TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025018060
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023121462
出願日
2023-07-26
発明の名称
レーザ加工方法およびレーザ加工装置
出願人
三菱電機株式会社
代理人
個人
主分類
B23K
26/04 20140101AFI20250130BHJP(工作機械;他に分類されない金属加工)
要約
【課題】作業者による教示精度のばらつきを防止し、高い作業効率で高精度なレーザ加工を行うことができるレーザ加工方法を得ること。
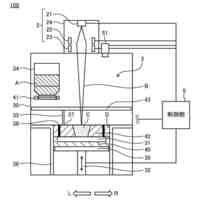
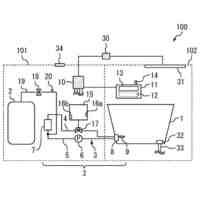
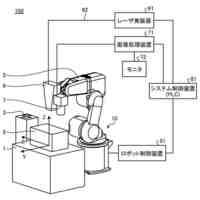
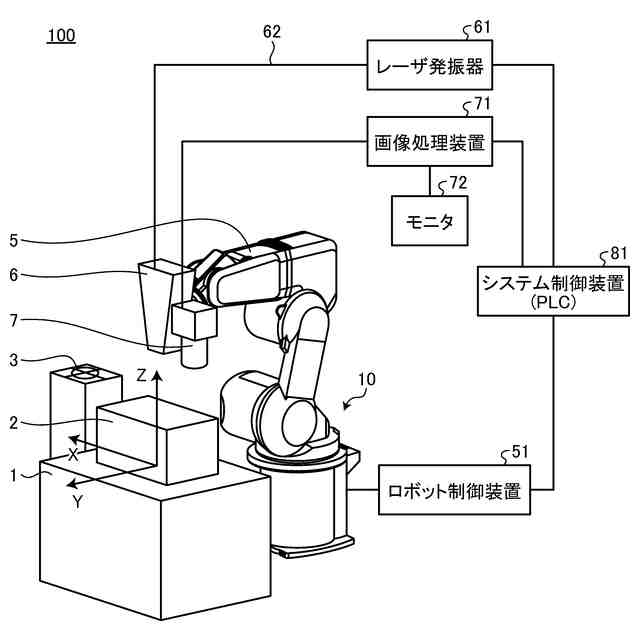
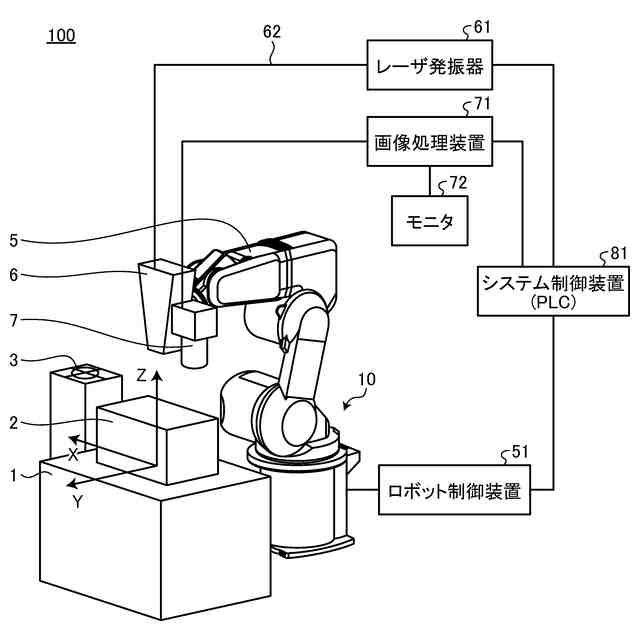
【解決手段】レーザ加工方法は、レーザ光の照射位置と、撮像カメラ7のカメラ中心の位置とのオフセット量を、校正治具3を用いて求める校正工程と、撮像カメラ7で加工点を捕捉するようにロボットアーム5を移動して、加工点の位置を教示する教示工程と、教示された加工点の位置にロボットアーム5を移動して、撮像カメラ7のカメラ中心と加工点とが一致するときのロボット座標を取得し、ロボット座標からオフセット量だけオフセットした位置にロボットアーム5を移動させて、加工点にレーザ光を照射する加工工程と、を含む。
【選択図】図1
特許請求の範囲
【請求項1】
レーザ光を照射するレーザ照射装置と加工点を撮像する撮像カメラとが設けられたロボットアームを有するロボットを用いて加工点のレーザ加工を行うレーザ加工方法であって、
