TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025044315
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023151803
出願日
2023-09-20
発明の名称
情報処理システム、プログラム及び情報処理方法
出願人
国立大学法人 東京大学
,
株式会社gluon
代理人
弁理士法人IPX
主分類
G06T
17/20 20060101AFI20250326BHJP(計算;計数)
要約
【課題】現実空間の構造を示す現実空間情報と現実空間をセンシングした情報とに基づいて仮想空間を出力することが可能な技術を、又は、センシング情報の取得の方法の種類によらずに、センシング情報の出力先のシステムがセンシング情報を活用することが可能な技術を提供する。
【解決手段】本発明の一態様によれば、情報処理システムが提供される。この情報処理システムは、次の各ステップを実行する少なくとも1つ以上のプロセッサを備える。空間受信ステップでは、現実空間情報を受け付ける。現実空間情報は、現実空間の構造を示す情報である。受信ステップでは、センシング情報を受け付ける。センシング情報は、現実空間をセンシングすることによって得られる情報である。空間出力ステップでは、仮想空間情報をリアルタイムで出力する。仮想空間情報は、センシング情報が示すセンシングの結果が、現実空間情報が示す現実空間の構造に反映された仮想空間を示す情報である。
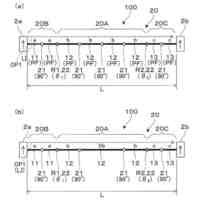
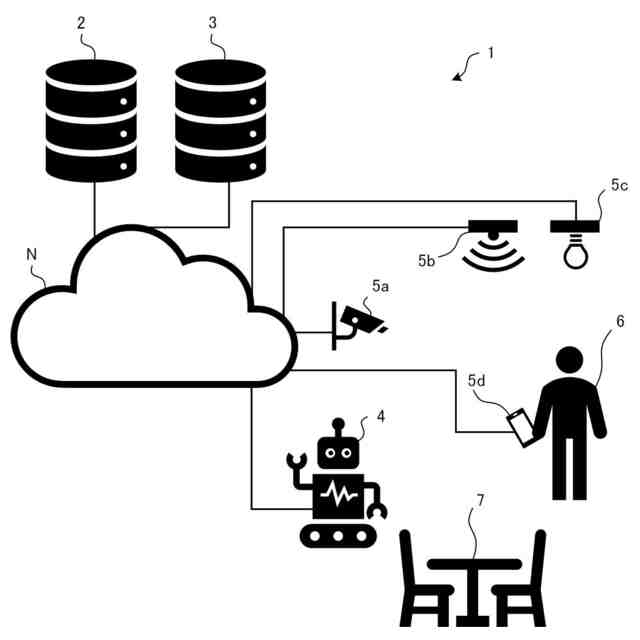
【選択図】図1
特許請求の範囲
【請求項1】
情報処理システムであって、
次の各ステップを実行する少なくとも1つ以上のプロセッサを備え、
空間受信ステップでは、現実空間情報を受け付け、
前記現実空間情報は、現実空間の構造を示す情報であり、
受信ステップでは、センシング情報を受け付け、
前記センシング情報は、前記現実空間をセンシングすることによって得られる情報であり、
空間出力ステップでは、仮想空間情報をリアルタイムで出力し、
前記仮想空間情報は、前記センシング情報が示すセンシングの結果が、前記現実空間情報が示す前記現実空間の構造に反映された仮想空間を示す情報である、
