TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025023699
公報種別
公開特許公報(A)
公開日
2025-02-17
出願番号
2023128055
出願日
2023-08-04
発明の名称
軸受異常の原因推定方法及び装置
出願人
オークマ株式会社
代理人
個人
,
個人
主分類
G01M
13/045 20190101AFI20250207BHJP(測定;試験)
要約
【課題】振動による軸受状態の診断のための測定と併せて、軸受状態の変化が発生した異常原因の推定を行う。
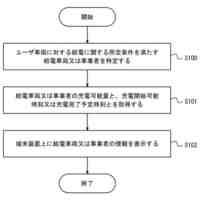
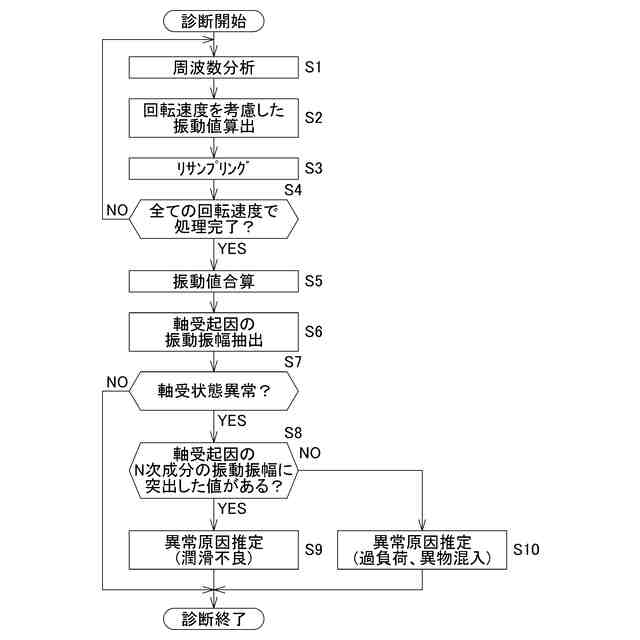
【解決手段】主軸の振動を測定する測定ステップと、得られる振動から周波数に対する振動の大きさを算出する分析ステップS1と、周波数分析結果から回転周波数に対する周波数の比が同一な振動の大きさについて回転速度の影響を除き、振動平均値を算出する振動平均値算出ステップS2~S5と、振動平均値のうち、軸受に起因する振動が生じる周波数の整数倍の回転周波数に対する比である特徴比周波数における軸受起因振動値を抽出する軸受起因振動値抽出ステップS6と、軸受起因振動値に基づいて異常の有無を判断する異常判断ステップS7と、軸受の異常が判断された際に、軸受に起因する振動が生じる特徴比周波数の整数倍における軸受起因振動値の関係に基づいて、異常発生原因を推定する異常発生原因推定ステップS8~S10とを実行する。
【選択図】図2
特許請求の範囲
【請求項1】
回転体を支持する軸受に異常が発生した場合の軸受異常の原因を推定する方法であって、
前記回転体を一定速度で回転させたときの振動を複数の回転速度において測定する測定ステップと、
前記測定ステップで得られる振動から周波数分析により周波数に対する振動の大きさを算出する分析ステップと、
複数の回転速度において前記分析ステップで得られた周波数分析結果から、回転周波数に対する周波数の比が同一な前記振動の大きさについて回転速度の影響を除き、平均をとった振動平均値を算出する振動平均値算出ステップと、
前記振動平均値のうち、前記軸受に起因する振動が生じる周波数の整数倍の回転周波数に対する比である特徴比周波数における軸受起因振動値を抽出する軸受起因振動値抽出ステップと、
前記軸受起因振動値に基づいて異常の有無を判断する異常判断ステップと、
前記異常判断ステップにおいて異常と判断された際に、前記軸受に起因する振動が生じる特徴比周波数の整数倍における前記軸受起因振動値の関係に基づいて、異常発生原因を推定する異常発生原因推定ステップと、
を実行することを特徴とする軸受異常の原因推定方法。
続きを表示(約 930 文字)
【請求項2】
前記異常発生原因推定ステップでは、前記軸受に起因する振動が生じる特徴比周波数の整数倍における前記軸受起因振動値において、
一つの整数倍の特徴比周波数の軸受起因振動値のみが大である場合に、異常原因が潤滑不良であると推定し、
一つの整数倍の特徴比周波数の軸受起因振動値のみが大でない場合に、異常原因が過負荷または異物混入であると推定することを特徴とする請求項1に記載の軸受異常の原因推定方法。
【請求項3】
