TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025022362
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2023126841
出願日
2023-08-03
発明の名称
検査方法及び検査装置
出願人
レーザーテック株式会社
代理人
個人
主分類
G01N
21/956 20060101AFI20250206BHJP(測定;試験)
要約
【課題】検査精度及びスループットを向上させることができる検査方法及び検査装置を提供する。
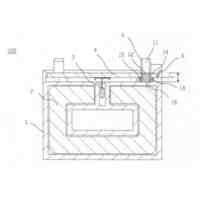
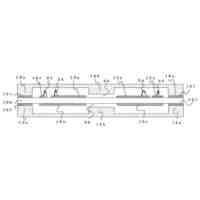
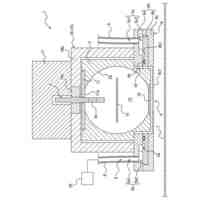
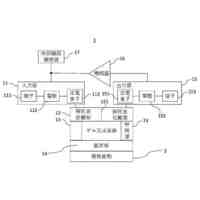
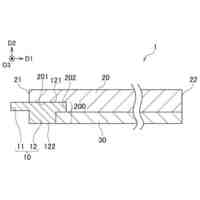
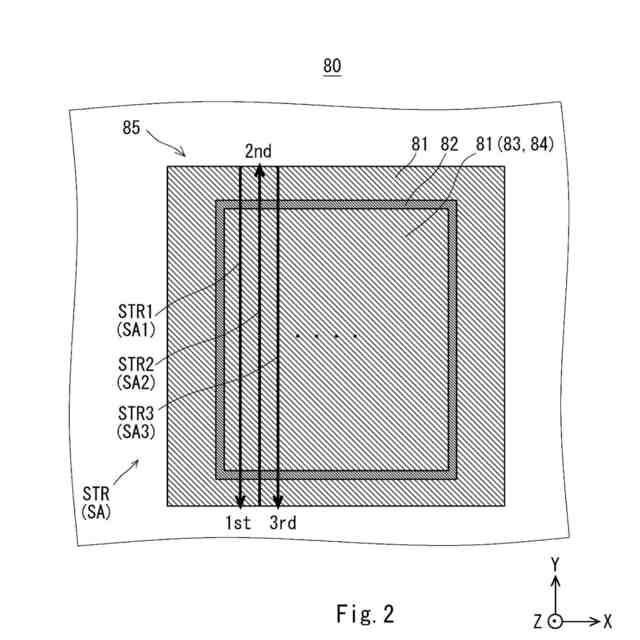
【解決手段】本実施形態に係る検査方法は、試料80上の検査領域85において、ストライプ領域SAを、オートフォーカス領域AF及びフォーカス外領域NFに区分する区分ステップと、試料80の撮像位置を走査させるときに、オートフォーカス領域AFでは、フォーカス合わせ処理を行わせ、フォーカス外領域NFでは、フォーカス合わせ処理を制限させて走査させる走査ステップと、を備え、特定ストライプ領域SA1におけるフォーカス情報を取得するフォーカス情報取得ステップと、取得したフォーカス情報に基づいて、フォーカス外領域NFの移動軌道を生成する軌道生成ステップと、をさらに備え、走査ステップは、移動軌道に基づいて、対物レンズ131の位置を移動させることにより、当該移動軌道で定まる位置からのフォーカス合わせ処理を制限させる。
【選択図】図1
特許請求の範囲
【請求項1】
試料上の一方向に延びた複数のストライプ領域を含む検査領域において、前記ストライプ領域を、オートフォーカス領域及びフォーカス外領域に区分する区分ステップと、
前記試料に対向した対物レンズを含む撮像部が撮像する前記試料の撮像位置を前記ストライプ領域に沿って走査させるときに、前記オートフォーカス領域では、前記対物レンズのフォーカス状態を検出するフォーカス部から出力されたフォーカス状態情報に基づいて、前記対物レンズの光軸方向に沿った前記対物レンズと前記試料との相対位置を変えることによってフォーカスを合わせるフォーカス合わせ処理を行わせ、前記フォーカス外領域では、前記フォーカス合わせ処理を制限させて走査させる走査ステップと、
を備える検査方法であって、
前記複数のストライプ領域のうち、特定ストライプ領域における少なくとも前記フォーカス外領域を挟む2つの前記オートフォーカス領域を前記撮像位置が走査して、前記フォーカス合わせ処理を行うことにより、前記試料にフォーカスする前記対物レンズの位置情報を含むフォーカス情報を取得するフォーカス情報取得ステップと、
前記フォーカス情報取得ステップにおいて取得した前記フォーカス情報に基づいて、前記特定ストライプ領域における前記フォーカス外領域の移動軌道を生成する軌道生成ステップと、
をさらに備え、
