TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025043547
公報種別
公開特許公報(A)
公開日
2025-04-01
出願番号
2023150891
出願日
2023-09-19
発明の名称
撮像装置及び測距画像信頼性検出方法
出願人
株式会社JVCケンウッド
代理人
個人
主分類
G01S
7/497 20060101AFI20250325BHJP(測定;試験)
要約
【課題】物体の動きを高い精度で検出して信頼性の高い測距データを取得する技術を提供する。
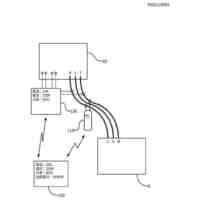
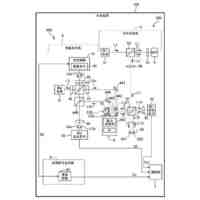
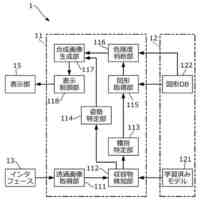
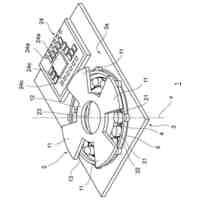
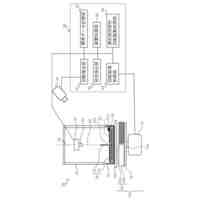
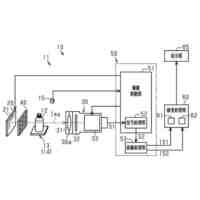
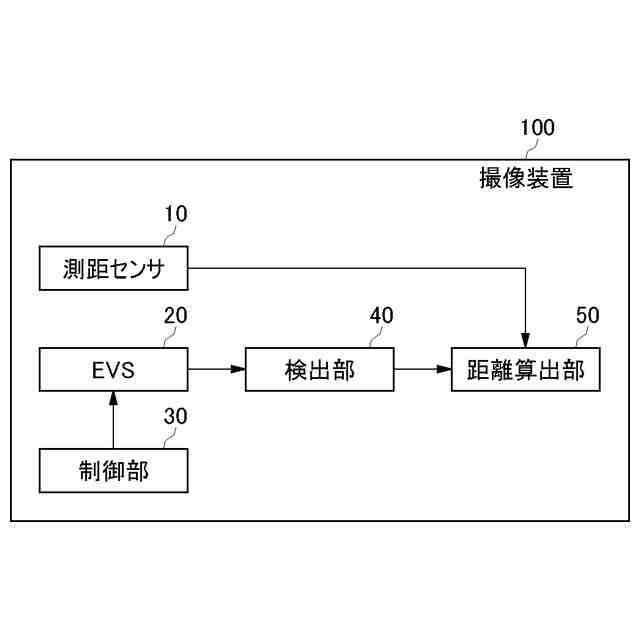
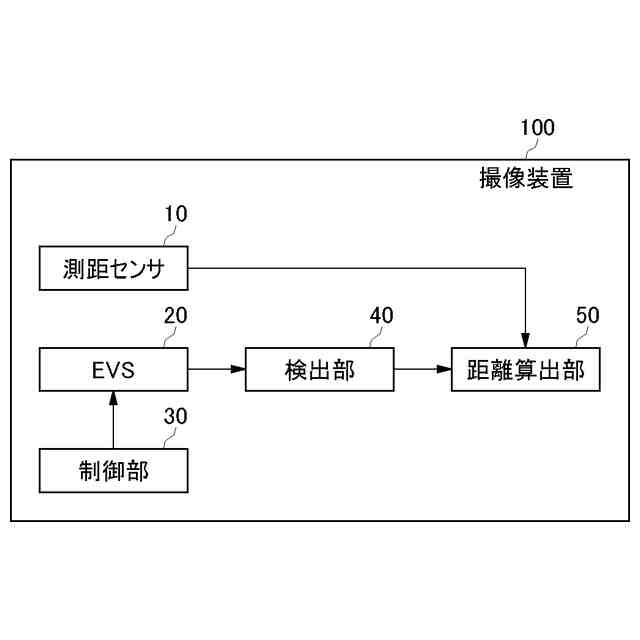
【解決手段】測距センサ10は、測距対象に光を照射し、測距対象からの反射光を撮影して測距画像を取得する。イベントベースビジョンセンサ20は、測距対象を撮影して画素毎の輝度変化を検出する。制御部30は、測距センサの露光期間に同期してイベントベースビジョンセンサのリセットタイミングと出力タイミングを制御する。検出部40は、イベントベースビジョンセンサによって所定の閾値以上の輝度変化が検出された画素に対応する測距画像の画素を測距画像の信頼性の低い画素として検出する。
【選択図】図1
特許請求の範囲
【請求項1】
測距対象に光を照射し、前記測距対象からの反射光を撮影して測距画像を取得する測距センサと、
前記測距対象を撮影して画素毎の輝度変化を検出するイベントベースビジョンセンサと、
前記測距センサの露光期間に同期して前記イベントベースビジョンセンサのリセットタイミングと出力タイミングを制御する制御部と、
前記イベントベースビジョンセンサによって所定の閾値以上の輝度変化が検出された画素に対応する前記測距画像の画素を前記測距画像の信頼性の低い画素として検出する検出部とを含むことを特徴とする撮像装置。
続きを表示(約 720 文字)
【請求項2】
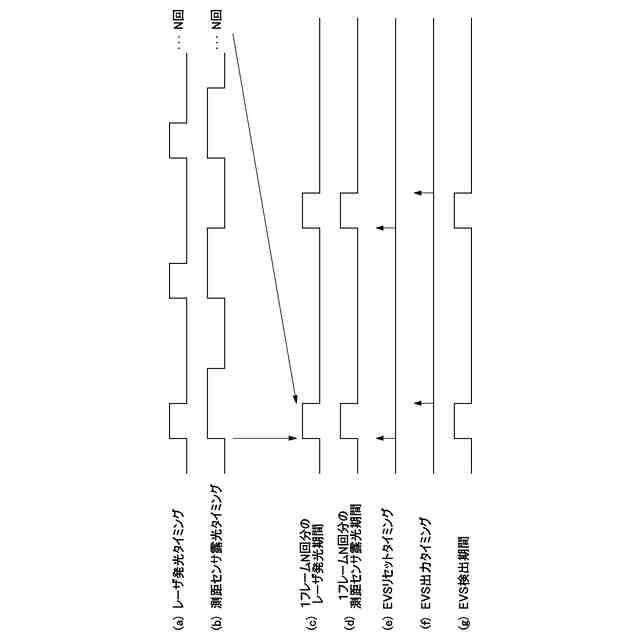
前記測距センサによる測距を1フレームあたりN回(Nは2以上の自然数)行って検出値を蓄積する場合、前記制御部は、N回の測距の内、最初の測距の測定開始タイミングで前記イベントベースビジョンセンサをリセットし、N回の測距の内、最後の測距の測定終了タイミングで前記イベントベースビジョンセンサの出力を取り出すことを特徴とする請求項1に記載の撮像装置。
