TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025022928
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2024202989,2023523703
出願日
2024-11-21,2021-05-24
発明の名称
軌道計画装置
出願人
三菱電機株式会社
代理人
個人
,
個人
主分類
B60W
30/095 20120101AFI20250206BHJP(車両一般)
要約
【課題】走行可能領域が複雑な場合においても、走行可能領域を通って目的地へ到達することができる軌道計画装置を提供する。
【解決手段】移動体の軌道を計画する軌道計画装置であって、移動体の周辺情報に基づいて、移動体の走行可能領域を演算し、移動体の現在の位置と移動体の目標位置とを通る多項式を複数生成して多項式軌道とし、複数の多項式軌道に対し走行可能領域との距離に関する評価および走行可能領域内にあるかの評価を行い、評価結果に基づいて複数の多項式軌道のうち1つを生成軌道として選択し、移動体を制御する運動制御部に対し、生成軌道を出力する。
【選択図】図32
特許請求の範囲
【請求項1】
移動体の軌道を計画する軌道計画装置であって、
前記移動体の周辺情報に基づいて、前記移動体の走行可能領域を演算し、
前記移動体の現在の位置と前記移動体の目標位置とを通る多項式を複数生成して多項式軌道とし、
複数の前記多項式軌道に対し前記走行可能領域との距離に関する評価および前記走行可能領域内にあるかの評価を行い、
評価結果に基づいて複数の前記多項式軌道のうち1つを生成軌道として選択し、前記移動体を制御する運動制御部に対し、前記生成軌道を出力する、軌道計画装置。
続きを表示(約 720 文字)
【請求項2】
前記移動体の現在の位置を含む状態量に関する境界条件に基づいて、前記多項式を生成する、請求項1記載の軌道計画装置。
【請求項3】
前記移動体の前記目標位置を含む状態量に関する境界条件に基づいて、前記多項式を生成する、請求項2記載の軌道計画装置。
【請求項4】
現在よりも前に演算された過去の走行可能領域の形状の時系列変化に基づいて、現在の走行可能領域よりも未来の走行可能領域を予測して予測走行可能領域とし、前記現在の走行可能領域と前記予測走行可能領域とを合わせることで前記走行可能領域を延長する、請求項1記載の軌道計画装置。
【請求項5】
現在よりも前に演算された過去の走行可能領域の外側の障害物の種類に基づいて、現在の走行可能領域よりも未来の走行可能領域を予測して予測走行可能領域とし、前記現在の走行可能領域と前記予測走行可能領域とを合わせることで前記走行可能領域を延長する、請求項1記載の軌道計画装置。
【請求項6】
前記過去の走行可能領域の前記外側の障害物が、静止障害物の場合は、未来においても前記静止障害物より先の領域は走行不可の領域のままと判断し、前記外側の障害物が移動障害物の場合は、未来において、前記移動障害物の移動方向と移動速度に基づいて、前記走行可能領域を延長し、前記外側の障害物が無い領域では、前記移動体の速度に基づいて前記走行可能領域を延長する、請求項5記載の軌道計画装置。
【請求項7】
周辺環境情報に基づいて、前記移動体が将来走行できない領域を予測し、前記領域を除外して前記走行可能領域とする、請求項1記載の軌道計画装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、軌道計画装置に関し、特に、車両等の自動運転を実現するための動作を計画する軌道計画装置に関する。
続きを表示(約 3,400 文字)
【背景技術】
【0002】
近年、自動車の自動運転および搬送台車などの自律移動システムの開発が進んでいる。自律移動システムでは、移動体が走行すべき軌跡と速度で構成される軌道を生成し、生成された軌道に沿って移動体が走行するように制御される。軌道計画は、多くのシーンにおいて道路の中央および磁気マーカーなどの誘導体に沿うような軌道計画が立てられる。しかし場合によっては、道路の白線が無い料金所付近、未舗装路での走行シーンおよび誘導体を使用しない自律搬送台車が目的地へ移動するシーンにおいては、このような情報は使用できない。このようなシーンでは、走行すべき目印情報の無い空間上を、障害物を回避しつつ目的地へ到達することができる軌道が必要であり、例えば、特許文献1に開示されるように走行すべき目印情報が無くとも軌道計画を実現する技術が開発されている。
【先行技術文献】
【特許文献】
【0003】