前記レーザ光の照射位置と、前記撮像カメラのカメラ中心の位置とのオフセット量である第1オフセット量を、校正治具を用いて求める校正工程と、
前記撮像カメラで前記加工点を捕捉するように前記ロボットアームを移動して、前記加工点の位置を教示する教示工程と、
教示された前記加工点の位置に前記ロボットアームを移動して、前記撮像カメラのカメラ中心と前記加工点とが一致するときの第1ロボット座標を取得し、第1ロボット座標から前記第1オフセット量だけオフセットした位置に前記ロボットアームを移動させて、前記加工点にレーザ光を照射する加工工程と、を含む
ことを特徴とするレーザ加工方法。
続きを表示(約 1,400 文字)
【請求項2】
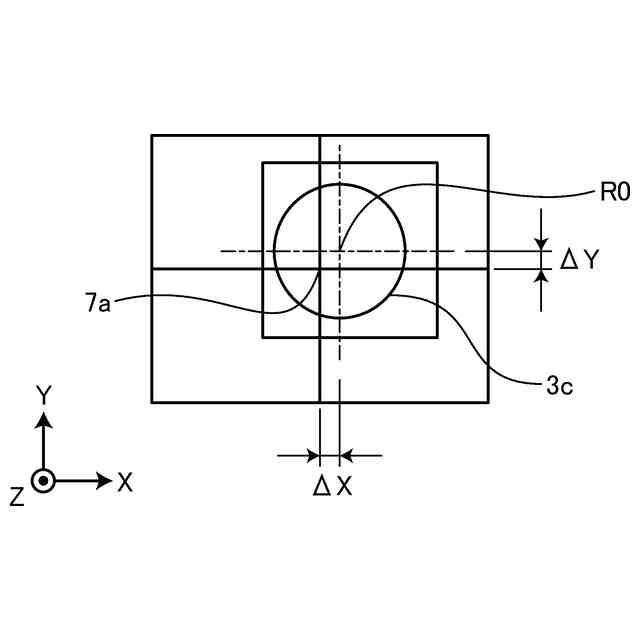
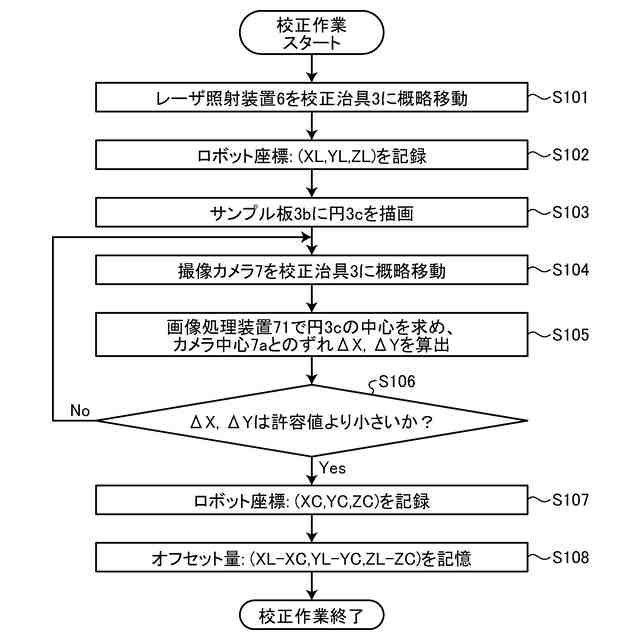
前記校正工程では、前記校正治具上にサンプル板を載置し、前記サンプル板の上に前記レーザ光で円を描画し、前記撮像カメラで前記円を撮像して前記円の中心座標から前記レーザ光の照射位置を決定し、前記第1オフセット量を求める
ことを特徴とする請求項1に記載のレーザ加工方法。
【請求項3】
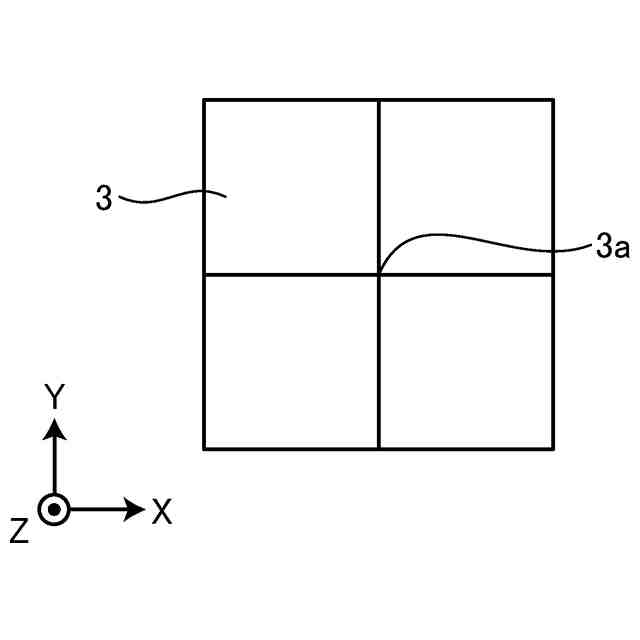
前記校正工程では、前記校正治具の上に設けられたクロスけがきを用いて、前記第1オフセット量を求める
ことを特徴とする請求項2に記載のレーザ加工方法。
【請求項4】
前記教示工程では、前記撮像カメラの概略中心に前記加工点を捕捉するように前記撮像カメラを移動する
ことを特徴とする請求項1に記載のレーザ加工方法。
【請求項5】
前記加工工程では、前記撮像カメラで前記加工点を撮像して、前記加工点の特徴抽出が行われる
ことを特徴とする請求項1に記載のレーザ加工方法。
【請求項6】
前記ロボットアームに、前記レーザ光の光軸方向の位置誤差を検出するためのレーザ変位計をさらに備え、
