TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025061061
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2025002146,2023171771
出願日
2025-01-07,2013-12-18
発明の名称
システム及びプログラム
出願人
株式会社ユピテル
代理人
主分類
G08G
1/00 20060101AFI20250403BHJP(信号)
要約
【課題】複数の異なる車輪にセンサーを設置してそれぞれワイヤー接続する手間とコストがかからず、舵角センサーからのハンドル舵角を得ることができない場合であっても、車両の進行方向の変化に関する情報を求めることができる技術を提供する。
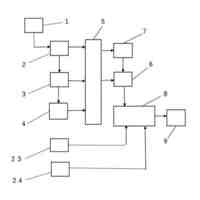
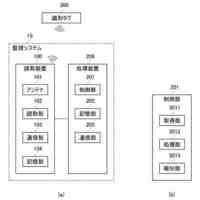
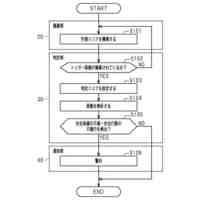
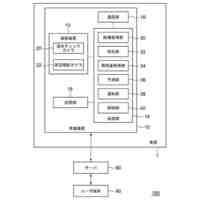
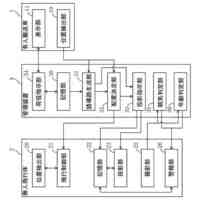
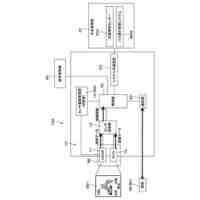
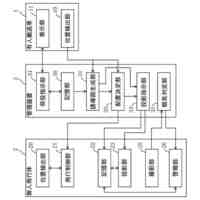
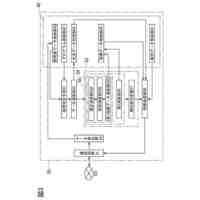
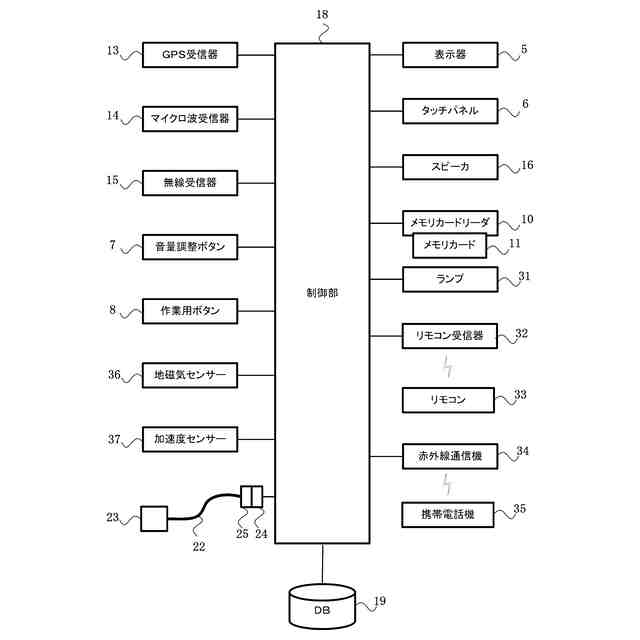
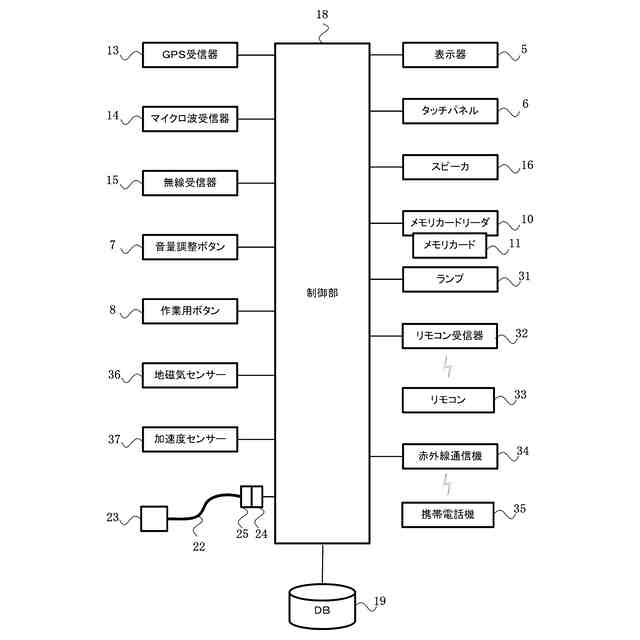
【解決手段】レーダー探知機は、車両が備える車輪の回転に関する情報を、車両についての制御を行うネットワークから取得し、取得した少なくとも2つの異なる車輪の回転に関する情報の関係に基づいて、当該車両の進行方向の変化に関する情報を求める制御部18を有する。
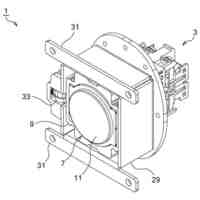
【選択図】図2
特許請求の範囲
【請求項1】
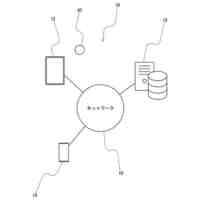
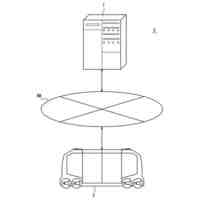
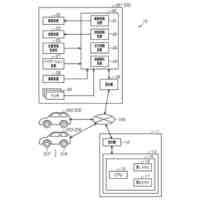
車両の走行中のデータを収集する車外のネットワークから、車輪の回転に関する情報を取得することにより、車両の外部の者が、車両についての制御を行うネットワークから取得したハンドル舵角に関する情報と、少なくとも2つの異なる車輪の回転に関する情報の関係に基づいて求めたハンドル舵角に関する情報とを比較することができるよう、車外に設置され、ネットワークに接続されたコンピュータの表示装置における表示画面に表示させる機能を備えたシステム。
続きを表示(約 560 文字)
【請求項2】
前記表示の態様は、前記車両についての制御を行うネットワークから取得したハンドル舵角に関する情報と、前記少なくとも2つの異なる車輪の回転に関する情報の関係に基づいて求めたハンドル舵角に関する情報との相違を識別できる態様とする機能を備えた請求項1に記載のシステム。
