TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025042147
公報種別
公開特許公報(A)
公開日
2025-03-27
出願番号
2023148990
出願日
2023-09-14
発明の名称
搬送トレイおよびワーク作業装置
出願人
国立大学法人 東京大学
,
株式会社椿本チエイン
代理人
個人
,
個人
主分類
H01L
21/673 20060101AFI20250319BHJP(基本的電気素子)
要約
【課題】簡単な構成で、周囲に干渉物の多い箇所にもワークを搬送可能で、作業者の負担の増加や作業効率の低下がなく、作業位置でワークの向きや傾きを微調整可能な搬送トレイを提供すること。
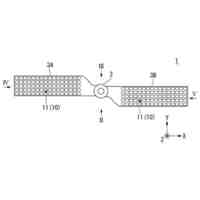
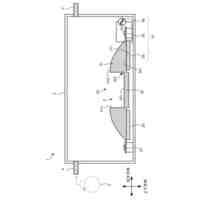
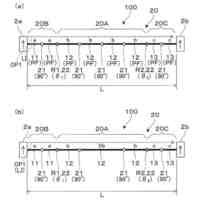
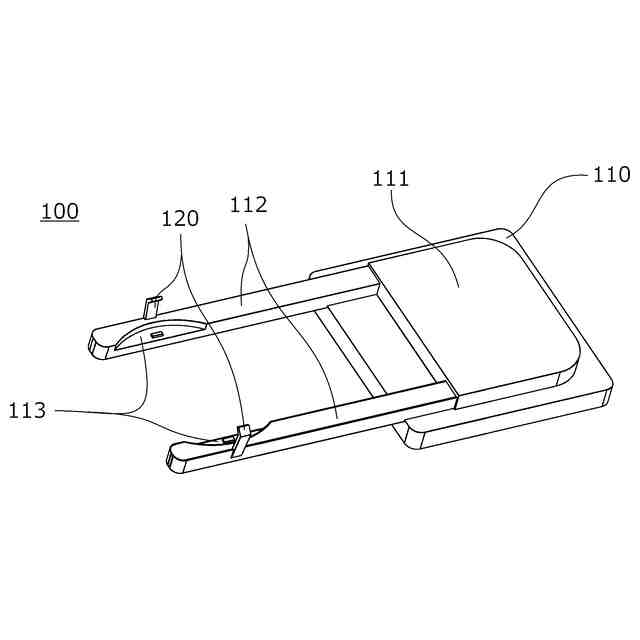
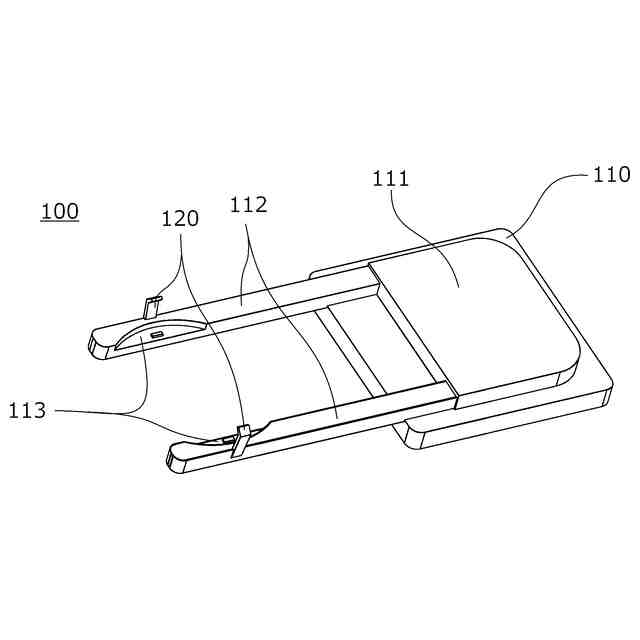
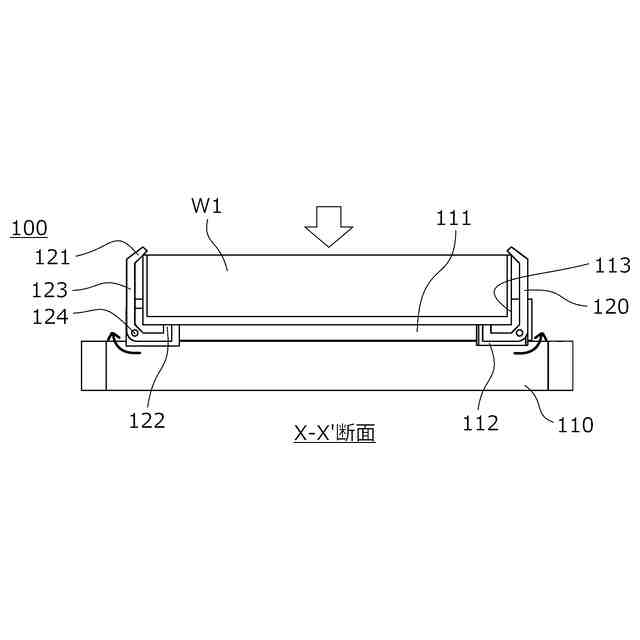
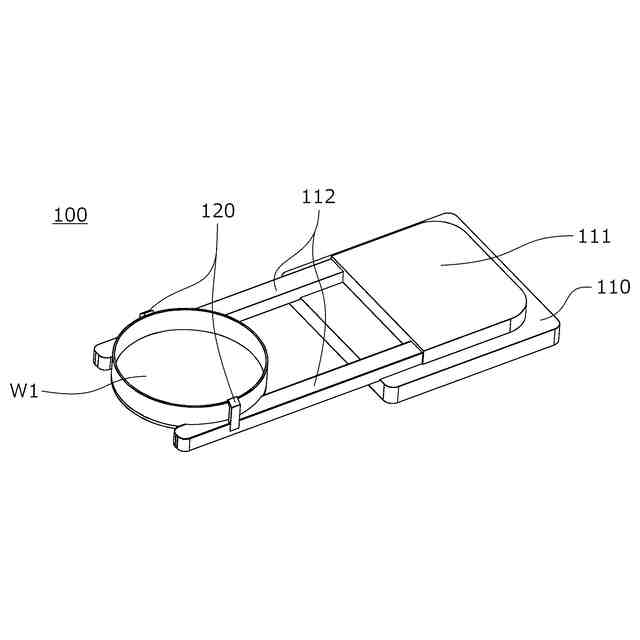
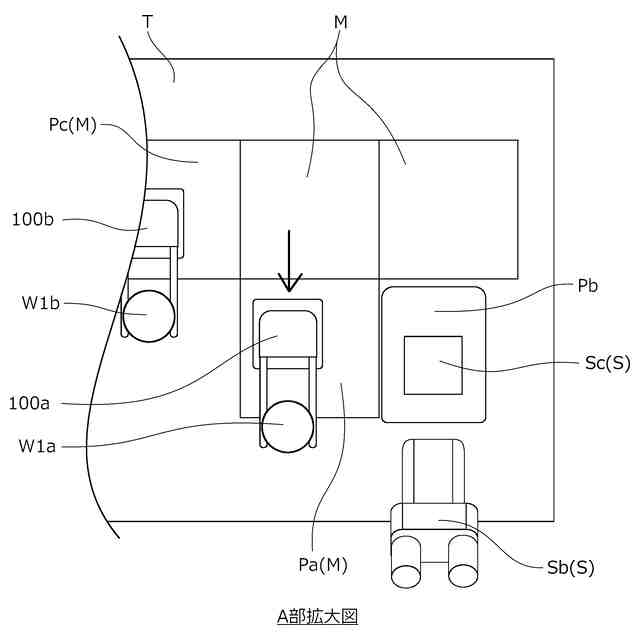
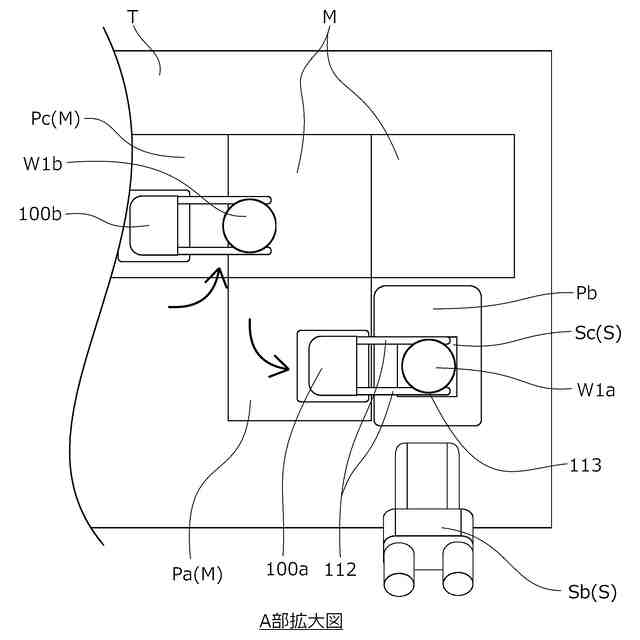
【解決手段】磁気によって搬送路M上を浮上して移動可能な本体部110と、本体部110に接続された支持アーム112と、支持アーム112に設けられたワーク保持部113とを有する搬送トレイ100であって、支持アーム112は、本体部110の側方に延びてワーク保持部113でワークWの側方を1対で支持するように構成され、ワーク保持部113は、支持アーム112のうち、本体部110に対して上下方向に干渉しない位置に設けられていること。