情報処理システム。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載の情報処理システムにおいて、
前記1つ以上のプロセッサは、シミュレートステップを更に実行し、
前記シミュレートステップでは、時系列に取得した前記センシング情報から、シミュレート情報を生成し、前記シミュレート情報は、前記現実空間上の変化の予測を仮想空間においてシミュレーションした情報である、
情報処理システム。
【請求項3】
請求項2に記載の情報処理システムにおいて、
前記空間出力ステップでは、エージェントに前記シミュレート情報を送信し、
前記エージェントは、前記シミュレート情報に基づいて行動する、
情報処理システム。
【請求項4】
請求項3に記載の情報処理システムにおいて、
前記センシング情報は、骨格情報を含み、前記骨格情報は、前記現実空間内に存在する人間の骨格に関する情報であり、
前記シミュレート情報は、前記現実空間上の前記人間の動きの予測を仮想空間においてシミュレーションした情報を含む、
情報処理システム。
【請求項5】
請求項4の何れか1つに記載の情報処理システムにおいて、
前記エージェントは、前記仮想空間上にのみ存在するバーチャルエージェントを含み、
前記バーチャルエージェントは、前記シミュレート情報に基づいて、前記人間の動きと協調して動作する、
情報処理システム。
【請求項6】
請求項3に記載の情報処理システムにおいて、
前記センシング情報は、前記現実空間内の各位置に対応する温度を示す温度マップ情報を含み、
前記シミュレート情報は、時系列に取得した温度マップ情報に基づいて、前記現実空間上の前記温度の変化の予測を仮想空間においてシミュレーションした情報を含み、
前記エージェントは、前記シミュレート情報に基づいて動作するロボットを含む、
情報処理システム。
【請求項7】
請求項3に記載の情報処理システムにおいて、
前記センシング情報は、前記現実空間内に存在する荷物の重さを示す重さ情報を含み、
前記エージェントは、運搬可能な荷物の重さが予め定められたロボットを含み、
前記ロボットは、前記重さ情報に基づいて運搬可能な1以上の荷物を運搬する、
情報処理システム。
【請求項8】
請求項3に記載の情報処理システムにおいて、
前記センシング情報は、前記現実空間内の区画毎の人間の密度を示す密度情報を含み、
前記シミュレート情報は、時系列に取得した密度情報に基づいて、前記現実空間上の前記人間の密度の予測を仮想空間においてシミュレーションした情報を含み、
