TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025041158
公報種別
公開特許公報(A)
公開日
2025-03-26
出願番号
2023148279
出願日
2023-09-13
発明の名称
リニアエンコーダ
出願人
オークマ株式会社
代理人
弁理士法人YKI国際特許事務所
主分類
G01D
5/26 20060101AFI20250318BHJP(測定;試験)
要約
【課題】ガラススケールの温度を把握することができるリニアエンコーダを提供する。
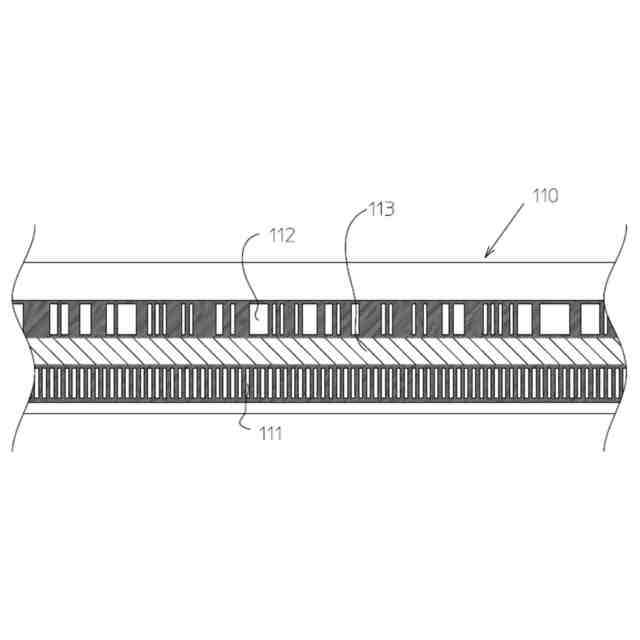
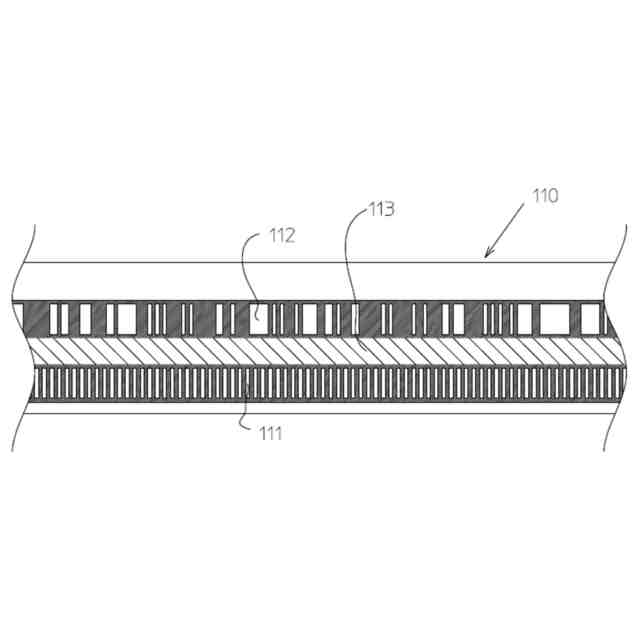
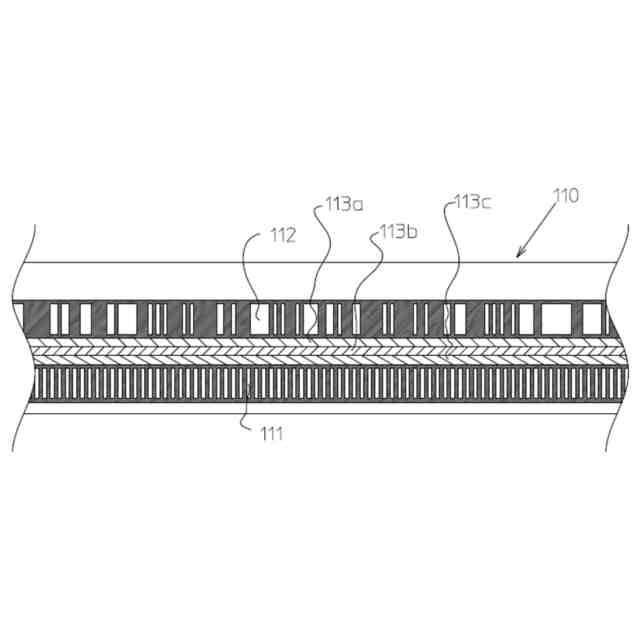
【解決手段】リニアエンコーダは、規定の測定方向に沿って複数のトラック111,112が形成されたスケール110と、前記スケール110を挟んで対向配置された発光素子および受光素子を含み、前記スケール110を透過した前記発光素子からの光を前記受光素子で受光して光源変換するセンサユニットと、を備え、前記スケール110には、さらに、サーモクロミック材からなる1以上の薄膜113が敷設されている。
【選択図】図1
特許請求の範囲
【請求項1】
規定の測定方向に沿って複数のトラックが形成されたスケールと、
前記スケールを挟んで対向配置された発光素子および受光素子を含み、前記トラックを透過した前記発光素子からの光を前記受光素子で受光して光源変換するセンサユニットと、
を備え、
前記スケールには、さらに、サーモクロミック材からなる1以上の薄膜が敷設されている、
ことを特徴とするリニアエンコーダ。
続きを表示(約 560 文字)
【請求項2】
請求項1に記載のリニアエンコーダであって、
前記1以上の薄膜は、互いに熱変色性が異なる複数の薄膜を含む、ことを特徴とするリニアエンコーダ。
【請求項3】
請求項2に記載のリニアエンコーダであって、
前記複数の薄膜は、前記測定方向と直交する方向に並んで敷設されている、ことを特徴とするリニアエンコーダ。
【請求項4】
請求項1に記載のリニアエンコーダであって、さらに、
処理回路を備え、
前記処理回路は、前記トラックを透過した光を光電変換した信号に基づいて位置情報を算出し、前記薄膜を透過した光を光電変換した信号に基づいて、前記スケールの温度情報を算出する、
ことを特徴とするリニアエンコーダ。
【請求項5】
請求項4に記載のリニアエンコーダであって、
前記処理回路は、前記位置情報と前記温度情報とを関連付けて出力する、ことを特徴とするリニアエンコーダ。
【請求項6】
請求項4または5に記載のリニアエンコーダであって、
前記処理回路は、前記温度情報に基づいて、前記スケールの線膨張量を算出し、前記膨張量に基づいて前記位置情報を補正する、ことを特徴とするリニアエンコーダ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、工作機械等に搭載されるリニアエンコーダに関し、特に、ガラス板からなるスケールを光学式に検出するリニアエンコーダに関する。
続きを表示(約 3,600 文字)
【背景技術】
【0002】
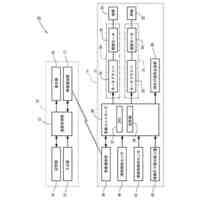
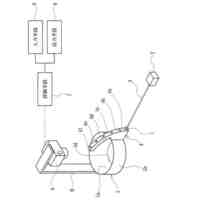
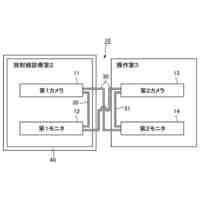
