TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025035860
公報種別
公開特許公報(A)
公開日
2025-03-14
出願番号
2023143169
出願日
2023-09-04
発明の名称
運転支援装置
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
弁理士法人プロスペック特許事務所
主分類
G08G
1/16 20060101AFI20250307BHJP(信号)
要約
【課題】特異箇所を通過しても、車体が加振される度合が低く、乗員が不快感を覚える虞を低減することができる運転支援装置を提供する。
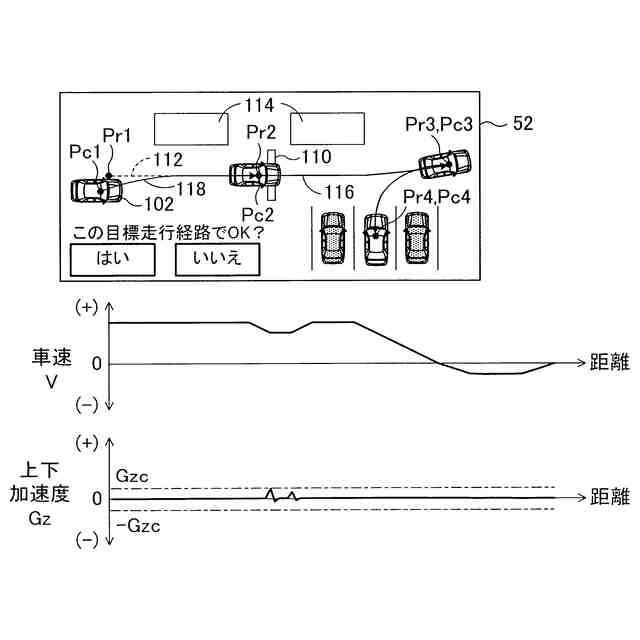
【解決手段】運転者の運転による車両102の走行経路112の情報を記憶装置に記憶し、運転者の自動走行指令があると、記憶装置に記憶されている走行経路の情報に基づいて目標走行経路116を設定し、車両が目標走行経路に沿って走行するように走行制御装置を制御して車両を自動走行させる運転支援装置であって、運転者の運転による車両の走行時に基準値Gzc以上の上下加速度Gzの大きさが検出されたときには、その位置を路面変位の特異箇所として走行経路112の情報と共に記憶装置に記憶し、自動走行時に車両が特異箇所に対応する箇所Pc2を通過する際に車速Vを低下させる。
【選択図】図5
特許請求の範囲
【請求項1】
運転者の情報取得指令に基づいて情報取得開始位置から情報取得終了位置まで運転者の運転による車両の走行経路の情報を取得する経路情報取得装置と、前記経路情報取得装置により取得された走行経路の情報を記憶する記憶装置と、車両の走行を制御する走行制御装置と、前記経路情報取得装置、前記記憶装置及び前記走行制御装置を制御する制御ユニットと、を含み、前記制御ユニットは、運転者の自動走行指令があると、前記記憶装置に記憶されている走行経路の情報に基づいて車両の現在位置から走行終了位置までの目標走行経路を設定し、前記車両が前記目標走行経路に沿って走行するように前記走行制御装置を制御して車両を自動走行させるよう構成された、運転支援装置において、
前記運転支援装置は、車両の上下加速度を検出する検出装置を含み、前記制御ユニットは、運転者の運転による車両の走行時に前記検出装置が基準値以上の上下加速度の大きさを検出したときには、当該上下加速度の大きさを検出した位置を路面変位の特異箇所として走行経路の情報と共に前記記憶装置に記憶させ、前記自動走行時に車両が前記特異箇所に対応する箇所を通過する際に車速が低下するように前記走行制御装置を制御するよう構成された、運転支援装置。
続きを表示(約 620 文字)
【請求項2】
請求項1に記載の運転支援装置において、前記基準値は、運転者の運転による車両の走行時における車速が高いほど大きくなるよう、車速に応じて可変設定される、運転支援装置。
【請求項3】
請求項1に記載の運転支援装置において、前記自動走行時に車両が前記特異箇所に対応する箇所を通過する際における車速の低下量は、前記自動走行時における車速が高いほど大きく、前記検出装置が検出した車両の上下加速度の大きさが大きいほど大きくなるよう、前記自動走行時における車速及び前記検出装置が検出した車両の上下加速度の大きさの少なくとも一方に応じて可変設定される、運転支援装置。
【請求項4】