前記走査ステップでは、前記ストライプ領域における前記フォーカス外領域において、前記軌道生成ステップにおいて生成された前記移動軌道に基づいて、前記対物レンズの位置を前記対物レンズの光軸方向に変化させ、当該移動軌道で定まる位置からの前記フォーカス合わせ処理を制限させる、
検査方法。
続きを表示(約 2,800 文字)
【請求項2】
前記フォーカス情報取得ステップは、
前記特定ストライプ領域を前記撮像位置が走査して、前記フォーカス合わせ処理を行うことにより、前記特定ストライプ領域の前記フォーカス情報を取得し、
前記区分ステップは、
前記フォーカス情報取得ステップで取得した前記特定ストライプ領域の前記フォーカス情報に基づいて、前記特定ストライプ領域を前記オートフォーカス領域及び前記フォーカス外領域に区分する、
請求項1に記載の検査方法。
【請求項3】
前記軌道生成ステップは、
前記フォーカス情報取得ステップにおいて取得した前記フォーカス外領域を挟む2つの前記オートフォーカス領域の前記フォーカス情報に対して、補間データ処理を行うことによって、前記特定ストライプ領域における前記フォーカス外領域の前記移動軌道を生成する、
請求項1に記載の検査方法。
【請求項4】
前記区分ステップは、
特定ストライプと隣接する隣接ストライプに沿った隣接ストライプ領域を、前記特定ストライプ領域に対する区分に対応させて前記オートフォーカス領域及び前記フォーカス外領域に区分し、
前記走査ステップは、
前記隣接ストライプ領域における前記フォーカス外領域を、前記軌道生成ステップにおいて生成された前記特定ストライプ領域における前記フォーカス外領域の前記移動軌道に基づいて、前記一方向における前記特定ストライプ領域の走査と逆向きに走査しつつ、前記フォーカス合わせ処理を制限させる、
請求項1に記載の検査方法。
【請求項5】
前記区分ステップは、
前記特定ストライプと隣接せず且つ前記隣接ストライプと隣接する第3ストライプに沿った第3ストライプ領域を、前記特定ストライプ領域に対する区分に対応させて前記オートフォーカス領域及び前記フォーカス外領域に区分し、
前記軌道生成ステップは、
前記隣接ストライプ領域に対する前記走査ステップにおいて取得した前記フォーカス情報であって、前記隣接ストライプ領域における前記フォーカス外領域を挟む2つの前記オートフォーカス領域の前記フォーカス情報に基づいて、前記隣接ストライプ領域における前記フォーカス外領域の前記移動軌道を生成させ、
前記走査ステップは、
前記第3ストライプ領域における前記フォーカス外領域を、前記隣接ストライプに対して生成された前記移動軌道に基づいて走査しつつ、前記フォーカス合わせ処理を制限させる、
請求項4に記載の検査方法。
【請求項6】
前記区分ステップは、
特定ストライプ領域以外の前記ストライプ領域を、特定ストライプ領域に対する区分に対応させて前記オートフォーカス領域及び前記フォーカス外領域に区分し、
前記走査ステップは、
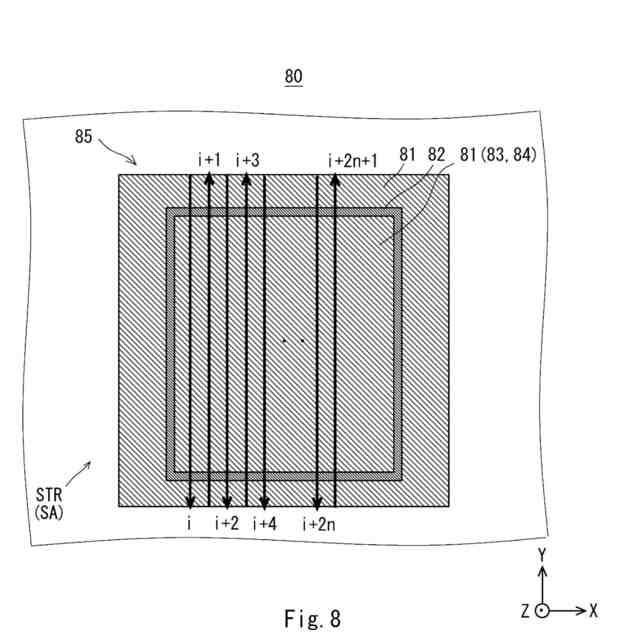
特定ストライプをi番目のストライプとしたときに、(i+2n)番目の前記ストライプに沿った前記ストライプ領域を前記一方向における前記特定ストライプ領域の走査と同じ向きに走査し、(i+2n+1)番目の前記ストライプに沿った前記ストライプ領域を前記一方向における前記特定ストライプ領域の走査と逆向きに走査し、
かつ、
