TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025047803
公報種別
公開特許公報(A)
公開日
2025-04-03
出願番号
2023156521
出願日
2023-09-21
発明の名称
状態量推定方法、および状態量推定装置
出願人
日本防蝕工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G01N
27/26 20060101AFI20250326BHJP(測定;試験)
要約
【課題】計算時間を短縮するとともに初期状態の付与が不正確であっても正確な推定値を算出できる状態量推定方法、および状態量推定装置を提供する。
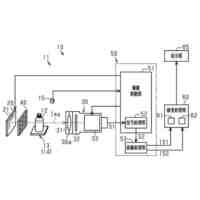
【解決手段】複数の電位センサが固定された移動体を電解質中で移動させながら犠牲陽極の周囲の電位の測定値を取得する取得ステップと、複数の初期状態を与える初期状態付与ステップと、複数の初期状態に対しそれぞれ状態量の推定値を算出する演算ステップと、演算ステップで算出された複数の推定値のうち最も確からしいものを判定する判定ステップと、を有し、判定ステップにおいて、複数の初期状態に対応して算出される複数の推定値のうち値が近いもの同士を同じグループとして複数のグループに分類し、複数のグループのうち、所属する推定値の個数が最も多いものを最も確からしい推定値と判定する、状態量推定方法。
【選択図】図2
特許請求の範囲
【請求項1】
電解質中において犠牲陽極で防食された金属製の構造物の電気防食状態を表す未知の状態量を、状態量推定モデルを用いて推定する状態量推定方法であって、
所定時間の間において複数の電位センサが固定された移動体を前記電解質中で移動させながら前記犠牲陽極の周囲の電位の測定値を取得する取得ステップと、
複数の初期状態を与える初期状態付与ステップと、
複数の前記初期状態に対しそれぞれ前記状態量の推定値を算出する演算ステップと、
前記演算ステップで算出された複数の前記推定値のうち最も確からしいものを判定する判定ステップと、を有する、
状態量推定方法。
続きを表示(約 1,600 文字)
【請求項2】
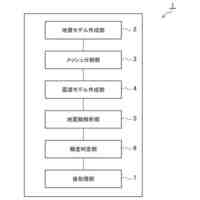
前記演算ステップは、
前記状態量推定モデルを用いて、前記初期状態を最初の「前の状態」とし、前の状態から時間的に更新した次の状態を予測する予測ステップと、
前記予測ステップで予測された前記状態量を電位の予測値に変換する変換ステップと、
前記変換ステップで算出された前記電位の予測値と観測値とを比較する比較ステップと、
前記比較ステップで比較された結果を基に前記次の状態を確率的に最も真値に近い状態に修正する修正ステップと、を有し、
前記演算ステップにおいて、前記予測ステップと前記変換ステップと前記比較ステップと前記修正ステップとを、観測時間内において繰り返し行い、前記移動体の位置、姿勢および前記犠牲陽極から出力される防食電流の値を含む前記状態量の前記推定値を算出し、
前記判定ステップにおいて、複数の前記初期状態に対応して算出される複数の前記推定値のうち値が近いもの同士を同じグループとして複数の前記グループに分類し、複数の前記グループのうち、所属する前記推定値の個数が最も多いものを最も確からしい推定値と判定する、
請求項1に記載の状態量推定方法。
【請求項3】
前記演算ステップにおいて、前記予測ステップと前記変換ステップと前記比較ステップと前記修正ステップとを、観測時間A内において一定のサンプリング間隔Tでn回(n=A/T)だけ繰り返し行う、
請求項2に記載の状態量推定方法。
【請求項4】
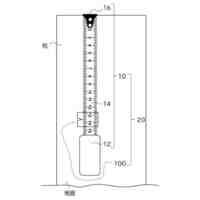
前記取得ステップにおいて、前記移動体を前記電解質中で鉛直方向に移動させ、
前記初期状態付与ステップで付与される複数の前記初期状態は、前記移動体の水平方向の初期位置である、
請求項1に記載の状態量推定方法。
【請求項5】
前記取得ステップにおいて、前記移動体に固定される水深センサを用いて前記電解質中の前記移動体の鉛直方向の位置を水深として取得する、
請求項4に記載の状態量推定方法。
【請求項6】
前記取得ステップを行う際の前記移動体の姿勢が一定であるものとして前記演算ステップを行う、
請求項5に記載の状態量推定方法。
【請求項7】
前記状態量の前記推定値が、前記防食電流の値であり、
前記判定ステップにおいて、±0.1A以内の範囲に含まれる前記推定値を同じ前記グループとして分類する、
請求項2に記載の状態量推定方法。