【請求項3】
前記測距センサは、測距対象に赤外光を照射し、前記測距対象からの反射光を撮影して前記測距画像を取得し、
前記イベントベースビジョンセンサは、可視光が照射された前記測距対象を撮影して画素毎の輝度変化を検出することを特徴とする請求項1または2に記載の撮像装置。
【請求項4】
前記イベントベースビジョンセンサの受光面の前に、可視光を透過するが赤外光を透過しない光学フィルタが挿入されることを特徴とする請求項3に記載の撮像装置。
【請求項5】
測距センサによって測距対象に光を照射し、前記測距対象からの反射光を撮影して測距画像を取得するステップと、
イベントベースビジョンセンサによって前記測距対象を撮影して画素毎の輝度変化を検出するステップと、
前記測距センサの露光期間に同期して前記イベントベースビジョンセンサのリセットタイミングと出力タイミングを制御するステップと、
前記イベントベースビジョンセンサによって所定の閾値以上の輝度変化が検出された画素に対応する前記測距画像の画素を前記測距画像の信頼性の低い画素として検出するステップとを含むことを特徴とする測距画像信頼性検出方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、撮像装置及び測距画像信頼性検出方法に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
物体に赤外光を照射して反射光を受光するまでの時間を測定することによって物体までの距離を算出するToF(Time of Flight)カメラがあり、物体認識や物体の三次元計測などに利用されている。
【0003】
特許文献1には、物体の動きの検出結果に基づいて物体までの距離を示す距離データ又は距離データの信頼度を補正する測距技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-081290号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ToFカメラは、1測距あたり複数回、赤外線を物体に短時間照射して露光し、物体までの距離を算出する。そのため1測距時間内に測距対象の物体が移動すると正しい測距データを得ることが困難になる。不正確な距離データは、そのままでは使用できないため、画面内の不正確な測距データの位置を特定し、補正、置き換え、破棄などの処理を行うことによって測距データの信頼性を確保する必要がある。
【0006】
物体の動き検出には、
(1)ToFカメラで測距に用いる赤外映像の前後の映像フレームの露光データを用いる方法、及び
(2)ToFカメラと同時に撮像した可視光カメラの映像を用いる方法
がある。
【0007】
(1)及び(2)の方法で物体の動きを検出するためには、測距データと同タイミングのフレームと直前のフレームのコントラストの差分を検出することが必要である。2フレーム分の映像データ、画像解析、補正値作成処理が必要となるため、距離データの出力時刻に対して物体の動き検出の出力時刻は遅延する。また、移動した測距対象と移動していない測距対象のコントラストの差が小さい場合は、物体の動き検出ができない可能性がある。