前記エージェントは、アラームを発生可能なドローンを含み、
前記ドローンは、前記シミュレート情報に基づいて人間の密度が高くなると推定される場所に移動し、アラームを発生する、
情報処理システム。
【請求項9】
請求項3に記載の情報処理システムにおいて、
前記センシング情報は、荷物分類情報と荷物位置情報とを含み、
前記荷物分類情報は、荷物の分類を示す情報を含み、
前記荷物位置情報は、前記荷物の位置を示す情報を含み、
前記エージェントは、前記荷物分類情報と前記荷物位置情報とに基づいて、前記荷物を所定の箇所まで運搬し、
前記シミュレート情報は、時系列に取得した、前記荷物分類情報及び前記荷物位置情報に基づいて、前記所定の箇所での残りの荷物の許容量をシミュレートした情報を含む、
情報処理システム。
【請求項10】
請求項1に記載の情報処理システムにおいて、
前記空間出力ステップでは、現実空間情報から仮想空間情報を生成するように学習させた学習済みモデルを使用して、前記現実空間情報に対応する前記仮想空間情報をリアルタイムで出力する、
情報処理システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理システム、プログラム及び情報処理方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来において、デジタルツイン分析装置は、分析するためのデータの入力を受付するデータ受付部と、データ受付部により受付されたデータの精度を評価するための評価指標を格納する評価指標格納部と、評価指標格納部に格納された評価指標に基づき、受付されたデータの精度を評価するデータ評価部と、データ評価部により評価された精度に基づき選択されたデータを用いて分析を行うデータ分析部と、データ分析手段により分析された結果を出力する出力部と、を含む技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2022-183887号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、近年において、現実空間の構造を示す現実空間情報と現実空間をセンシングした情報とに基づいて仮想空間を出力するための技術が、又はセンシング情報の取得の方法の種類によらずに、センシング情報の出力先のシステムがセンシング情報を活用することが可能な技術が求められている。