請求項1に記載の運転支援装置において、前記制御ユニットは、前記走行開始位置が前記記憶装置に記憶された走行経路上にないときには、前記走行開始位置から前記記憶装置に記憶された走行経路へ至る合流経路を含むように前記目標走行経路を設定するよう構成された運転支援装置。
【請求項5】
請求項1に記載の運転支援装置において、前記経路情報取得装置は、GPS装置を含み、前記制御ユニットは、前記GPS装置により取得された車両の位置に基づいて少なくとも前記情報取得開始位置を特定し、前記GPS装置により取得された車両の位置の軌跡及び運転者の運転履歴の少なくとも一方に基づいて車両の走行経路を特定するよう構成された運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動車などの車両のための運転支援装置に係る。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
自動車などの車両のための運転支援装置の一つとして、運転者の運転による車両の走行経路を記録し、その後の走行時に、車両が記録された走行経路に沿って走行するように車両の走行を支援する運転支援装置が知られている。例えば、下記の特許文献1には、運転者の運転による車両の走行経路及び停止位置を記録する学習モードを有し、走行支援時には、記録された走行経路に沿って停止位置まで車両を自動走行により移動させる運転支援装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
特許06022447号明細書
【発明の概要】
【0004】
〔発明が解決しようとする課題〕
走行支援時には、車両が障害物に衝突しないよう、カメラセンサ、レーダセンサなどの周囲情報取得装置により車両の周囲の情報が取得される。周囲情報取得装置は、停止車両のような障害物を検出することはできるが、スピードバンプ、段差、溝のような路面の上下変位がある箇所(「特異箇所」という)を検出することができないことがある。
【0005】
走行支援時に車両が特異箇所を通過すると、路面から車輪を介して車体に衝撃荷重が入力され、車体が加振される。そのため、上記特許文献1に記載された運転支援装置のような従来の運転支援装置においては、車両が特異箇所を通過する際に車体が加振されることに起因して乗員が不快感を覚えることが避けられない。
【0006】
本発明は、車両が記録された走行経路に沿って自動走行する際に特異箇所を通過しても、従来に比して車体が加振される度合が低く、乗員が不快感を覚える虞を低減することができるよう改良された運転支援装置を提供する。
〔課題を解決するための手段及び発明の効果〕
【0007】
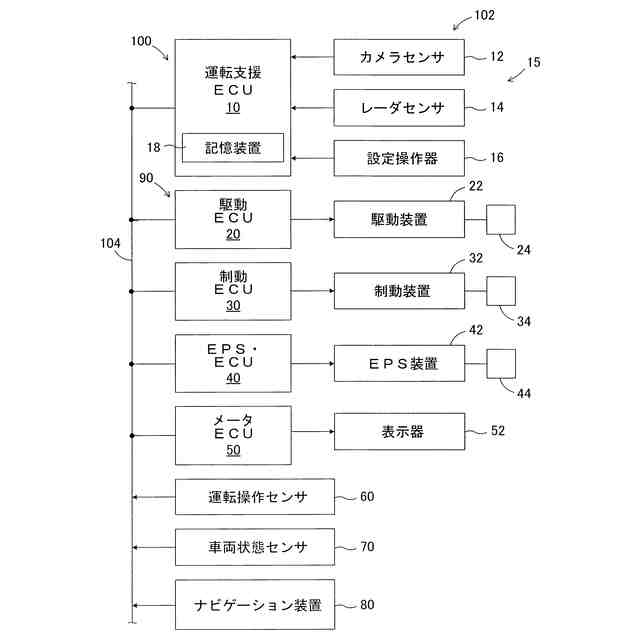
本発明によれば、運転者の情報取得指令に基づいて情報取得開始位置から情報取得終了位置まで運転者の運転による車両(102)の走行経路の情報を取得する経路情報取得装置(ナビゲーション装置80、周囲情報取得装置15)と、経路情報取得装置により取得された走行経路の情報を記憶する記憶装置(18)と、車両の走行を制御する走行制御装置(90)と、経路情報取得装置、記憶装置及び走行制御装置を制御する制御ユニット(運転支援ECU10)と、を含み、制御ユニットは、運転者の自動走行指令があると、記憶装置に記憶されている走行経路の情報に基づいて車両の現在位置から走行終了位置までの目標走行経路(116)を設定し(S140)、車両が目標走行経路に沿って走行するように走行制御装置を制御して車両を自動走行させる(S160)よう構成された運転支援装置(100)が提供される。