【請求項3】
前記相違を識別できる態様として、相違の存在を表示させる機能を備えた請求項2に記載のシステム。
【請求項4】
前記相違を識別できる態様として、相違の大きさを表示させる機能を備えた請求項2または3に記載のシステム。
【請求項5】
前記相違を識別できる態様として、相違から推定される異常の種類を表示させる機能を備えた請求項2から4のいずれかに記載のシステム。
【請求項6】
当該車両の進行方向の変化を認識することができるよう前記表示画面に表示させる機能を備えた請求項1から5のいずれかに記載のシステム。
【請求項7】
前記表示画面は、タクシー会社または運送会社に設置された表示画面とした請求項1から6のいずれかに記載のシステム。
【請求項8】
請求項1から7のいずれかに記載のシステムの機能をコンピュータに実現させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば車両の進行方向の変化に関する情報を求めるシステム及びプログラムに関するものである。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
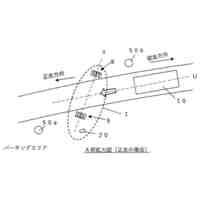
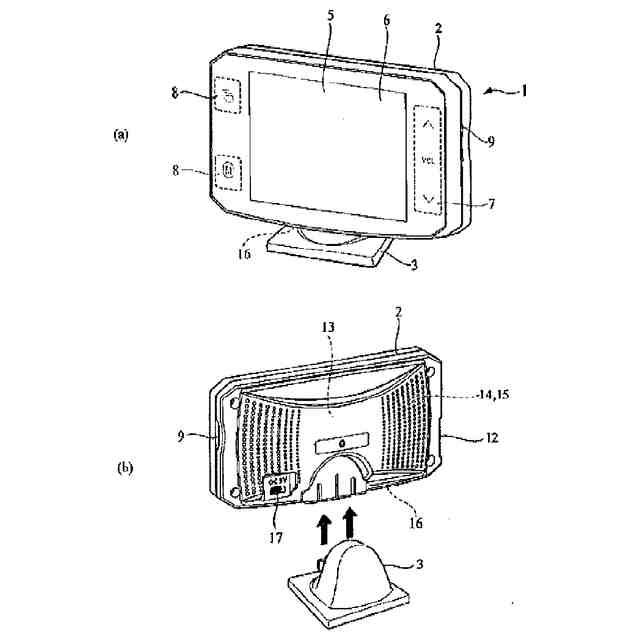
ナビゲーション装置、レーダー探知機等の車載用電子機器は、GPS受信機がGPS衛星からの電波を受信することにより得た信号に基づいて、自車位置の測位を行なっている。ただし、GPSの電波は、車両がトンネル、地下、ビル街、高架下等に入ってしまった場合には、受信が困難となる場合が多い。
【0003】
このため、車載用電子機器は、GPSの電波を受信できない場合に、車両が備えるジャイロセンサー、加速度センサー、車速センサー等からの信号に基づいて、車両の進行方向、傾き、移動距離等を求めて、自車位置の補正を行っている。
【0004】
ただし、車両の進行方向については、ハンドルの舵角を検出する舵角センサーからの信号から求める方が、より正確である。このため、特許文献1に開示されているように、舵角センサーを備えた車両であれば、舵角センサーからの信号を取得することにより、車両の進行方向の変化を正確に検出できる。
【先行技術文献】
【特許文献】
【0005】
特開平7-35566号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、全ての車両が舵角センサーを備えているわけではなく、舵角センサーを有していない車両も多い。また、舵角センサーを備えている車両であっても、車両についての制御を行うネットワークから、舵角センサーからのハンドル舵角の信号を得ることができない場合がある。さらに、ハンドル舵角のデータフォーマット等が公開されておらず、ハンドル舵角を得ることが困難な場合もある。
【0007】
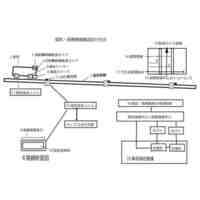
このような舵角センサーを用いることなく、車輪の内輪差または外輪差を検出することで、車両の進行方向を検出することも、特許文献1に記載されている。さらに、同文献には、左右の車速センサーを配置しその出力パルス差(移動距離の差)により、車両の旋回を検出することで、方位の変位量を算出することが記載されている。