前記(i+2n)番目の前記ストライプ領域における前記フォーカス外領域を、前記軌道生成ステップにおいて生成された前記特定ストライプ領域における前記フォーカス外領域の前記移動軌道に基づいて、前記同じ向きに走査しつつ、前記フォーカス合わせ処理を制限させ、
前記(i+2n+1)番目の前記ストライプ領域における前記フォーカス外領域を、前記軌道生成ステップにおいて生成された前記特定ストライプ領域における前記フォーカス外領域の前記移動軌道に基づいて、前記逆向きに走査しつつ、前記フォーカス合わせ処理を制限させる、
請求項1に記載の検査方法。
【請求項7】
前記フォーカス情報は、前記試料にフォーカスする前記撮像位置における輝度を含む、
請求項1に記載の検査方法。
【請求項8】
前記フォーカス合わせ処理は、
前記対物レンズの光軸方向に沿った前記対物レンズと前記試料との相対位置の変化量を前記試料の振動に起因する所定範囲内に留める補助フォーカス合わせ処理と、前記変化量を前記所定範囲に留めない本フォーカス合わせ処理とを含み、
前記走査ステップは、前記ストライプ領域における前記フォーカス外領域において、少なくとも前記本フォーカス合わせ処理を禁止することによって、前記移動軌道で定まる位置からの前記フォーカス合わせ処理を制限する、
請求項1に記載の検査方法。
【請求項9】
前記フォーカス外領域の種別を判定する判定ステップを備え、
前記走査ステップは、前記ストライプ領域における前記フォーカス外領域において、
当該フォーカス外領域の前記種別が所定の第1種別である場合には、前記補助フォーカス合わせ処理を禁止し、且つ、前記本フォーカス合わせ処理を禁止することによって、前記移動軌道で定まる位置からの前記フォーカス合わせ処理を制限し、
当該フォーカス外領域の種別が前記第1種別ではない場合には、前記補助フォーカス合わせ処理を許容し、且つ、前記本フォーカス合わせ処理を禁止することによって、前記移動軌道で定まる位置からの前記フォーカス合わせ処理を制限する、
請求項8に記載の検査方法。
【請求項10】
前記判定ステップは、
前記フォーカス外領域が、前記試料上に形成された複数のダイを囲む溝状のブラックボーダー、及び、前記試料上に形成された前記ダイと前記ダイとの間のスクライブを含む場合に、前記ブラックボーダーを前記第1種別と判定し、前記スクライブを前記第1種別と異なる所定の前記種別と判定し、
前記フォーカス外領域が、前記ブラックボーダー、及び、前記試料上に形成された実際の位置の変化よりも大きい位置の変化を示す特異部を含む場合に、前記ブラックボーダーを前記第1種別と判定し、前記特異部を前記第1種別と異なる前記所定の前記種別と判定し、
前記フォーカス外領域が、前記ブラックボーダー、前記スクライブ、及び、前記特異部を含む場合に、前記ブラックボーダーを前記第1種別と判定し、前記スクライブ、及び、前記特異部の少なくともいずれかを前記第1種別と異なる前記所定の前記種別と判定する、
請求項9に記載の検査方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、検査方法及び検査装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1には、検査対象となるフォトマスク等の試料の検査面の属性に応じて、フォーカス合わせを行う領域とフォーカス合わせを行わない領域とを区分し、フォーカス合わせを行う領域に対してフォーカス合わせを行う技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2012-078164号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、フォーカス合わせを行わない領域を移動する際の移動軌道によっては、フォーカス合わせを行わない領域からフォーカス合わせを行うべき領域に切り替わったときに、円滑にフォーカス追従ができない場合があり得る。