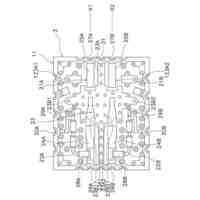
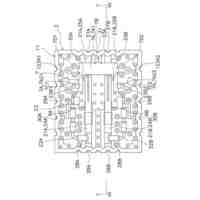
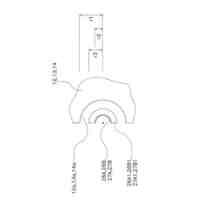
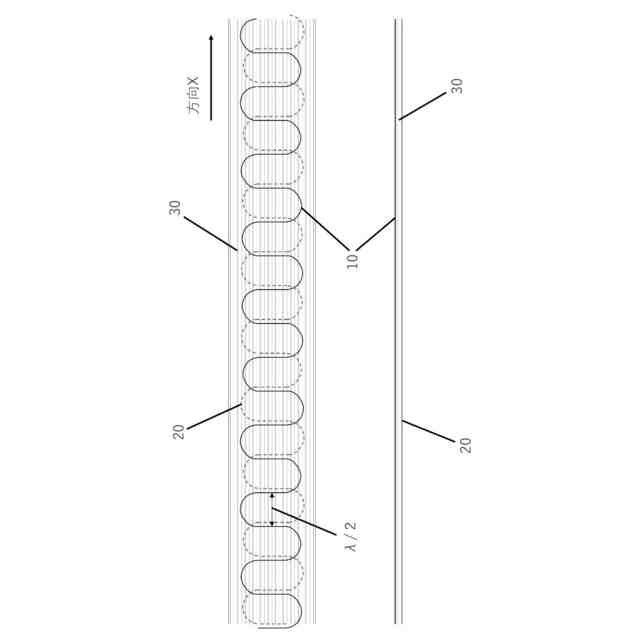
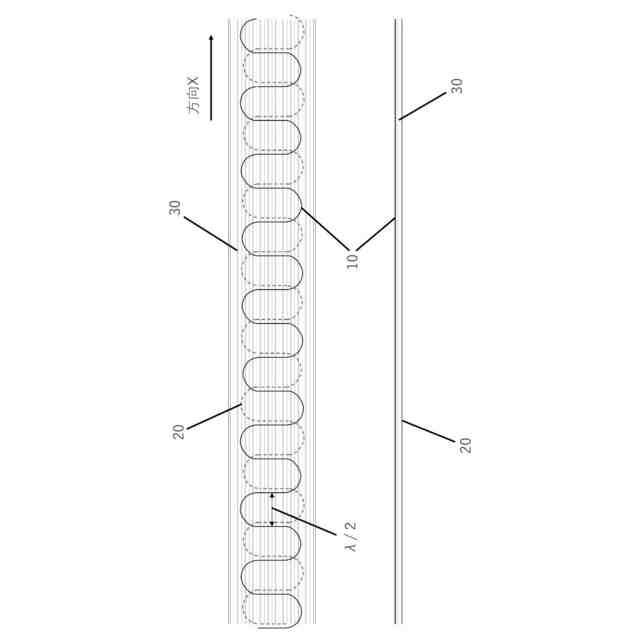
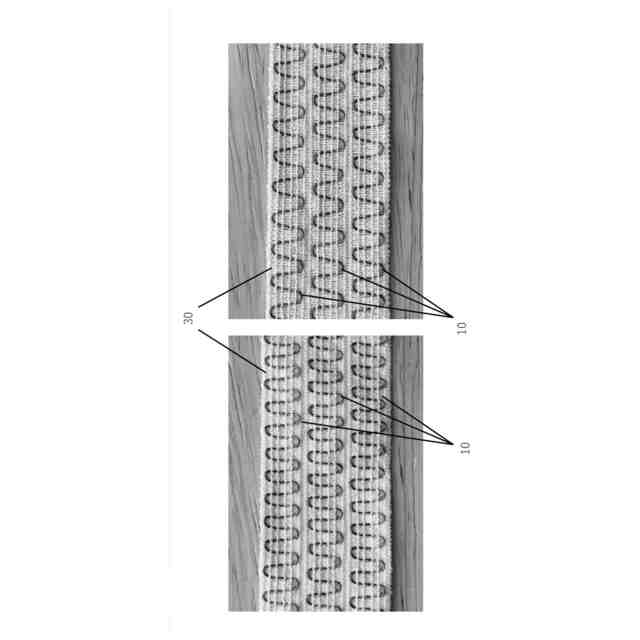
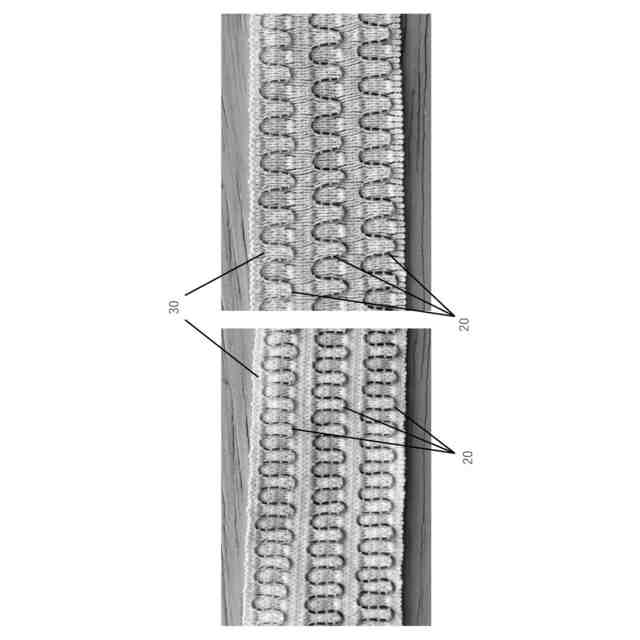
第一の導電線(10)、第二の導電線(20),及び編物(30)からなる伸縮電線であって、編物(30)の一方の面に第一の導電線(10)が、そして他方の面に第二の導電線(20)が保持されており、これら第一の導電線(10)及び第二の導電線(20)が、所定方向(X)に連続する波形として形成されており、第一の導電線(10)及び第二の導電線(20)の波形位置が所定方向(X)において半波長分ずれて位置するよう第一の導電線(10)及び第二の導電線(20)が配置されていることを特徴とする伸縮電線。
続きを表示(約 370 文字)
【請求項2】
編物(30)が伸縮性及び/又は絶縁性を有する編地として形成されていることを特徴とする請求項1に記載の伸縮電線。
【請求項3】
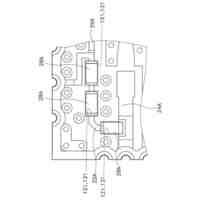
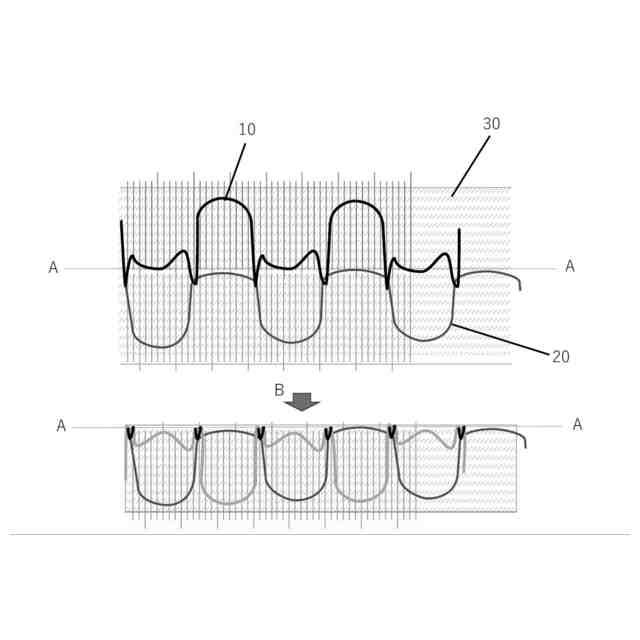
第一の導電線(10)による波形と、第二の導電線(20)による波形を、編物(30)上の仮想の直線(AA)に対して略線対称で形成されており、第一の導線(10)の波形位置と第二の導電線(20)の波形位置が、半波長分ずれて位置するよう配置されており、及び、第一の導電線(10)の波形の一部が、当該直線(