【選択図】図1
特許請求の範囲
【請求項1】
磁気によって搬送路上を浮上して移動可能な本体部と、前記本体部に接続された支持アームと、前記支持アームに設けられたワーク保持部とを有する搬送トレイであって、
前記支持アームは、前記本体部の側方に延びて前記ワーク保持部でワークの側方を1対で支持するように構成され、
前記ワーク保持部は、前記支持アームのうち、前記本体部に対して上下方向に干渉しない位置に設けられていることを特徴とする搬送トレイ。
続きを表示(約 930 文字)
【請求項2】
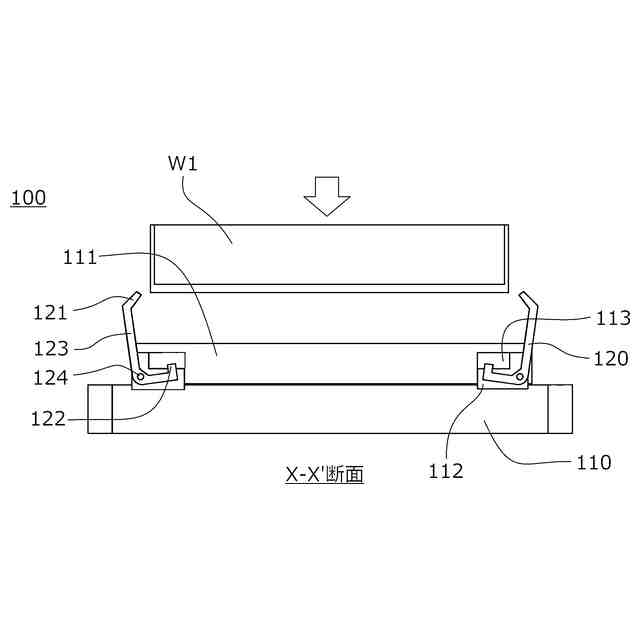
前記ワーク保持部には、ワークを上下方向に挟持可能な保持ツメが設けられていることを特徴とする請求項1に記載の搬送トレイ。
【請求項3】
前記保持ツメは、ワークを上下方向に挟持する際にワークの上部に接触する上部押え部およびワークの下部に接触する下部押え部と、前記上部押え部と前記下部押え部とを接続する接続片とを有し、
前記接続片は、前記ワーク保持部と回転軸を介して傾動可能に接続されていることを特徴とする請求項2に記載の搬送トレイ。
【請求項4】
前記支持アームは、1対の第1支持アームと、1対の第2支持アームとを少なくとも有し、
前記第2支持アームには、前記第1支持アームに設けられた第1ワーク保持部と別にワークを保持可能な第2ワーク保持部を有することを特徴とする請求項1に記載の搬送トレイ。
【請求項5】
前記第2支持アームは、前記本体部を挟んで前記第1支持アームと反対側に延びるように設けられ、
前記第2ワーク保持部は、前記本体部を挟んで前記第1ワーク保持部と反対側の位置に設けられていることを特徴とする請求項4に記載の搬送トレイ。
【請求項6】
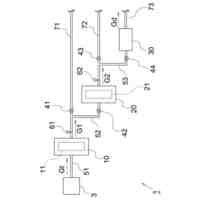
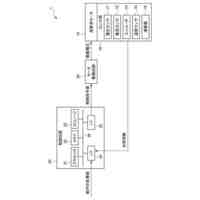
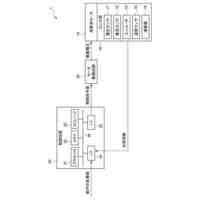
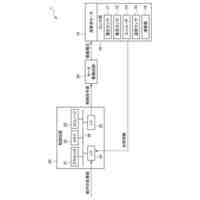