よって、フォーカス合わせを行わない領域の移動軌道を適切に決定することが検査精度とスループットとの両立に当たり重要である。
【0005】
本開示は、このような問題点を鑑みてなされたものであり、検査精度及びスループットを向上させることができる検査方法及び検査装置を提供するものである。
【課題を解決するための手段】
【0006】
本実施形態の一態様にかかる検査方法は、試料上の一方向に延びた複数のストライプ領域を含む検査領域において、前記ストライプ領域を、オートフォーカス領域及びフォーカス外領域に区分する区分ステップと、前記試料に対向した対物レンズを含む撮像部が撮像する前記試料の撮像位置を前記ストライプ領域に沿って走査させるときに、前記オートフォーカス領域では、前記対物レンズのフォーカス状態を検出するフォーカス部から出力されたフォーカス状態情報に基づいて、前記対物レンズの光軸方向に沿った前記対物レンズと前記試料との相対位置を変えることによってフォーカスを合わせるフォーカス合わせ処理を行わせ、前記フォーカス外領域では、前記フォーカス合わせ処理を制限させて走査させる走査ステップと、を備える検査方法であって、前記複数のストライプ領域のうち、特定ストライプ領域における少なくとも前記フォーカス外領域を挟む2つの前記オートフォーカス領域を前記撮像位置が走査して、前記フォーカス合わせ処理を行うことにより、前記試料にフォーカスする前記対物レンズの位置情報を含むフォーカス情報を取得するフォーカス情報取得ステップと、前記フォーカス情報取得ステップにおいて取得した前記フォーカス情報に基づいて、前記特定ストライプ領域における前記フォーカス外領域の移動軌道を生成する軌道生成ステップと、をさらに備え、前記走査ステップでは、前記ストライプ領域における前記フォーカス外領域において、前記軌道生成ステップにおいて生成された前記移動軌道に基づいて、前記対物レンズの位置を前記対物レンズの光軸方向に変化させ、当該移動軌道で定まる位置からの前記フォーカス合わせ処理を制限させる。
【0007】
上記の検査方法では、前記フォーカス情報取得ステップは、前記特定ストライプ領域を前記撮像位置が走査して、前記フォーカス合わせ処理を行うことにより、前記特定ストライプ領域の前記フォーカス情報を取得し、前記区分ステップは、前記フォーカス情報取得ステップで取得した前記特定ストライプ領域の前記フォーカス情報に基づいて、前記特定ストライプ領域を前記オートフォーカス領域及び前記フォーカス外領域に区分してもよい。
【0008】
上記の検査方法では、前記軌道生成ステップは、前記フォーカス情報取得ステップにおいて取得した前記フォーカス外領域を挟む2つの前記オートフォーカス領域の前記フォーカス情報に対して、補間データ処理を行うことによって、前記特定ストライプ領域における前記フォーカス外領域の前記移動軌道を生成してもよい。
【0009】