AA)を越え、第二の導電線(20)のループに到達するまで伸びていることにより、当該編物(30)を前記直線(AA)により折り曲げた際に、第一の導電線(10)による波形位置と、第二の導電線(20)による波形位置が、互いに半波長分ずれて位置するよう構成されていることを特徴とする伸縮電線。
発明の詳細な説明
【技術分野】
【0001】
本発明は、第一の導電線、第二の導電線、及びこれらを保持する編物からなる伸縮電線に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
所定の方向に伸縮性を有し、かつ導電性を有するいわゆる伸縮電線とよばれる導電線が、従来からOA機器や産業機械など様々な分野の配線として用いられている。
【0003】
例えば特許文献1は、所定方向に延びる複数の導電線10と、この導電線10が編み込まれている繊維20、そして当該繊維20によって導電線10を保持する編物30からなる伸縮電線を開示している。この伸縮電線においては、複数の導電線10は、所定方向Xに対して直交する方向Yに各々振幅する波形を有しており、この波形が所定方向Xにそれぞれ連ねられることにより、所定方向Xに延びて形成されている。これによって、特許文献1の電線は、長手方向と、長手方向に直行する方向の両方向に伸縮性を有することが可能となっている。
【0004】
しかしながらこのような伸縮電線を産業機械の特定の分野、特にロボットアームにおいて使用しようとすると以下に説明するような複数の問題が生じるがわかった。
【0005】
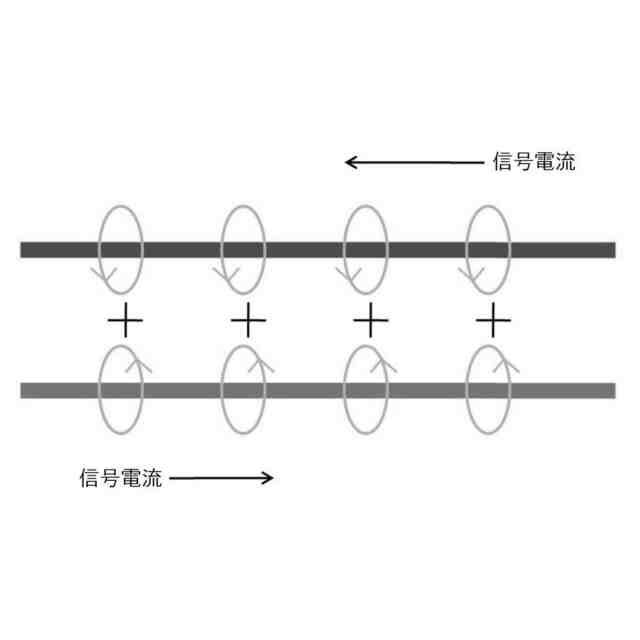
第一の問題としてノイズの影響による問題が存在する。ロボットアームは、多数の電子部品が使用されており、それら電子部品が電子制御される事により機能する。伸縮電線に信号電流を流すと磁場が発生し、電線の配置によってはそれら磁場が互いに増強しあいノイズの発生源となる可能性がある。発生するノイズによっては、ロボットアームの制御に悪影響を及ぼし、ひいてはロボットアームが誤動作する可能性がある。