回転体を支持する軸受に異常が発生した場合の軸受異常の原因を推定する装置であって、
前記回転体を一定速度で回転させたときの振動を複数の回転速度において測定する測定部と、
前記測定部で得られる振動から周波数分析により周波数に対する振動の大きさを算出する分析部と、
複数の回転速度において前記分析部で得られた周波数分析結果から、回転周波数に対する周波数の比が同一な前記振動の大きさについて回転速度の影響を除き、平均をとった振動平均値を算出する振動平均値算出部と、
前記振動平均値のうち、前記軸受に起因する振動が生じる周波数の整数倍の回転周波数に対する比である特徴比周波数における軸受起因振動値を抽出する軸受起因振動値抽出部と、
前記軸受起因振動値に基づいて異常の有無を判断する異常判断部と、
前記異常判断部において異常と判断された際に、前記軸受に起因する振動が生じる特徴比周波数の整数倍における前記軸受起因振動値の関係に基づいて、異常発生原因を推定する異常発生原因推定部と、
を備えることを特徴とする軸受異常の原因推定装置。
【請求項4】
前記異常発生原因推定部では、前記軸受に起因する振動が生じる特徴比周波数の整数倍における前記軸受起因振動値において、
一つの整数倍の特徴比周波数の軸受起因振動値のみが大である場合に、異常原因が潤滑不良であると推定し、
一つの整数倍の特徴比周波数の軸受起因振動値のみが大でない場合に、異常原因が過負荷または異物混入であると推定することを特徴とする請求項3に記載の軸受異常の原因推定装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、振動データにより検知した軸受異常に基づいて、軸受異常が発生した原因を推定する軸受異常の原因推定方法及び装置に関する。
続きを表示(約 3,800 文字)
【背景技術】
【0002】
主軸に取り付けた工具又はワークを回転させながらワークの加工を行う工作機械では、経年劣化により軸受が摩耗して予圧抜けが発生したり、異物の混入、潤滑不良などにより損傷が発生したりして、動作精度の低下や動作時の異音などの不具合を引き起こす場合がある。このような状態となると、加工物の形状不良や加工面性状不良といった加工不良が生じ、生産に悪影響を与える。また、主軸の焼き付きといった故障が発生すると、主軸が回転不能となり、工作機械を稼働させることすらできなくなる場合もある。
回転体を支持する転がり軸受に内輪の損傷などの異常が生じると振動が発生する。これを利用して軸受状態を診断するために、振動センサを活用した方法が知られている。特許文献1では、振動を測定してエンベロープ処理および周波数分析し、所定の関係式に基づいて算出した内輪、外輪、転動体のそれぞれの特徴周波数の値を抽出して、内輪、外輪、転動体でそれぞれ異なるしきい値を用いて診断する手法が示されている。
特許文献2では、複数の回転周波数において振動を測定し、回転周波数に対する周波数の比が同一な振動の大きさについて平均をとった値に基づいて診断する手法が示されている。
特許文献3では、正常なグリースと油分率の異なるグリースが封入された転がり軸受の振動データの特徴を学習した分類器を用いて、監視中に測定された振動データについて、潤滑不良状態と軸受損傷状態とに分類し診断する手法が示されている。
【先行技術文献】