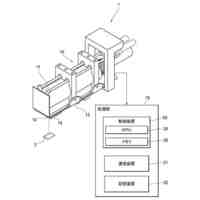
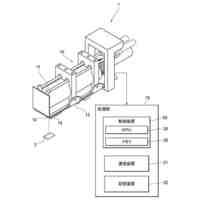
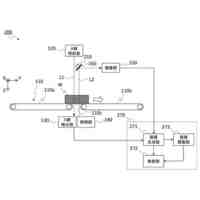
従来の工作機械に搭載されたリニアエンコーダ、及び、数値制御装置の概略構成について、図を基に説明する。図9は、従来のリニアエンコーダ、及び、数値制御装置の一例を示す概略構成図である。リニアエンコーダ901のスケールユニット901aは、制御対象たるテーブル905に固定されており、一方で、リニアエンコーダ901のセンサユニット901bは、図示しないベッドに固定されており、スケールユニット901aの位置を検出し、位置データを数値制御装置902へ出力する。ボールねじナット908は、テーブル905に固定され、非回転状態となっている。ボールねじナット908は、ボールねじ907の回転に伴って、軸方向に移動可能となっている。ボールねじ907は、その両端が図示しないタックベアリングで軸支されており、カップリング906を介して、モータ904の出力軸と連結されている。ロータリエンコーダ903は、モータ904の負荷軸側に備えられており、モータ904の回転位置を検出し、その位置データを数値制御装置902へ出力する。数値制御装置902は、ロータリエンコーダ903からの位置データと、センサユニット901bからの位置データとから、制御対象物(テーブル905)を所望の位置へ移動させるべく、モータ904へ制御電流を流し、モータ904を回転させる。
【0003】
さて、ここで、リニアエンコーダ901の存在意義について、説明したい。図9の例で、リニアエンコーダ901が設置されていなかった場合、制御対象たるテーブル905の位置は、ロータリエンコーダ903が出力する回転位置によって、間接的に制御されることとなる。間接的な位置検出となるため、テーブル905を意図した位置に制御できない。すなわち、テーブル905の重量と、図示しないテーブル905に搭載する被加工物の重量とが、図示しない案内面で発生する摩擦力を引き起こし、ひいては、ボールねじ907に捩れが発生する。この捩れは、ロータリエンコーダ903の回転位置では検出できない。結果として、テーブル905を意図した位置に制御できない。しかし、リニアエンコーダ901を搭載していれば、テーブル905の位置を直接的に検出できるため、その存在意義が発せられる。
【0004】
また、温度環境による熱変位に対しても、リニアエンコーダ901の存在意義は発せられる。ボールねじ907は、回転することにより、非回転に拘束されたボールねじナット908との間で発熱する。テーブル905と図示しないベッドとの間でも、案内面での発熱がある。テーブル905に搭載した被加工物にクーラント液をかけた加工を行っていれば、これによって冷やされることもある。空調設備を使用した雰囲気環境でも、ベッドやテーブル905が冷やされる。このような時、リニアエンコーダ901を搭載していれば、熱変位の影響を一定程度低減することができる。
【0005】
より熱変位の影響を低減すべく、テーブル905や図示しないベッドに、サーミスタ等からなる温度センサを埋設し、熱変位量を補正するような技術も広く知られている。そして、一般的に鋳物鋼材からなるテーブル905やベッドと、リニアエンコーダ901のスケールユニット901aを構成するガラス材とは、線膨張係数が異なるため、熱変位量を補正する段階で、リニアエンコーダ901からの位置データに対し、リニアエンコーダ901の線膨張係数に応じた線膨張差を加味することも行われている。
【0006】