【0006】
また、ロボットアームは、アームを伸張屈曲させることにより動作するが、配線をアームの外に取り付けるとアームが屈曲する際、配線が弛むと、その配置によっては弛んだ配線が、ロボットアームの構造内部へと入り込み、いわゆる噛み込みと呼ばれるトラブルを生じる可能性がある。このような噛み込み防止のために、あらかじめ伸縮電線をある程度伸ばした状態でロボットアームに配置することも考えられるが、そうするとアームを動作させるためにより多くの出力・電力が必要となり、非効率である。配線をアーム内部に配置することも考えられるが、そうすると構造が特に回転部分において複雑になってしまううえに、屈曲部分において過剰に負荷がかかり断線のリスクが生じる。
【0007】
更に、ロボットアームのアームは、相当回数伸張屈曲を繰り返すので、それにともない伸縮電線は相当回数伸縮させられることとなるが、伸縮の際に導電線、特に導電線の被覆が劣化し、ショート等のトラブルが発生する可能性も存在する。
【先行技術文献】
【特許文献】
【0008】
特開2016-092009号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明の課題は、従来技術における上述した問題点を解決する伸縮電線を提供することにある。
【課題を解決するための手段】
【0010】
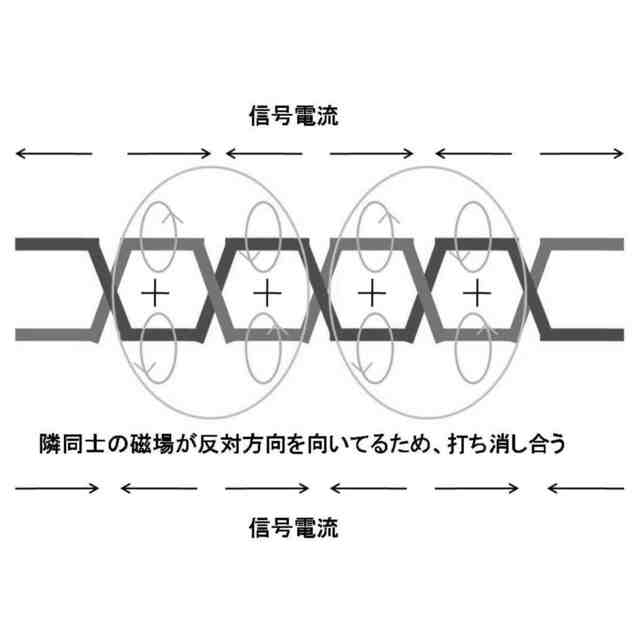
この課題は、第一の導電線、第二の導電線,及び編物からなる伸縮電線であって、編物の一方の面に第一の導電線が、そして他方の面に第二の導電線が保持されており、これら第一の導電線及び第二の導電線が、所定方向に連続する波形として形成されており、第一の導電線及び第二の導電線の波形位置が所定方向において半波長分ずれて位置するよう第一の導電線及び第二の導電線が配置されている伸縮電線により解決される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