【特許文献】
【0003】
特許第5146008号公報
特許第6511573号公報
特許第6997054号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1,2により、軸受焼付きといった主軸が回転不能となる重大な故障の前に修理を行うことが可能となった一方、修理時の保険適用といった費用負担先の決定や、再発対策のために、軸受異常が発生した故障原因の診断が求められるようになってきている。
故障原因としては、衝突や切削中の工具損傷などによる過負荷、潤滑油の管理不良による異物の混入や潤滑不良など様々な原因が考えられ、確認すべき項目は多岐にわたる。特に生産に関わる機械の異常の場合、復旧することが優先され、十分な調査を行うことが難しく、故障原因の追究が行えない場合がある。
また、特許文献3において診断する異常として挙げられているグリースの潤滑不良も故障原因の一つであるが、オイルエア潤滑の場合の潤滑不良による軸受の状態の変化は速く推移する。そのため、診断を行った時点で軸受損傷が発生している場合もある。
【0005】
そこで、本開示は、軸受状態の診断のための測定と併せて、軸受状態の変化が発生した異常原因の推定を行うことができる軸受異常の原因推定方法及び装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本開示の第1の構成は、回転体を支持する軸受に異常が発生した場合の軸受異常の原因を推定する方法であって、
前記回転体を一定速度で回転させたときの振動を複数の回転速度において測定する測定ステップと、
前記測定ステップで得られる振動から周波数分析により周波数に対する振動の大きさを算出する分析ステップと、
複数の回転速度において前記分析ステップで得られた周波数分析結果から、回転周波数に対する周波数の比が同一な前記振動の大きさについて回転速度の影響を除き、平均をとった振動平均値を算出する振動平均値算出ステップと、
前記振動平均値のうち、前記軸受に起因する振動が生じる周波数の整数倍の回転周波数に対する比である特徴比周波数における軸受起因振動値を抽出する軸受起因振動値抽出ステップと、
前記軸受起因振動値に基づいて異常の有無を判断する異常判断ステップと、
前記異常判断ステップにおいて異常と判断された際に、前記軸受に起因する振動が生じる特徴比周波数の整数倍における前記軸受起因振動値の関係に基づいて、異常発生原因を推定する異常発生原因推定ステップと、を実行することを特徴とする。
第1の構成の別の態様は、上記構成において、前記異常発生原因推定ステップでは、前記軸受に起因する振動が生じる特徴比周波数の整数倍における前記軸受起因振動値において、
一つの整数倍の特徴比周波数の軸受起因振動値のみが大である場合に、異常原因が潤滑不良であると推定し、
一つの整数倍の特徴比周波数の軸受起因振動値のみが大でない場合に、異常原因が過負荷または異物混入であると推定することを特徴とする。
上記目的を達成するために、本開示の第2の構成は、回転体を支持する軸受に異常が発生した場合の軸受異常の原因を推定する装置であって、
前記回転体を一定速度で回転させたときの振動を複数の回転速度において測定する測定部と、
前記測定部で得られる振動から周波数分析により周波数に対する振動の大きさを算出する分析部と、