特開2012-145998号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1においては、障害物の存在しない走行可能領域に内接する複数の円の中心点を通る線で構成される道なり方向に基づいて、走行経路を生成する方法が採られている。この場合、例えば空港のような非常に広い走行可能領域では、内接する円を決定できないため、走行経路を生成できず目的地へ到達できない。また、料金所付近のような、複雑な形状で横幅の変化が大きい走行可能領域では、正しい道なり方向を演算できず目的地へ到達できない。
【0005】
本開示は、上記のような問題を解決するためになされたものであり、空港および料金所付近などのように走行可能領域が複雑な場合においても、走行可能領域を通って目的地へ到達することができる軌道計画装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る軌道計画装置は、移動体の軌道を計画する軌道計画装置であって、前記移動体の周辺情報に基づいて、前記移動体の走行可能領域を演算し、前記移動体の現在の位置と前記移動体の目標位置とを通る多項式を複数生成して多項式軌道とし、複数の前記多項式軌道に対し前記走行可能領域との距離に関する評価および前記走行可能領域内にあるかの評価を行い、評価結果に基づいて複数の前記多項式軌道のうち1つを生成軌道として選択し、前記移動体を制御する運動制御部に対し、前記生成軌道を出力する。
【発明の効果】
【0007】
本開示に係る軌道計画装置によれば、複数の前記多項式軌道に対し走行可能領域との距離に関する評価および走行可能領域内にあるかの評価を行い、評価結果に基づいて複数の多項式軌道のうち1つを生成軌道として選択し、移動体を制御する運動制御部に対し、生成軌道を出力するので、走行可能領域が複雑な場合においても、走行可能領域を通って目的地へ到達することができる。
【図面の簡単な説明】
【0008】
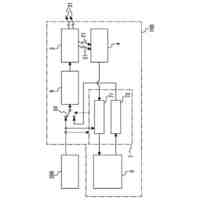
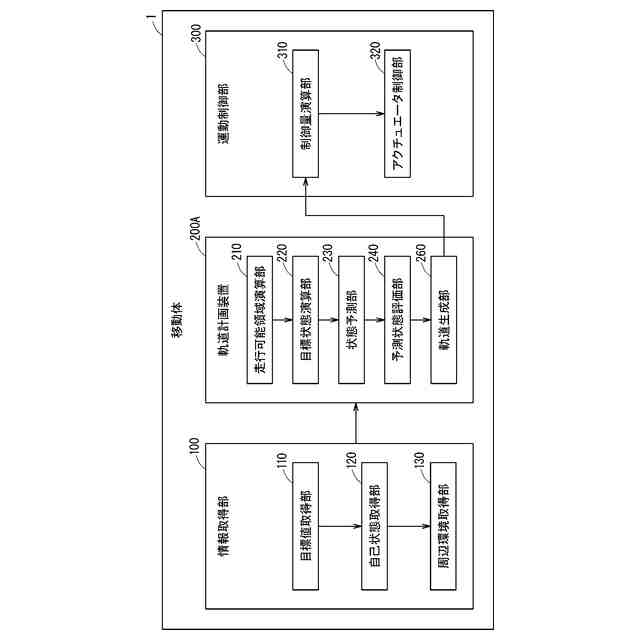
実施の形態1の軌道計画装置を搭載した移動体の概略構成の一例を示すブロック図である。
実施の形態1における走行可能領域の一例を示す図である。
実施の形態1における目標状態量の一例を示す図である。
実施の形態1の軌道計画装置において軌道点演算部が演算する軌道点の一例を示す図である。
実施の形態1の軌道計画装置において軌道生成部が生成する軌道の一例を示す図である。
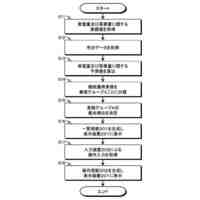
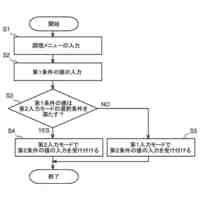
実施の形態1の軌道計画装置の動作を説明するフローチャートである。
実施の形態1の軌道計画装置において情報取得部からの取得する情報の一例を示す図である。
実施の形態1の軌道計画装置において情報取得部から取得した情報を移動体座標系に変換した一例を示す図である。
実施の形態1の軌道計画装置における走行可能領域の予測の一例を示す図である。
実施の形態1の軌道計画装置における走行可能領域の予測の他の例を示す図である。
実施の形態1の軌道計画装置における走行可能領域の一例を示す図である。
実施の形態1の軌道計画装置における走行可能領域の一例を示す図である。
実施の形態1の軌道計画装置における走行可能領域の一例を示す図である。
実施の形態1の軌道計画装置における目標状態量の一例を示す図である。
実施の形態1の軌道計画装置における再設定された目標状態量の一例を示す図である。
実施の形態1の軌道計画装置における目標状態量のうち速度の上限値を設定する一例を示す図である。
実施の形態1の軌道計画装置における目標状態量のうち速度の上限値を設定する一例を示す図である。
実施の形態1の軌道計画装置においてパーティクルフィルタにより予測された状態量の一例を示す図である。
実施の形態1の軌道計画装置において走行可能領域の形状に応じて設定された入力値の一例を示す図である。
実施の形態1の軌道計画装置において走行可能領域の形状に応じて設定された入力値の一例を示す図である。
実施の形態1の軌道計画装置において移動体の現在の状態量と目標状態量との乖離が大きい場合の入力値の設定の一例を示す図である。
実施の形態1の軌道計画装置における観測変数の一例を示す図である。
実施の形態1の軌道計画装置における走行可能領域外のパーティクルの重み付けの一例を示す図である。
実施の形態1の軌道計画装置における走行可能領域内のパーティクルの重み付けの一例を示す図である。