【請求項8】
前記取得ステップを行う際の前記移動体の姿勢を一定であるものとして前記演算ステップを行う、
前記取得ステップを行う際の前記移動体の水平方向の位置を一定であるものとして前記演算ステップを行う、
又は、前記取得ステップにおいて、前記移動体に固定される水深センサを用いて前記電解質中の前記移動体の鉛直方向の位置を水深として取得し、前記演算ステップにおいて前記移動体の鉛直方向の位置を既知の値として扱う、
の何れか1つ又は2つ以上を選択して行う、
請求項1に記載の状態量推定方法。
【請求項9】
前記演算ステップは、拡張カルマンフィルタによる前記状態量推定モデルが用いられる、
請求項1に記載の状態量推定方法。
【請求項10】
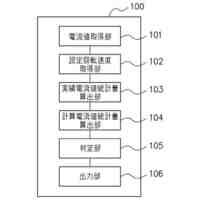
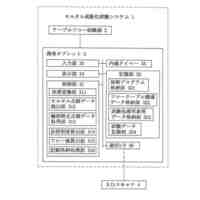
請求項1~9の何れか一項に記載の状態量推定方法を行う状態量推定装置であって、
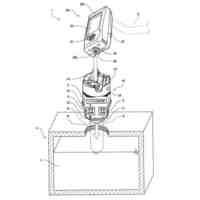
前記電解質中に沈められる前記移動体と、
前記移動体に固定され前記電解質中の前記電位を測定する複数の電位センサを有する測定部と、
前記演算ステップを行う演算部と、を有する、
状態量推定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、状態量推定方法、および状態量推定装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
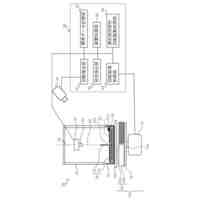
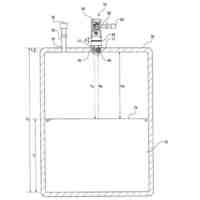
水中に設置される鋼製の構造物の腐食を防止するために、一般的に犠牲陽極が用いられる。犠牲陽極には、鋼材よりも電気化学的にイオン化傾向が大きいアルミニウム、亜鉛、マグネシウムを各々主成分とした合金が使用され、構造物に取り付けられ犠牲陽極自体が腐食することで、構造物の腐食を抑制する。犠牲陽極は、経時的に消耗するため定期的に更新する必要がある。犠牲陽極の健全度の評価を行うため、また、更新時期を把握するために、犠牲陽極の体積測定や重量測定を行い、犠牲陽極の消耗度合を推定する方法がある。例えば、ダイバーが水中の犠牲陽極の周長測定を行い、体積を算出して残寿命を求める方法である。しかしながら、ダイバーによる測定は、安全面に懸念があるばかりか労力が大きく検査作業に時間を要し、コストが増加する。
【0003】
出願人は、水中において犠牲陽極の周囲の電位を解析することで、犠牲陽極から出力される防食電流の値を推定し犠牲陽極の残寿命を求める方法を提案している(例えば特許文献1)。特許文献1に記載された方法では、電位を測定する複数の測定部を水中で鉛直方向に移動させ犠牲陽極の周囲の電位を測定する。また、特許文献1では、水中の測定部の位置が不明確な場合であっても、犠牲陽極から出力される防食電流の値を推定するためにパーティクルフィルタを用いた状態量推定を行うことが提案されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-039036号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
パーティクルフィルタを用いた推定手法では、複数の状態量に対し変化を予測し修正しながら状態量を推定するため付与する初期状態に誤りがあっても正しい推定値を算出できるという利点がある。しかしながら、一方で、パーティクルフィルタを用いる場合、複数の状態量の全てについて予測および修正を行うために計算量が膨大となり計算時間が長くなりすぎるという問題があった。そこで、本発明者らは、拡張カルマンフィルタなどの他の推定手法を採用することで計算時間を短縮することを検討した。しかしながら、これらの推定手法では、入力される初期状態に誤りがあると正しい推定値を算出できない場合がある。このため、測定者が測定部の初期位置を正確に把握できていない場合、又は間違って把握した場合に正確な推定値を算出できない虞がある。
【0006】
本発明は前記課題に鑑みてなされたものであり、計算時間を短縮するとともに初期状態の付与が不正確であっても正確な推定値を算出できる状態量推定方法、および状態量推定装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