前記校正工程では、前記第1オフセット量を求めるとともに、前記レーザ変位計の計測位置と前記撮像カメラのカメラ中心とのオフセット量である第2オフセット量を求め、
前記加工工程では、教示された前記加工点の位置から前記第2オフセット量だけ前記ロボットアームを移動して、前記レーザ変位計によって前記加工点の前記レーザ光の光軸方向の誤差を検出し、前記誤差が補正された前記加工点の位置に前記ロボットアームを移動して、前記第1ロボット座標を取得する
ことを特徴とする請求項1に記載のレーザ加工方法。
【請求項7】
前記校正工程では、前記校正治具の上に設けられたクロスけがきを用いて、前記第1オフセット量および前記第2オフセット量を求める
ことを特徴とする請求項6に記載のレーザ加工方法。
【請求項8】
前記教示工程では、前記レーザ変位計で前記加工点を計測した後、前記第2オフセット量だけオフセットした位置に前記ロボットアームを移動させて、前記撮像カメラの概略中心に前記加工点が捕捉されたことを確認する
ことを特徴とする請求項6に記載のレーザ加工方法。
【請求項9】
前記加工工程では、前記第1ロボット座標を取得した後、前記第1ロボット座標から前記第1オフセット量だけオフセットした位置に前記ロボットアームを移動させて、前記加工点にレーザ光を照射する
ことを特徴とする請求項6に記載のレーザ加工方法。
【請求項10】
前記校正工程では、前記校正治具の上に載置したサンプル板に、前記サンプル板からの高さを変えながら前記レーザ照射装置から前記レーザ光を照射して前記サンプル板に円を描画し、描画された前記円を前記撮像カメラで撮像することで、前記サンプル板からの高さが変えられた複数の前記円の撮像画像を取得し、取得された撮像画像における複数の前記円の線幅に基づいて前記レーザ光の焦点と前記加工点とが一致する前記レーザ照射装置の前記レーザ光の光軸方向の位置を求める
ことを特徴とする請求項1または6に記載のレーザ加工方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、レーザ光を熱源として加工を行うレーザ加工方法およびレーザ加工装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