上記の検査方法では、前記区分ステップは、特定ストライプと隣接する隣接ストライプに沿った隣接ストライプ領域を、前記特定ストライプ領域に対する区分に対応させて前記オートフォーカス領域及び前記フォーカス外領域に区分し、前記走査ステップは、前記隣接ストライプ領域における前記フォーカス外領域を、前記軌道生成ステップにおいて生成された前記特定ストライプ領域における前記フォーカス外領域の前記移動軌道に基づいて、前記一方向における前記特定ストライプ領域の走査と逆向きに走査しつつ、前記フォーカス合わせ処理を制限させてもよい。
【0010】
上記の検査方法では、前記区分ステップは、前記特定ストライプと隣接せず且つ前記隣接ストライプと隣接する第3ストライプに沿った第3ストライプ領域を、前記特定ストライプ領域に対する区分に対応させて前記オートフォーカス領域及び前記フォーカス外領域に区分し、前記軌道生成ステップは、前記隣接ストライプ領域に対する前記走査ステップにおいて取得した前記フォーカス情報であって、前記隣接ストライプ領域における前記フォーカス外領域を挟む2つの前記オートフォーカス領域の前記フォーカス情報に基づいて、前記隣接ストライプ領域における前記フォーカス外領域の前記移動軌道を生成させ、前記走査ステップは、前記第3ストライプ領域における前記フォーカス外領域を、前記隣接ストライプに対して生成された前記移動軌道に基づいて走査しつつ、前記フォーカス合わせ処理を制限させてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
甲神電機株式会社
電流センサ
19日前
甲神電機株式会社
電流検出器
19日前
甲神電機株式会社
漏電検出器
19日前
株式会社大真空
センサ
14日前
株式会社高橋型精
採尿具
20日前
東レ株式会社
液体展開用シート
6日前
ユニパルス株式会社
ロードセル
13日前
株式会社トプコン
測量装置
19日前
アズビル株式会社
熱式流量計
20日前
株式会社トプコン
植物センサ
2日前
キヤノン電子株式会社
サーボ加速度計
6日前
キヤノン電子株式会社
サーボ加速度計
6日前
株式会社クボタ
作業車両
5日前
キヤノン電子株式会社
サーボ加速度計
6日前
日本特殊陶業株式会社
ガスセンサ
20日前
豊田合成株式会社
表示装置
19日前
シャープ株式会社
収納装置
20日前
トヨタ自動車株式会社
画像検査装置
14日前
株式会社東京久栄
水中移動体用採水器
20日前
TDK株式会社
温度センサ
20日前
株式会社島津製作所
ガスクロマトグラフ
26日前
株式会社大真空
センサ及びその製造方法
13日前
横河電機株式会社
光源装置
20日前
ローム株式会社
MEMSデバイス
20日前
公立大学法人大阪
蛍光X線分析装置
14日前
ローム株式会社
MEMS装置
26日前
矢崎総業株式会社
サーミスタ
6日前
株式会社トーキン
電流センサ
5日前
タカハタプレシジョン株式会社
水道メータ
26日前
三菱電機株式会社
振動センサ
2日前
株式会社テクノメデイカ
採血分注システム
19日前
アズビル株式会社
熱式流量計および補正方法
26日前
トヨタ自動車株式会社
推薦方法
20日前
三菱電機株式会社
信号処理器及びレーダ装置
5日前
株式会社日本マイクロニクス
プローブ
13日前
株式会社日本マイクロニクス
プローブ
13日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