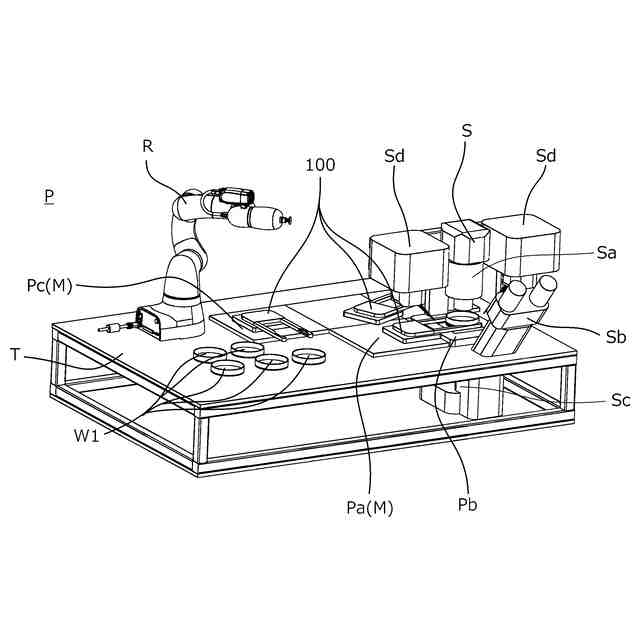
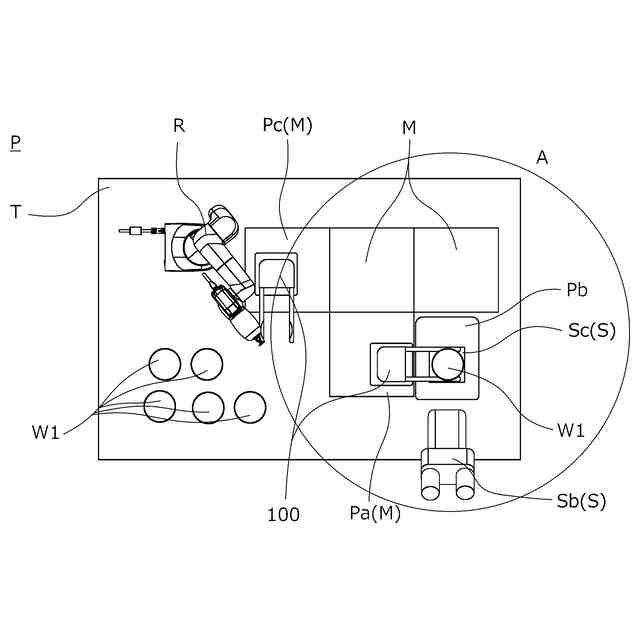
請求項1乃至請求項5のいずれかに記載の搬送トレイを搬送可能な磁気式搬送路と、前記搬送トレイにワークを搬入出するワーク搬入出ユニットと、前記搬送トレイに搭載したワークに対して作業を実施する作業ユニットと、前記磁気式搬送路を制御する制御ユニットとを有するワーク作業装置であって、
前記ワーク搬入出機構は、前記磁気式搬送路上の搬入出位置に配置された前記搬送トレイにワークを搬入出可能に構成され、
前記作業ユニットは、前記磁気式搬送路上の作業位置に配置された前記搬送トレイに保持されたワークに対して作業を実施可能に構成されていることを特徴とするワーク作業装置。
【請求項7】
前記作業ユニットは、前記磁気式搬送路上の作業位置に配置された前記搬送トレイに保持されたワークのうち、前記磁気式搬送路外に位置するワークに対して作業することを特徴とする請求項6に記載のワーク作業装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、磁気によって搬送路上を浮上して移動可能な搬送トレイに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、磁気によって搬送路上を浮上して移動可能な搬送トレイは、様々なものが提案されており、例えば特許文献1に記載の基板を処理するシステムの搬送トレイ(搬送モジュール)が公知である。
【0003】
この特許文献1で公知の搬送トレイ(搬送モジュール20、30、60)は、作業空間(真空搬送室120)内で第1の磁石が設けられた磁気搬送路(床面部10)上を、磁気浮上によって浮いた状態で移動可能であり、作業空間(真空搬送室120)内の所定の位置(載置部4)に搬送トレイ(搬送モジュール20、30、60)を位置させ、ロボットアーム(ウエハ搬送アーム5)によって搬送トレイ(搬送モジュール20、30、60)上のワーク(ウエハW)をウエハ処理室110へ搬送できるものである。