【0008】
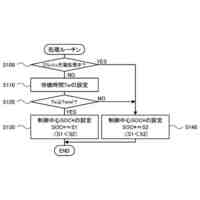
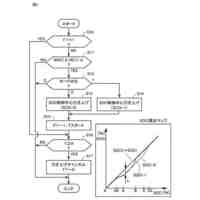
運転支援装置(100)は、車両の上下加速度を検出する検出装置(車両状態センサ70)を含み、制御ユニット(運転支援ECU10)は、運転者の運転による車両の走行時に検出装置が基準値(Gzc)以上の上下加速度(Gz)の大きさを検出したときには(S80)、当該上下加速度の大きさを検出した位置(Pr2)を路面変位の特異箇所として走行経路の情報と共に記憶装置に記憶させ(S90)、自動走行時に車両が特異箇所に対応する箇所(Pc2)を通過する際に車速(V)が低下するように走行制御装置を制御する(S190)よう構成される。
【0009】
上記の構成によれば、特異箇所があるときには、自動走行時に車両が特異箇所に対応する箇所を通過する際に車速が低下する。よって、車速が低下されない場合に比して、車両が特異箇所に対応する箇所を通過する際に路面から車輪を介して車体に入力される衝撃荷重が低減され、車体の加振の度合が低減される。従って、車体が加振されることに起因して乗員が不快感を覚える虞を従来に比して低減することができる。
〔発明の態様〕
【0010】
本発明の一つの態様においては、基準値(Gzc)は、運転者の運転による車両の走行時における車速(V)が高いほど大きくなるよう、車速に応じて可変設定される(S80)。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
方法
21日前
トヨタ自動車株式会社
方法
14日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
方法
21日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
電池
15日前
トヨタ自動車株式会社
自動車
14日前
トヨタ自動車株式会社
ロータ
今日
トヨタ自動車株式会社
ロータ
今日
トヨタ自動車株式会社
電動車
7日前
トヨタ自動車株式会社
ロータ
2日前
トヨタ自動車株式会社
リレー
今日
トヨタ自動車株式会社
燃焼器
2日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
電動車
8日前
トヨタ自動車株式会社
サーバ
7日前
トヨタ自動車株式会社
ロータ
2日前
トヨタ自動車株式会社
駆動装置
2日前
トヨタ自動車株式会社
充電施設
今日
トヨタ自動車株式会社
触媒装置
14日前
トヨタ自動車株式会社
電動車両
2日前
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
システム
7日前
トヨタ自動車株式会社
蓄電セル
1日前
トヨタ自動車株式会社
蓄電セル
1日前
トヨタ自動車株式会社
蓄電セル
1日前
トヨタ自動車株式会社
成膜装置
7日前
トヨタ自動車株式会社
蓄電セル
2日前
トヨタ自動車株式会社
射出装置
7日前
トヨタ自動車株式会社
蓄電セル
今日
トヨタ自動車株式会社
内燃機関
7日前
トヨタ自動車株式会社
駆動装置
7日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
接着方法
14日前
トヨタ自動車株式会社
制御装置
今日
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