レーザ溶接、レーザ切断、レーザ穴あけ等を含むレーザ加工では、レーザ照射装置をロボットアームの先端に取り付けたレーザ加工用ロボットが用いられ、予め教示された加工線に沿ってレーザ照射装置を移動させてレーザ加工が行われる。レーザ溶接は、他の溶接に比べてエネルギーが一点に集中するため、高い位置決め精度が要求される。このため、レーザ溶接では、撮像カメラを用いて加工線を画像で確認し、ワークの加工誤差、ワーク搭載位置のずれを補正しながら、レーザ加工が行われる。
【0003】
特許文献1では、複数の製品のうちの基準となるマスタ製品における、溶接点に対して位置のずれが発生しない不変面におけるエッジ画像であるマスタ不変エッジ画像と、マスタ製品以外のワーク製品の不変面におけるエッジ画像であるワーク不変エッジ画像とをパターンマッチングさせて、両者のずれ量を溶接点に対する補正量として取得し、マスタを溶接加工するための加工プログラムで設定されている溶接点を、補正量だけ補正して、ワークを溶接加工するための補正加工プログラムを生成している。
【先行技術文献】
【特許文献】
【0004】
特開2015-213933号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に開示されている方法では、マスタ製品の溶接点の教示は作業者が実施する必要がある。このため、レーザ加工に必要な精度を得るのが困難であり、教示に時間がかかって作業効率が低下する、作業者の熟練度によって加工精度が左右されるなどの問題がある。
【0006】