【0004】
また、例えば、特許文献2に記載の基板検査装置1では、ワーク(ウエハW)を搬送するためにロボットアーム(搬送ロボット12)を使用しているものが公知である。
この特許文献2で公知の基板検査装置1は、ロボットアーム(搬送ロボット12)でカセット13から取り出したワーク(ウエハW)をマクロ検査およびミクロ検査を行うための装置であり、マクロ検査では目視で検査し、ミクロ検査では顕微鏡5によりワーク(ウエハW)の表面を部分拡大して検査するものである。
顕微鏡5は顕微鏡5の観察光軸に直交するX軸Y軸の2軸方向に移動可能であり、ミクロ検査を行う場合、顕微鏡5の観察位置に到達させることでロボットアーム(搬送ロボット12)に保持されたワーク(ウエハW)の表面を検査可能にするものである。
【0005】
ロボットアーム(搬送ロボット12)は検査位置までワーク(ウエハW)を保持して移動可能な構成であればよいため、例えば、特許文献1で公知の磁気浮上で移動可能な搬送トレイ(搬送モジュール20、30、60)を、特許文献2に記載されているような基板検査装置1のロボットアーム(搬送ロボット12)の代わりに使用することもできる。
【先行技術文献】
【特許文献】
【0006】
特開2022-113548号公報
特開2009-210419号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところが、特許文献1で公知の搬送トレイおよび特許文献2で公知の基板検査装置には、未だ改善の余地があった。
【0008】
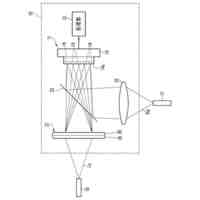
すなわち、特許文献2で公知の基板検査装置は、顕微鏡がワークの表面に照射された照射光を反射光として受光することでワーク表面をミクロ検査可能とするものだが、例えば、プレパラートやシャーレ等のワーク内の細胞等の検体に上方または下方から照射光を照射し、ワーク内の検体を透過した透過光を受光して検体を観察する方式の透過型顕微鏡では、特許文献1で公知の磁気浮上する搬送トレイ上に乗せたままのワークを観察位置まで搬送できない虞があった。