複数の回転速度において前記分析部で得られた周波数分析結果から、回転周波数に対する周波数の比が同一な前記振動の大きさについて回転速度の影響を除き、平均をとった振動平均値を算出する振動平均値算出部と、
前記振動平均値のうち、前記軸受に起因する振動が生じる周波数の整数倍の回転周波数に対する比である特徴比周波数における軸受起因振動値を抽出する軸受起因振動値抽出部と、
前記軸受起因振動値に基づいて異常の有無を判断する異常判断部と、
前記異常判断部において異常と判断された際に、前記軸受に起因する振動が生じる特徴比周波数の整数倍における前記軸受起因振動値の関係に基づいて、異常発生原因を推定する異常発生原因推定部と、を備えることを特徴とする。
第2の構成の別の態様は、上記構成において、前記異常発生原因推定部では、前記軸受に起因する振動が生じる特徴比周波数の整数倍における前記軸受起因振動値において、
一つの整数倍の特徴比周波数の軸受起因振動値のみが大である場合に、異常原因が潤滑不良であると推定し、
一つの整数倍の特徴比周波数の軸受起因振動値のみが大でない場合に、異常原因が過負荷または異物混入であると推定することを特徴とする。
【発明の効果】
【0007】
本開示によれば、軸受状態の診断のための測定と併せて、軸受状態の変化が発生した異常原因の推定を行うことが可能となる。
【図面の簡単な説明】
【0008】
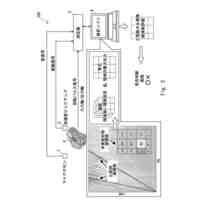
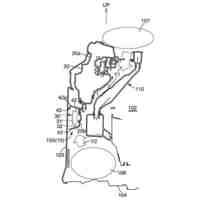
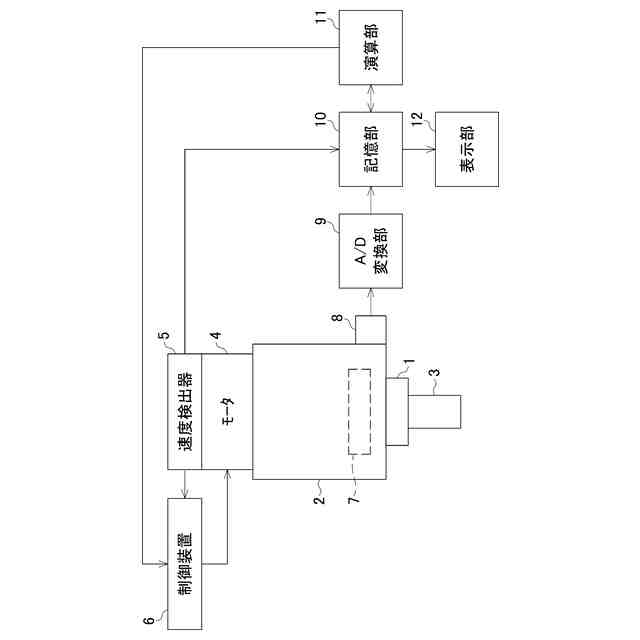
軸受異常の原因推定装置を工作機械の主軸に対して適用した構成を示したブロック図である。
軸受異常の原因推定方法のフローチャートである。
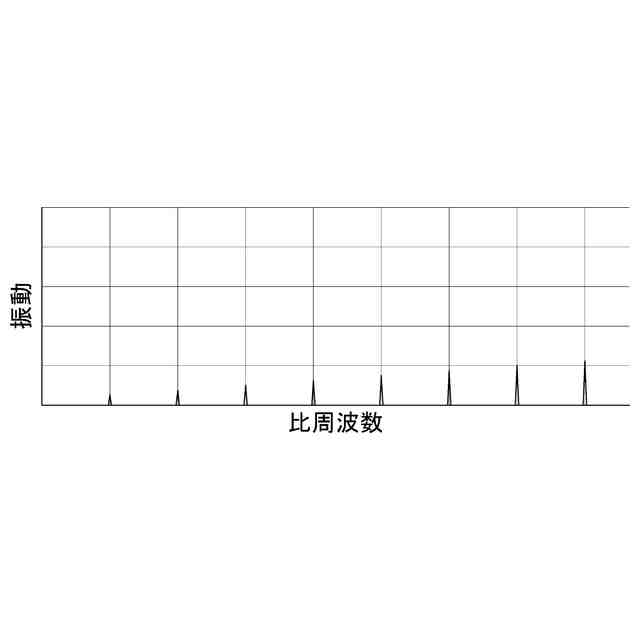
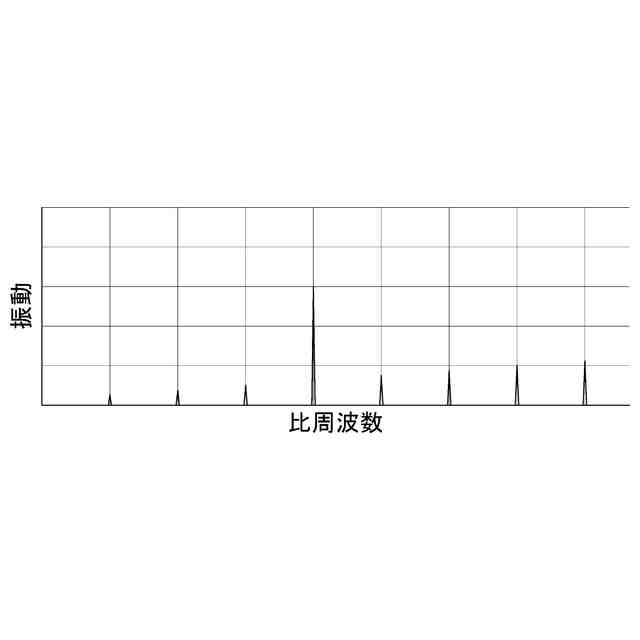
突出したN次成分を持たない振動波形の例を示すグラフである。
突出したN次成分を持つ振動波形の例を示すグラフである。
【発明を実施するための形態】
【0009】
以下、本開示の実施の形態を図面に基づいて説明する。
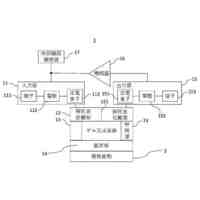
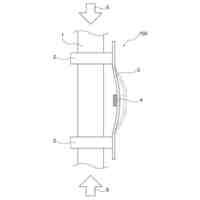
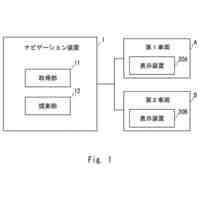
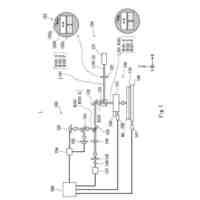
図1は、本開示の第2の構成に係る軸受異常の原因推定装置を工作機械の主軸に対して適用した構成を示すブロック図である。
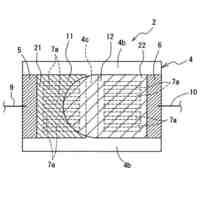
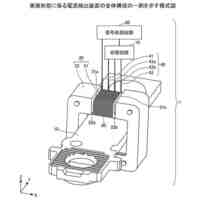
主軸1は、転がり軸受である軸受7を介して主軸ハウジング2に対して回転可能に取り付けられており、加工を行うための工具3が固定されている。モータ4は主軸1を駆動する。モータ4には速度検出器5が設けられて、測定されたモータ4の回転速度が制御装置6に入力されるようになっている。制御装置6は、加工時には、速度検出器5で測定されたモータ4の回転速度を指令回転速度に保つようにモータ4へ供給する電流の制御を行っている。