本開示は、上記に鑑みてなされたものであって、作業者による教示精度のばらつきを防止し、高い作業効率で高精度なレーザ加工を行うことができるレーザ加工方法を得ることを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、本開示のレーザ加工方法は、レーザ光を照射するレーザ照射装置と加工点を撮像する撮像カメラとが設けられたロボットアームを有するロボットを用いて加工点のレーザ加工を行う。レーザ加工方法は、レーザ光の照射位置と、撮像カメラのカメラ中心の位置とのオフセット量である第1オフセット量を、校正治具を用いて求める校正工程と、撮像カメラで加工点を捕捉するようにロボットアームを移動して、加工点の位置を教示する教示工程と、教示された加工点の位置にロボットアームを移動して、撮像カメラのカメラ中心と加工点とが一致するときの第1ロボット座標を取得し、第1ロボット座標から第1オフセット量だけオフセットした位置にロボットアームを移動させて、加工点にレーザ光を照射する加工工程と、を含む。
【0008】
本開示のレーザ加工方法によれば、作業者による教示精度のばらつきを防止し、高い作業効率で高精度なレーザ加工を行うことができる、という効果を奏する。
【図面の簡単な説明】
【0009】
実施の形態1にかかるレーザ加工装置の構成を示す概略図
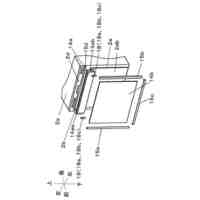
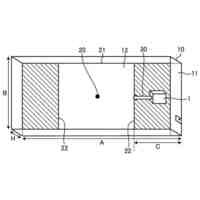
実施の形態1にかかるレーザ加工装置の校正治具を上方から見た平面図
実施の形態1にかかるレーザ加工装置の校正治具を校正工程の途中に上方から見た平面図
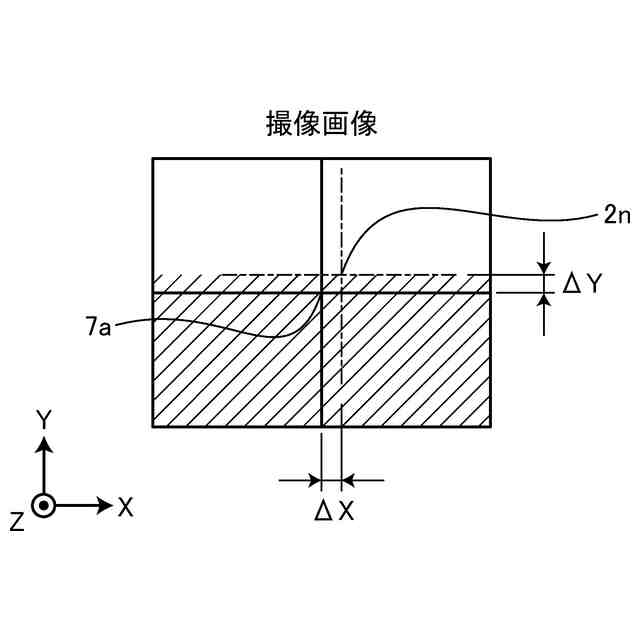
実施の形態1にかかるレーザ加工装置において、校正治具を撮像カメラで撮像した撮像画像を示す図
実施の形態1にかかるレーザ加工装置の校正工程の手順を示すフローチャート
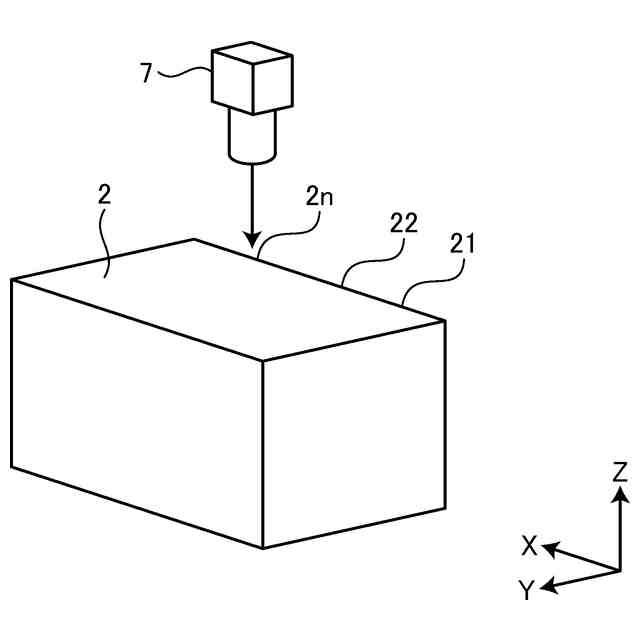
実施の形態1にかかるレーザ加工装置の教示工程を説明するための図
実施の形態1にかかるレーザ加工装置の教示工程において、加工点を画像認識するときの説明図