【0005】
本発明では上記事情を鑑み、現実空間の構造を示す現実空間情報と現実空間をセンシングした情報とに基づいて仮想空間を出力することが可能な技術を、又は、センシング情報の取得の方法の種類によらずに、センシング情報の出力先のシステムがセンシング情報を活用することが可能な技術を提供することとした。
【課題を解決するための手段】
【0006】
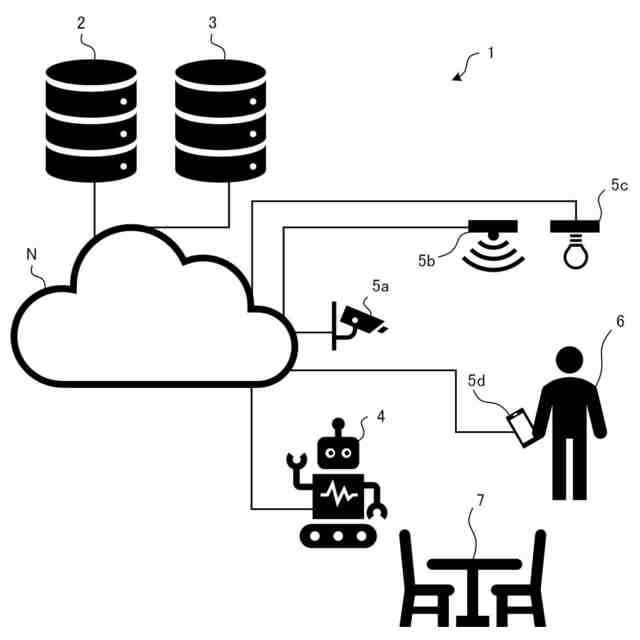
本発明の一態様によれば、情報処理システムが提供される。この情報処理システムは、次の各ステップを実行する少なくとも1つ以上のプロセッサを備える。空間受信ステップでは、現実空間情報を受け付ける。現実空間情報は、現実空間の構造を示す情報である。受信ステップでは、センシング情報を受け付ける。センシング情報は、現実空間をセンシングすることによって得られる情報である。空間出力ステップでは、仮想空間情報をリアルタイムで出力する。仮想空間情報は、センシング情報が示すセンシングの結果が、現実空間情報が示す現実空間の構造に反映された仮想空間を示す情報である。
【0007】
本開示によれば、現実空間の構造を示す現実空間情報と現実空間をセンシングした情報とに基づいて仮想空間を出力することが、又は、センシング情報の取得の方法の種類によらずに、センシング情報の出力先のシステムがセンシング情報を活用することができる。
【図面の簡単な説明】
【0008】
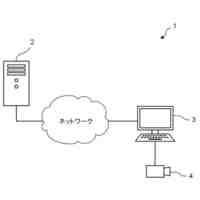
情報処理システム1のシステム構成の一例を示す図である。
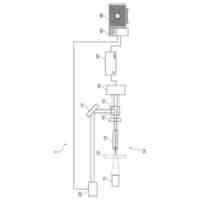
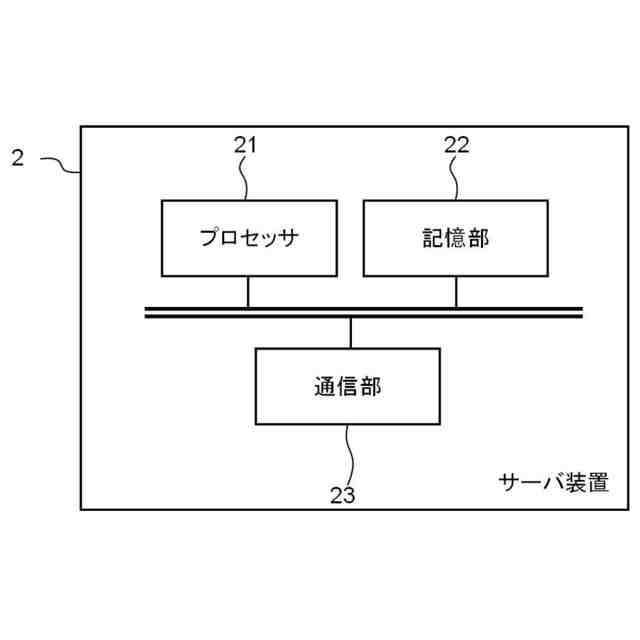
サーバ装置2のハードウェア構成の一例を示す図である。
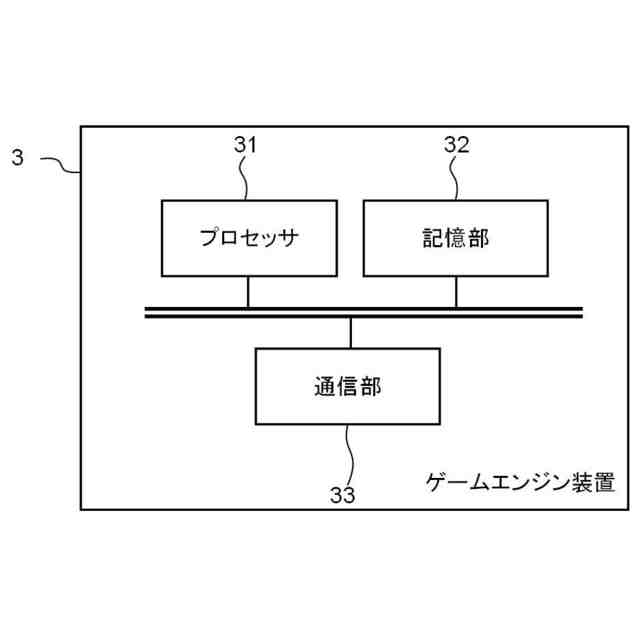
ゲームエンジン装置3のハードウェア構成の一例を示す図である。
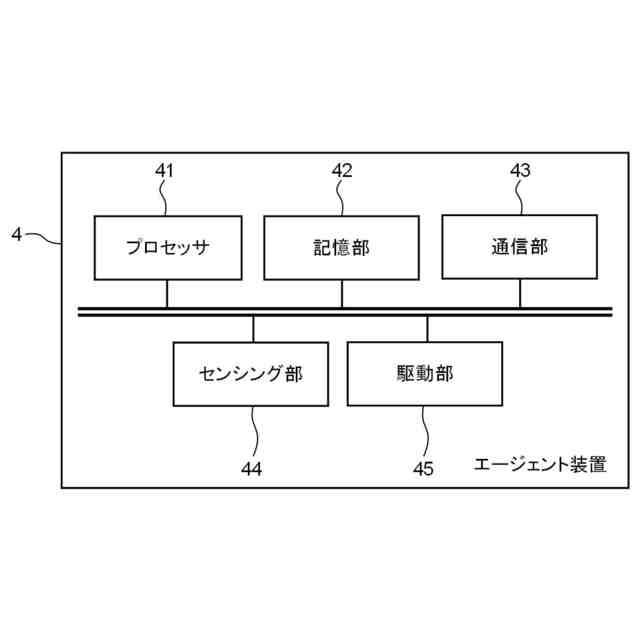
エージェント装置4のハードウェア構成の一例を示す図である。
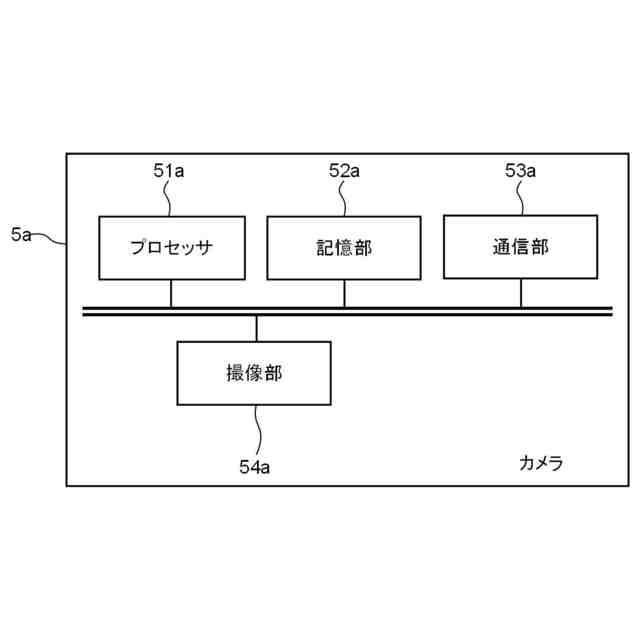
カメラ5aのハードウェア構成の一例を示す図である。
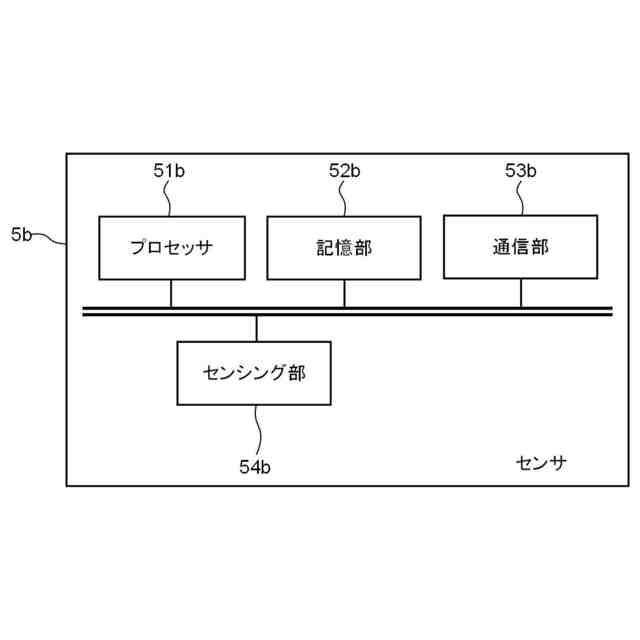