【0010】
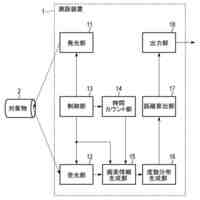
主軸ハウジング2には、振動測定手段としての振動センサ8が取り付けられ、振動センサ8により複数の回転速度での振動加速度が測定される。測定された振動加速度は、A/D変換部9でデジタル値に変換され、振動測定時の回転速度とともに記憶部10に記憶される。記憶部10は、予め設定するしきい値も記憶する。演算部11は、CPUを含んで構成され、記憶部10に記憶された軸受諸元と、測定で記憶部10に記録された回転速度及び振動加速度とから軸受7の異常度合いを算出し、正常か否かを判断する。また、演算部11は、軸受7が正常でないと判断した場合は、軸受状態が変化した原因について推測する。表示部12は演算部11による診断結果を表示する。
振動センサ8、A/D変換部9、記憶部10、演算部11、表示部12は、本開示の異常原因推定装置の一例である。
振動センサ8及びA/D変換部9は、本開示の測定部の一例である。
演算部11は、本開示の分析部、振動平均値算出部、異常判断部、異常発生原因推定部の一例である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
東レ株式会社
液体展開用シート
8日前
ユニパルス株式会社
ロードセル
15日前
株式会社トプコン
植物センサ
4日前
アズビル株式会社
湿度センサ
1日前
株式会社東芝
センサ
今日
キヤノン電子株式会社
サーボ加速度計
8日前
株式会社小野測器
回転計測装置
今日
株式会社クボタ
作業車両
7日前
株式会社ミツトヨ
変位測定装置
今日
キヤノン電子株式会社
サーボ加速度計
8日前
キヤノン電子株式会社
サーボ加速度計
8日前
トヨタ自動車株式会社
異音解析方法
今日
トヨタ自動車株式会社
NVH解析装置
今日
株式会社大真空
センサ及びその製造方法
15日前
キヤノン株式会社
撮像装置
今日
矢崎総業株式会社
サーミスタ
8日前
三菱電機株式会社
振動センサ
4日前
株式会社トーキン
電流センサ
7日前
株式会社デンソー
電圧検出回路
7日前
株式会社ミツトヨ
画像測定機及びプログラム
7日前
株式会社デンソー
電圧検出回路
7日前
三菱電機株式会社
信号処理器及びレーダ装置
7日前
国立大学法人東京科学大学
サンプル測定装置
1日前
トヨタ自動車株式会社
レーダ取付構造
今日
オムロン株式会社
プローブピン
4日前
株式会社日本マイクロニクス
プローブ
15日前
株式会社日本マイクロニクス
プローブ
15日前
トヨタ自動車株式会社
充電施設提示システム
15日前
岡谷精立工業株式会社
ひずみ測定装置
16日前
トヨタ自動車株式会社
走行経路提示システム
15日前
トヨタ自動車株式会社
方法
今日
株式会社JVCケンウッド
ナビゲーション装置
14日前
レーザーテック株式会社
検査方法及び検査装置
7日前
富士電機機器制御株式会社
電流検出装置
今日
富士電機機器制御株式会社
電流検出装置
今日
キヤノン株式会社
測距装置
1日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