一態様の状態量推定方法は、電解質中において犠牲陽極で防食された金属製の構造物の電気防食状態を表す未知の状態量を、状態量推定モデルを用いて推定する状態量推定方法であって、所定時間の間において複数の電位センサが固定された移動体を前記電解質中で移動させながら前記犠牲陽極の周囲の電位の測定値を取得する取得ステップと、複数の初期状態を与える初期状態付与ステップと、複数の前記初期状態に対しそれぞれ前記状態量の推定値を算出する演算ステップと、前記演算ステップで算出された複数の前記推定値のうち最も確からしいものを判定する判定ステップと、を有する。
【0008】
この構成によれば、電解質中に設置された犠牲陽極の周囲で電位を測定する場合、演算ステップにおいて複数の初期状態を基に複数の推定値を算出し、判定ステップにおいて最も確からしい推定値を判定する。このため、演算ステップにおいて値の正確さを判定する演算を省略することができ、演算ステップに要する計算量を低減でき、全体としての計算時間を短縮できる。
【0009】
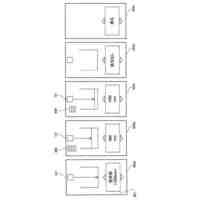
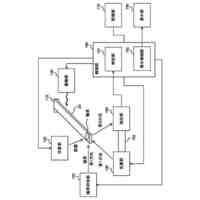
上述の状態量推定方法において、前記演算ステップは、前記状態量推定モデルを用いて、前記初期状態を最初の「前の状態」とし、前の状態から時間的に更新した次の状態を予測する予測ステップと、前記予測ステップで予測された前記状態量を電位の予測値に変換する変換ステップと、前記変換ステップで算出された前記電位の予測値と観測値とを比較する比較ステップと、前記比較ステップで比較された結果を基に前記次の状態を確率的に最も真値に近い状態に修正する修正ステップと、を有し、前記演算ステップにおいて、前記予測ステップと前記変換ステップと前記比較ステップと前記修正ステップとを、観測時間内において繰り返し行い、前記移動体の位置、姿勢および前記犠牲陽極から出力される防食電流の値を含む前記状態量の前記推定値を算出し、前記判定ステップにおいて、複数の前記初期状態に対応して算出される複数の前記推定値のうち値が近いもの同士を同じグループとして複数の前記グループに分類し、複数の前記グループのうち、所属する前記推定値の個数が最も多いものを最も確からしい推定値と判定してもよい。
【0010】
この構成によれば、移動体の位置および姿勢が不安定な状態であっても、状態量推定を行うことにより犠牲陽極の防食電流の値をも算出することができる。さらに、判定ステップでは、近い値の推定値の個数を基に確からしい推定値と判定するため、判定ステップに計算時間をほとんど割くことがなく、正しい推定値を算出できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
位置検出装置
3日前
株式会社ハシマ
検針機
6日前
東レ株式会社
シート状物の検査方法
1日前
東ソー株式会社
自動分析装置及び方法
3日前
富士電機株式会社
エンコーダ
1日前
株式会社ヨコオ
シートコンタクタ
3日前
TDK株式会社
温度センサ
1日前
本田技研工業株式会社
物体検出装置
6日前
本田技研工業株式会社
物体検出装置
6日前
スタンレー電気株式会社
車両前方視認装置
6日前
スタンレー電気株式会社
車両前方視認装置
6日前
ダイハツ工業株式会社
凹部の深さ測定方法
6日前
セイコーエプソン株式会社
干渉計
3日前
JRCモビリティ株式会社
充電用温度判定回路
3日前
日本信号株式会社
表示装置
1日前
TDK株式会社
センサ
1日前
株式会社JVCケンウッド
撮像装置及び測距方法
6日前
内山工業株式会社
分析装置用部材
2日前
日東建設株式会社
ボルト・ナットの健全性検査装置
6日前
株式会社SUBARU
蓄電池の状態センサ装置
3日前
日本製鉄株式会社
回転機械の異常診断支援方法及び装置
1日前
大成建設株式会社
地震動解析システム
1日前
株式会社キーエンス
レベル計
6日前
国立大学法人 東京大学
粘性の測定装置及び方法
2日前
株式会社キーエンス
レベル計
6日前
株式会社キーエンス
レベル計
6日前
住友電気工業株式会社
光モジュール
6日前
株式会社キーエンス
レベル計
6日前
株式会社ケー・エフ・シー
モルタル流動性試験システム
6日前
株式会社キーエンス
レベル計
6日前
個人
位置決め具及び位置決め具付きコンベックスルール
6日前
倉敷化工株式会社
動特性測定装置
6日前
日本特殊陶業株式会社
ガスセンサ
1日前
株式会社エヌテック
物品検査装置及び物品検査方法
1日前
日本特殊陶業株式会社
ガスセンサ
1日前
国立大学法人島根大学
検査方法及び検査装置
1日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