センサ5bのハードウェア構成の一例を示す図である。
照明5cのハードウェア構成の一例を示す図である。
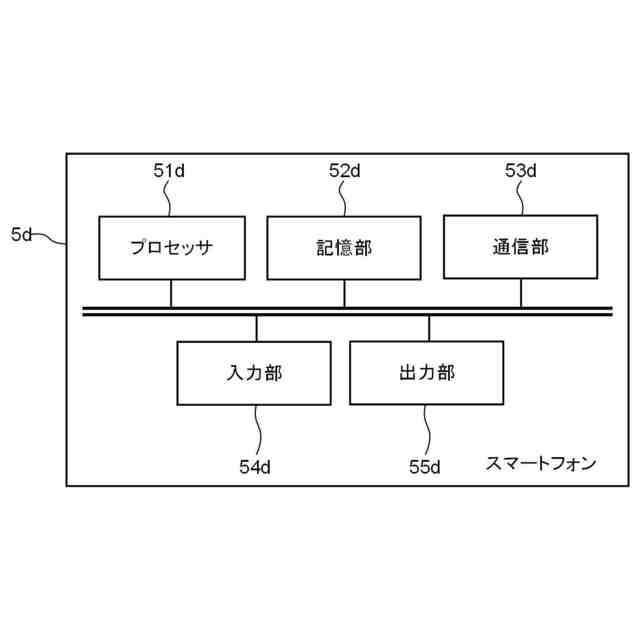
スマートフォン5dのハードウェア構成の一例を示す図である。
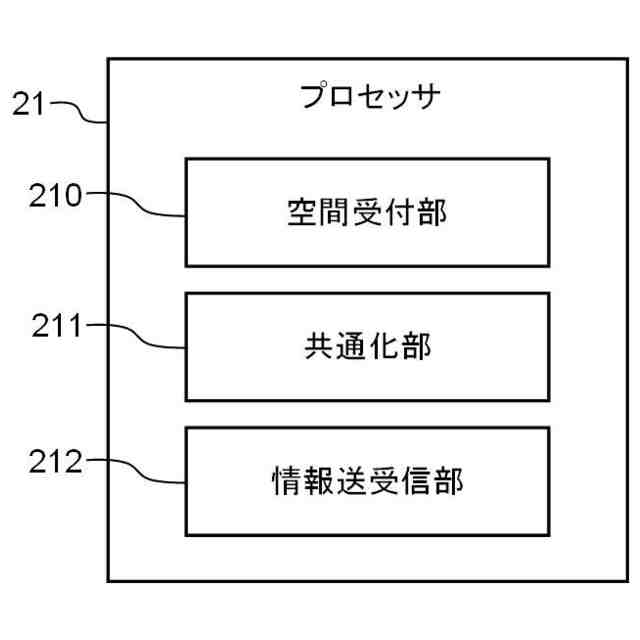
サーバ装置2のプロセッサ21によって実現される機能を示すブロック図の一例である。
ゲームエンジン装置3のプロセッサ31によって実現される機能を示すブロック図の一例である。
SSCPのアーキテクチャの一例を示す図である。
実施形態に係る情報処理を説明するためのシーケンス図の一例を示す図である。
実験場に設置されたIoT設備から取得されたデータを示す。
実験場に設置されたIoT設備から取得されたデータを示す。
実験場内の人の流れを再現したデータを示す。
実験場において車椅子が周囲の状況を認識しながら制御された例を示す。
実験場において車椅子及びロボットが周囲の状況を認識しながら制御された現実空間のデータを示す。
実験場において車椅子及びロボットが周囲の状況を認識しながら制御された現実空間のデータを示す。
人間の動きに基づいてエージェントが制御された現実空間のデータを示す図である。
人間の動きに基づいてエージェントが制御された仮想空間のデータを示す図である。
【発明を実施するための形態】
【0009】
[実施形態]
以下、図面を用いて本発明の実施形態について説明する。以下に示す実施形態中で示した各種特徴事項は、互いに組み合わせ可能である。
【0010】
1.用語の定義
まず、各用語の定義を説明する。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
国立大学法人 東京大学
微粒子分離システム
1か月前
国立大学法人 東京大学
光学装置及びレーザー
12日前
AGC株式会社
組成物
25日前
住友化学株式会社
原子力電池
1か月前
株式会社アイシン
有機酸除去方法
1か月前
国立大学法人 東京大学
皮膚微生物叢を制御するための溶菌剤
18日前
ダイキン工業株式会社
層及び構造体
28日前
国立大学法人 東京大学
肝臓オルガノイドを増殖させるための培地
1か月前
第一工業製薬株式会社
難燃性材料及び難燃性シート
1か月前
第一工業製薬株式会社
熱成形用材料及びその成形体
1か月前
富士化学株式会社
組換えタンパク質及び抗癌治療薬