それでも、テーブル905の温度センサと、リニアエンコーダ901のスケールユニット901a内のガラススケールとは、距離的に離れており、実際のガラススケールの温度を把握できない。また、スケールユニット901aには、外部からの防塵・防滴を目的として、圧縮空気を封入して保護していることが一般的である。この圧縮空気がスケールユニット901a内へ開放された時に、ボイルシャルル則により、気体温度が低下する。これにより、スケールユニット901a内の雰囲気温度は、外部の雰囲気温度より低くなりがちである。そのため、ガラススケールの温度は、温度センサを埋設したテーブル905の温度よりも低くなることが多い。また、圧縮空気は、スケールユニット901aの左端、或いは、右端のいずれかから導入することが一般的であり、左右いずれか圧縮空気を導入した側のガラススケールが、より低い温度に冷やされることとなる。結果として、テーブル905に埋設した温度センサにより検出する温度と、リニアエンコーダ901のスケールユニット901a内のガラススケールの温度とで、温度差があることとなり、熱変位量の補正に誤差が生じてしまう。
【0007】
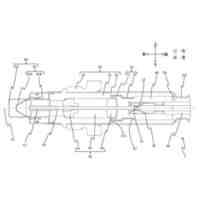
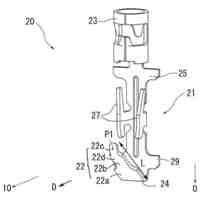
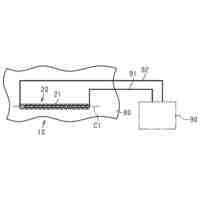
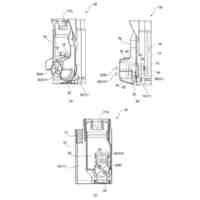
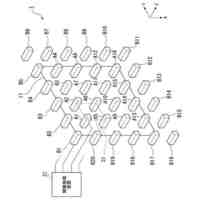
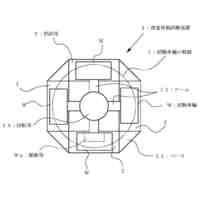
もちろん、ガラススケールに直接、温度センサを複数固定することも、理論上は可能である。図10は、従来のリニアエンコーダ901の断面の一例を示す断面図である。スケールユニット101aは、クロム薄膜よりなる格子状のパターンを敷設したガラススケール110を有している。このガラススケール110は、アルミカバー114の溝内に配置され、部分的に丸ゴム紐115で押さえ付けられている。また、ガラススケール110の長手方向の真ん中部分は、図示しない接着剤にて強固に固定されている。アルミカバー114の開口部は、リップシール116a,116bにて封止されている。センサユニット101bは、LEDからなる発光ユニット117と、フォト・ダイオードからなる受光ユニット118と、を有する。発光ユニット117および受光ユニット118は、フレーム筐体119の上部に、ガラススケール110を挟み込むように配置されている。図11に、従来のガラススケール110の正面図の一例を示す。ハッチングしたエリアは、クロムの薄膜を蒸着した遮光膜であり、それ以外のエリアは光を透過する。ガラススケール110の下側には、規則的なパターンで繰り返す微細桁トラック111が敷設されており、上側には、M系列コードによる不規則なパターンの絶対位置桁トラック112が敷設されている。
【0008】
発光ユニット117から発せられた光は、ガラススケール110のクロム遮光膜で遮られてないエリアを透過し、受光ユニット118へ到達する。微細桁トラック111を透過した光は、更に、受光ユニット118に設置した図示しないインデックススケールを透過する際にモアレ干渉縞状となり、微細桁用のフォト・ダイオードにて光電変換され、互いに直行する二相の正弦波状の電気信号となる。絶対位置桁トラック112を透過した光は、受光ユニット118に設置したフォト・ダイオードからなるイメージセンサ部にて、電気信号へ変換される。