実施の形態1の軌道計画装置における走行可能領域内のパーティクルの重み付けの一例を示す図である。
実施の形態1の軌道計画装置における走行可能領域内のパーティクルの重み付けの一例を示す図である。
実施の形態1における予測された走行可能領域内のパーティクルの重み付けの一例を示す図である。
実施の形態1の軌道計画装置における評価の重みの設定の一例を示す図である。
実施の形態1の軌道計画装置において目標状態量に到達する複数の軌道点を得る処理の一例を示す図である。
実施の形態1の軌道計画装置において目標状態量に到達するまでの軌道生成の一例を示す図である。
実施の形態1の軌道計画装置において目標状態量に到達するまでの軌道生成の一例を示す図である。
実施の形態2の軌道計画装置を搭載した移動体の概略構成の一例を示すブロック図である。
実施の形態2の軌道計画装置において移動体と目標位置とを結ぶ多項式の導出方法を説明する図である。
実施の形態2の軌道計画装置において移動体と目標位置とを結ぶ多項式の導出方法を説明する図である。
実施の形態2の軌道計画装置において移動体と目標位置とを結ぶ多項式の導出方法を説明する図である。
予測状態量が、現在の移動体の状態量と大きく乖離している場合の重み付けを説明する図である。
予測状態量が、前回演算された軌道点の状態量と大きく乖離している場合の重み付けを説明する図である。
実施の形態1および2の軌道計画装置を実現するハードウェア構成を示す図である。
実施の形態1および2の軌道計画装置を実現するハードウェア構成を示す図である。
【発明を実施するための形態】
【0009】
<実施の形態1>
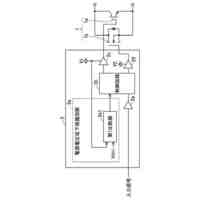
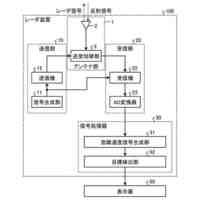
図1は、実施の形態1の軌道計画装置を搭載した移動体1の概略構成の一例を示すブロック図である。移動体1は、移動体1の到達すべき目的地情報、移動体1の周辺環境情報、および移動体1の自己状態を取得する情報取得部100から得られる情報に基づき、移動体1の通るべき軌道を生成する軌道計画装置200と、軌道計画装置200によって生成された軌道に基づいて移動体1の運動を制御する運動制御部300とを備えている。
【0010】
情報取得部100は、目標値取得部110、自己状態取得部120および周辺環境取得部130を有している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
掃除機
27日前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
電気機器
24日前
三菱電機株式会社
推定装置
2日前
三菱電機株式会社
歯車装置
24日前
三菱電機株式会社
送風装置
17日前
三菱電機株式会社
電子機器
17日前
三菱電機株式会社
換気装置
9日前
三菱電機株式会社
半導体装置
16日前
三菱電機株式会社
低歪増幅器
10日前
三菱電機株式会社
半導体装置
10日前
三菱電機株式会社
電力変換装置
10日前
三菱電機株式会社
空気処理装置
2日前
三菱電機株式会社
電磁波発生装置
27日前
三菱電機株式会社
食器洗い乾燥機
10日前
三菱電機株式会社
防災用照明装置
2日前
三菱電機株式会社
三次元造形装置
1か月前
三菱電機株式会社
走行計画生成装置
23日前
三菱電機株式会社
ふろ給湯システム
11日前
三菱電機株式会社
電力需給運用代行装置
3日前
三菱電機株式会社
半導体装置の製造方法
23日前
三菱電機株式会社
照明装置及び補正方法
23日前
三菱電機株式会社
トランス及び電力変換器
27日前
三菱電機株式会社
信号処理器及びレーダ装置
2日前
三菱電機株式会社
発光ユニット及び表示装置
17日前
三菱電機株式会社
半導体装置および電力変換装置
27日前
三菱電機株式会社
半導体装置および電力変換装置
9日前
三菱電機株式会社
情報処理装置及び情報処理方法
16日前
三菱電機株式会社
加熱調理器及び加熱調理システム
2日前
三菱電機株式会社
換気装置、学習装置及び推論装置
2日前
三菱電機株式会社
蓄電装置の制御方法および蓄電装置
23日前
三菱電機株式会社
半導体装置、および、電力変換装置
10日前
三菱電機株式会社
レーザ加工方法およびレーザ加工装置
10日前
三菱電機株式会社
フィルター清掃装置及びショーケース
27日前
三菱電機株式会社
インシデントレスポンス支援システム
2日前
三菱電機株式会社
食品情報提案装置及び食品情報提案方法
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