超音波接合
今日
日星電気株式会社
平型電線
9日前
個人
汎用型電気プラグ
19日前
キヤノン株式会社
通信装置
13日前
オムロン株式会社
電磁継電器
14日前
オムロン株式会社
電磁継電器
14日前
オムロン株式会社
電磁継電器
14日前
オムロン株式会社
電磁継電器
14日前
オムロン株式会社
電磁継電器
14日前
株式会社GSユアサ
蓄電設備
8日前
太陽誘電株式会社
コイル部品
19日前
株式会社FLOSFIA
半導体装置
6日前
株式会社村田製作所
電池
7日前
株式会社村田製作所
電池
6日前
富士通株式会社
冷却モジュール
14日前
日星電気株式会社
ケーブルの接続構造
6日前
トヨタ自動車株式会社
二次電池
8日前
株式会社村田製作所
電池
6日前
株式会社村田製作所
電池
6日前
キヤノン株式会社
無線通信装置
1日前
日本電気株式会社
光学モジュール
13日前
TDK株式会社
コイル部品
13日前
オムロン株式会社
回路部品
14日前
住友電装株式会社
コネクタ
6日前
株式会社東京精密
ワーク保持装置
12日前
住友電装株式会社
コネクタ
7日前
ローム株式会社
半導体装置
7日前
オムロン株式会社
電磁継電器
14日前
富士電機株式会社
回路遮断器
14日前
オムロン株式会社
電磁継電器
14日前
富士電機株式会社
電磁接触器
19日前
三菱電機株式会社
半導体装置
14日前
KDDI株式会社
伸展マスト
8日前
オムロン株式会社
スイッチング素子
7日前
株式会社東芝
半導体装置
12日前
芝浦メカトロニクス株式会社
基板処理装置
7日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