センサユニット101bのフレーム筐体の下部には、図10において図示していないが、処理回路基板が内蔵されている。この処理回路基板には、受光ユニット118からの電気信号が入力される。微細桁トラック111を透過した光に由来する二相の正弦波状の電気信号は、内挿演算処理が施される。この内挿演算処理の結果から、微細桁トラック111の1ピッチ長内の電気角が算出される。絶対位置桁トラック112を透過した光に由来する信号は、粗い絶対位置信号に変換される。この粗い絶対位置信号と前述の1ピッチ長内の電気角と結合することで、微細な絶対位置データが算出される。処理回路基板には、これらの位置データへの演算を行う演算回路の他に、数値制御装置との通信を行う通信回路なども実装されている。
【0009】
このような構造にあって、新たにサーミスタ等の温度センサをガラススケールに直接固定しようとすると、発光ユニット117のLED光源から受光ユニット118までの距離を変えなければならないなど、スペースが大変厳しいことが分かる。また、温度センサを接続するための配線材の取り回しも考慮すると、更に、スペース的に厳しくなることが分かる。
【0010】
そこで、特許文献1では、スケールに直接、温度センサを設置しなくても、ガラススケール自体の温度を把握できる技術が公開されている。しかし、特許文献1では、互いに線膨張係数の異なる2本のスケール部を用意せねばならない。スケール部は精密さも要求されることから、スケール部は、スケールユニットを構成する要素の中で最も高価な構成要素となりがちである。かかるスケール部を通常の2倍用意することは、コスト面でのマイナス要因であった。
【先行技術文献】
【特許文献】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
粒子分析装置
24日前
株式会社イシダ
計量装置
18日前
日本精機株式会社
表示装置
4日前
株式会社エビス
水準器
3日前
個人
アクセサリー型テスター
25日前
日本精機株式会社
アセンブリ
10日前
個人
準結晶の解析方法
10日前
株式会社豊田自動織機
自動走行体
9日前
株式会社ミツトヨ
画像測定機
26日前
株式会社テイエルブイ
振動検出装置
24日前
栄進化学株式会社
浸透探傷用濃縮液
1か月前
日本碍子株式会社
ガスセンサ
3日前
ダイハツ工業株式会社
試料セル
24日前
トヨタ自動車株式会社
検査装置
18日前
トヨタ自動車株式会社
電気自動車
25日前
株式会社 キョーワ
食品搬送装置
1か月前
大和製衡株式会社
計量装置
1か月前
GEE株式会社
光学特性測定装置
9日前
日本特殊陶業株式会社
ガスセンサ
1か月前
日本特殊陶業株式会社
ガスセンサ
1か月前
日本特殊陶業株式会社
ガスセンサ
10日前
大成建設株式会社
画像表示システム
1か月前
株式会社TISM
センサ部材
9日前
理研計器株式会社
ガス検出器
26日前
理研計器株式会社
ガス検出器
26日前
理研計器株式会社
ガス検出器
26日前
理研計器株式会社
ガス検出器
26日前
理研計器株式会社
ガス検出器
26日前
株式会社熊谷組
計測システム
1か月前
東ソー株式会社
簡易型液体クロマトグラフ
20日前
株式会社不二越
X線測定装置
4日前
株式会社不二越
X線測定装置
4日前
TDK株式会社
計測装置
4日前
株式会社 システムスクエア
検査装置
1か月前
リバークル株式会社
荷重移動試験装置
18日前
株式会社小糸製作所
物体検知システム
10日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