また、ロボットアームでワークの周囲を保持して作業位置から観察位置まで差し入れることも考えられるが、特に、透過型顕微鏡の一種である倒立型顕微鏡では、観察位置でワーク内の検体をマニプレータやシリンジ等で操作することも多く、観察位置の周囲にマニプレータやシリンジ等の機材が固定的に配置された場合、ロボットアームが機材に干渉してワークを観察位置に進入困難になる虞や、機材を避けながらワークを観察位置に進入できたとしても、ロボットアームによる作業位置からのワークの向きや傾きの微調整が困難になる虞があった。
また、観察位置の周囲の機材を移動可能に構成した場合でも、ワークを観察位置に進入させる度に機材を移動させる手間がかかり、作業者の負担が増加する虞や、作業効率が低下してしまう虞があった。
【0009】
本発明は、これらの問題点を解決するものであり、簡単な構成で、透過型顕微鏡の観察位置のような周囲に干渉物の多い箇所にもワークを搬送可能で、作業者の負担の増加や作業効率の低下がなく、作業位置でワークの向きや傾きを微調整可能な搬送トレイを提供することを目的とするものである。
【課題を解決するための手段】
【0010】
本発明の搬送トレイは、磁気によって搬送路上を浮上して移動可能な本体部と、前記本体部に接続された支持アームと、前記支持アームに設けられたワーク保持部とを有する搬送トレイであって、前記支持アームは、前記本体部の側方に延びて前記ワーク保持部でワークの側方を1対で支持するように構成され、前記ワーク保持部は、前記支持アームのうち、前記本体部に対して上下方向に干渉しない位置に設けられていることにより、前記課題を解決するものである。
【発明の効果】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人 東京大学
プロペラ
5か月前
国立大学法人 東京大学
ガス処理方法
7日前
国立大学法人 東京大学
担持金属触媒
21日前
国立大学法人 東京大学
せん妄判定方法
1か月前
国立大学法人 東京大学
化学センサ用基材