【0008】
また(2)の方法では、可視光カメラの露光時間がToFカメラの露光時間と同期しないため、物体の動き量に不一致が発生する。
【0009】
さらに、物体の動き検出に映像を使用しない場合は、
(3)前後のフレームの測距データを用いる方法
がある。
【0010】
(3)の方法でも2フレームのデータが必要であることは、(1)及び(2)の方法と同様である。これに加え、物体のエッジ部分の測距データは、赤外光の反射が減少するため、原理上不正確な傾向にある。遠距離にある被写体の測距データも同様の傾向があり、測距データのみではデータの不正確さのため、物体の動き検出を行うことは困難である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
位置検出装置
6日前
東レ株式会社
シート状物の検査方法
4日前
エイブリック株式会社
電流検出回路
3日前
株式会社チノー
放射光測温装置
3日前
東ソー株式会社
自動分析装置及び方法
6日前
日本特殊陶業株式会社
ガスセンサ
3日前
日本特殊陶業株式会社
ガスセンサ
3日前
株式会社 キョーワ
食品搬送装置
3日前
富士電機株式会社
エンコーダ
4日前
日本碍子株式会社
ガスセンサ
3日前
株式会社ヨコオ
シートコンタクタ
6日前
TDK株式会社
温度センサ
4日前
シチズンファインデバイス株式会社
圧力検出装置
3日前
シチズンファインデバイス株式会社
圧力検出装置
3日前
オムロン株式会社
光電センサ
3日前
旭光電機株式会社
電気的特性提供装置
3日前
TDK株式会社
センサデバイス
3日前
株式会社ミツバ
モータ制御装置
3日前
セイコーエプソン株式会社
干渉計
6日前
JRCモビリティ株式会社
充電用温度判定回路
6日前
内山工業株式会社
分析装置用部材
5日前
日本信号株式会社
表示装置
4日前
TDK株式会社
センサ
4日前
株式会社オーケープランニング
スパン調整法
3日前
大陽日酸株式会社
試験体の熱特性を測定する試験装置
3日前
株式会社SUBARU
蓄電池の状態センサ装置
6日前
日本製鉄株式会社
回転機械の異常診断支援方法及び装置
4日前
株式会社半導体エネルギー研究所
分析用セル及びX線回折装置
3日前
大成建設株式会社
地震動解析システム
4日前
ミネベアミツミ株式会社
角度センサ及び回転機器
3日前
国立大学法人 東京大学
粘性の測定装置及び方法
5日前
株式会社エヌテック
物品検査装置及び物品検査方法
4日前
キヤノン株式会社
アレイプレートの処理方法及び処理装置
3日前
株式会社アイシン
乗員検知装置
6日前
トヨタ自動車株式会社
車両部品の残存寿命予測装置
4日前
国立大学法人島根大学
検査方法及び検査装置
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