【0008】
しかし、このような構成とするには、複数の異なる車輪について、新たに車速センサーを設置して、それらの車速センサーを、それぞれワイヤーを介してシステムに接続する必要があり、設置のための手間とコストがかかる。
【0009】
また、従来の一般的な車速センサーは、1回転につき、2~8パルス程度の信号しか出力できないため、高い分解能が得られない。このため、たとえ車速センサーを用いても、車両の右左折が検出できる程度の精度しか得られず、舵角センサーと同程度の精度は出ない。
【0010】
したがって、例えば、角度があまりない分岐の箇所では、方向の変化を検出できない。また、例えば、高速道路を降りる際に、本線に対して斜め方向に降りて行くような状態を検出できない。さらに、例えば、車線変更の際の方向変化や、同一車線内での方向変化を検出することもできない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
1か月前
個人
自動車ケアフル灯
1か月前
能美防災株式会社
発信機
1か月前
ニッタン株式会社
発信機
11日前
ニッタン株式会社
発信機
11日前
個人
逆走・正走車両検出システム
23日前
日本信号株式会社
情報提供システム
22日前
ホーチキ株式会社
異常報知設備
11日前
ホーチキ株式会社
異常報知設備
2日前
ホーチキ株式会社
監視システム
1か月前
個人
磁気・光学誘導路線による車両の運行制御
16日前
タック株式会社
安全監視システム
1か月前
株式会社JVCケンウッド
通知システム
1か月前
ホーチキ株式会社
非常通報システム
5日前
三菱ロジスネクスト株式会社
搬送システム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
株式会社アジラ
注目行動呼びかけシステム
1か月前
株式会社フィットネスワン
見守りシステム
9日前
三菱ロジスネクスト株式会社
搬送システム
1か月前
トヨタ自動車株式会社
配車システム
15日前
日本信号株式会社
路側装置及びセンサ装置
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
Adora株式会社
アプリ使用制御システム
1日前
東亜電子工業株式会社
警報コントローラ
1か月前
トヨタ自動車株式会社
車両
1か月前
能美防災株式会社
非常報知システム
1か月前
トヨタ自動車株式会社
運転支援装置
12日前
株式会社アドヴィックス
走行支援システム
3日前
愛知時計電機株式会社
生活データ集計装置
1か月前
矢崎総業株式会社
路面監視装置
1か月前
株式会社アイシン
重畳画像表示装置
10日前
株式会社アイシン
重畳画像表示装置
10日前
パナソニックIPマネジメント株式会社
火災警報器
1か月前
トヨタ自動車株式会社
配車装置
22日前
個人
除排雪判断支援システムおよびプログラム、道路管理方法
1か月前
トヨタ自動車株式会社
警報システム
9日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