4か月前
国立大学法人 東京大学
コンパレータ回路
11日前
国立大学法人 東京大学
ソフトエクソスーツ
4か月前
国立大学法人 東京大学
微粒子分離システム
4か月前
国立大学法人 東京大学
ビーム追従システム
2日前
国立大学法人 東京大学
超音波モータシステム
1か月前
国立大学法人 東京大学
超音波モータシステム
1か月前
国立大学法人 東京大学
超音波モータシステム
1か月前
国立大学法人 東京大学
振動変換器及び噴霧器
4か月前
国立大学法人 東京大学
光学装置及びレーザー
3か月前
AGC株式会社
組成物
3か月前
国立大学法人 東京大学
結晶、及びその製造方法
2か月前
国立大学法人 東京大学
推定装置、及びプログラム
22日前
国立大学法人 東京大学
テラヘルツ帯同期検波回路
1か月前
国立大学法人 東京大学
生分解性ポリマー複合材料
5か月前
国立大学法人 東京大学
肝臓オルガノイド成熟培地
1日前
NTT株式会社
圧力センサ
22日前
国立大学法人 東京大学
読出回路及び磁気メモリ装置
21日前
国立大学法人 東京大学
消化管幹細胞活性化用組成物
5か月前
国立大学法人 東京大学
嗅覚受容体の応答感度増強剤
2か月前
国立大学法人 東京大学
接着性細胞の浮遊培養用基材
7日前
国立大学法人 東京大学
テラヘルツ波帯位相変調回路
1か月前
国立大学法人 東京大学
情報処理装置、及びプログラム
1か月前
国立大学法人 東京大学
ドローンを用いた配送システム
7日前
国立大学法人 東京大学
炭酸カルシウム結晶の製造方法
5か月前
住友化学株式会社
原子力電池
4か月前
株式会社アイシン
有機酸除去方法
3か月前
積水化学工業株式会社
酸素発生剤
1か月前
国立大学法人 東京大学
光デバイス及びコヒーレント受信器
1か月前
古河電気工業株式会社
超電導モータ
1か月前
国立大学法人 東京大学
ホウ素含有化合物及びそれを含む医薬
1か月前
ダイキン工業株式会社
層及び構造体
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