25日前
国立大学法人 東京大学
光学デバイス、受信モジュール及びコヒーレント受信器
19日前
国立大学法人 東京大学
鮮明画像取得システム、鮮明画像取得方法及びプログラム
1か月前
国立大学法人 東京大学
画像生成プログラム、画像生成システム、及び画像生成方法
11日前
国立大学法人 東京大学
情報処理装置
25日前
国立大学法人 東京大学
触媒的加水素分解によるエポキシ樹脂のケミカルリサイクル法
1か月前
第一工業製薬株式会社
難燃性コーティング剤及び難燃性シート
1か月前
第一工業製薬株式会社
熱成形用繊維状材料及び熱成形用複合材料
1か月前
国立大学法人 東京大学
活性成分含有溶液処理装置および体外活性成分含有溶液循環システム
1か月前
トヨタ自動車株式会社
Sm-Fe-N系磁性材料及びその製造方法
20日前
TDK株式会社
金属錯体、イミダゾリウム塩およびアンモニア燃料電池
11日前
国立大学法人 東京大学
含フッ素オレフィンの製造方法
13日前
株式会社ブリヂストン
アクチュエータ角度推定装置、アクチュエータ角度推定方法
21日前
地方独立行政法人神奈川県立産業技術総合研究所
燃料電池システムおよび発電方法
1か月前
日本電気株式会社
眼球運動測定装置、眼球運動測定プログラム及び眼球運動測定方法
1か月前
ダイキン工業株式会社
冷凍サイクル装置
1か月前
第一三共株式会社
核酸脂質粒子ワクチン
27日前
株式会社デンソー
差動通信回路
1か月前
浜松ホトニクス株式会社
レーザ発振方法、レーザ発振システム、生成方法、生成装置、推定プログラム
11日前
シンクサイト株式会社
サイトメトリーのための方法及びシステム
20日前
京セラ株式会社
予測システム、予測装置、予測方法、制御プログラム、および記録媒体
10日前
国立大学法人大阪大学
ナノポアデバイスを用いたウイルス由来のカプシドに含まれる核酸のサイズに関連する情報の取得方法、当該取得方法に用いられるナノポアデバイスおよび取得装置
1か月前
国立大学法人 東京大学
炭酸カルシウムの製造システム、炭酸カルシウムの製造方法、炭酸ナトリウムの製造方法、酸化ケイ素含有ゲルの製造方法、コンクリート資材の処理方法、および二酸化炭素の固定化方法
11日前
個人
対話装置
1か月前
個人
情報処理装置
1か月前
個人
裁判のAI化
4日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