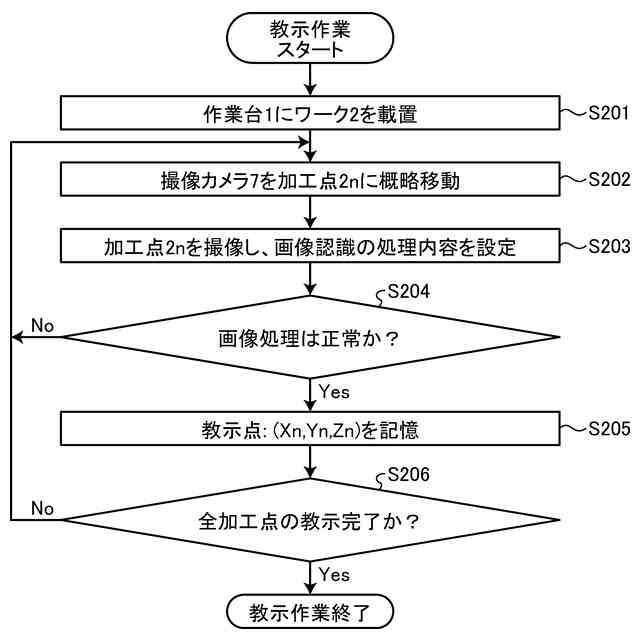
実施の形態1にかかるレーザ加工装置の教示工程の手順を示すフローチャート
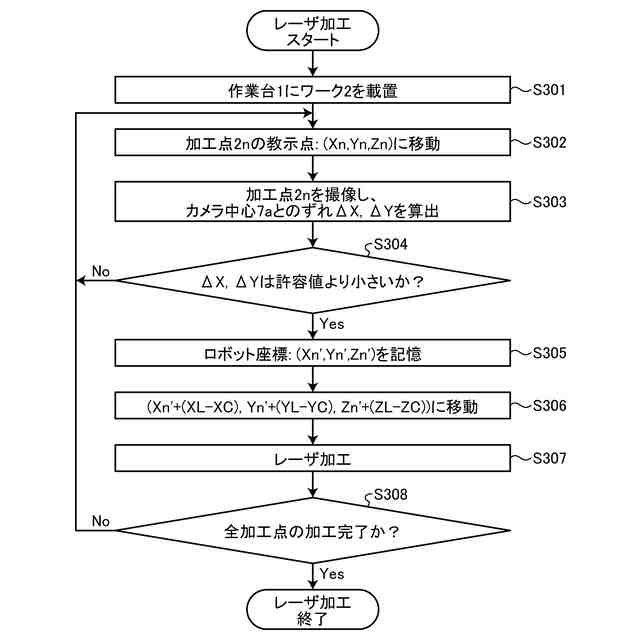
実施の形態1にかかるレーザ加工装置のレーザ加工工程の手順を示すフローチャート
実施の形態2にかかるレーザ加工装置の構成を示す概略図
実施の形態2にかかるレーザ加工装置のレーザ変位計についての校正工程の手順を示すフローチャート
実施の形態2にかかるレーザ加工装置の教示工程の手順を示すフローチャート
実施の形態2にかかるレーザ加工装置のレーザ加工工程の手順を示すフローチャート
実施の形態3にかかるレーザ加工装置において、レーザ照射位置の焦点高さ位置の教示工程の手順を示すフローチャート
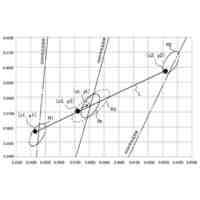
実施の形態3にかかるレーザ加工装置において、レーザ照射位置の焦点高さと線幅との関係を示す概略図
【発明を実施するための形態】
【0010】
以下に、実施の形態にかかるレーザ加工方法およびレーザ加工装置を図面に基づいて詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
掃除機
23日前
三菱電機株式会社
送風装置
13日前
三菱電機株式会社
電子機器
13日前
三菱電機株式会社
歯車装置
20日前
三菱電機株式会社
電気機器
20日前
三菱電機株式会社
換気装置
5日前
三菱電機株式会社
照明装置
26日前
三菱電機株式会社
半導体装置
6日前
三菱電機株式会社
半導体装置
12日前
三菱電機株式会社
低歪増幅器
6日前
三菱電機株式会社
電力変換装置
6日前
三菱電機株式会社
電磁波発生装置
23日前
三菱電機株式会社
三次元造形装置
26日前
三菱電機株式会社
食器洗い乾燥機
6日前
三菱電機株式会社
走行計画生成装置
19日前
三菱電機株式会社
ふろ給湯システム
7日前
三菱電機株式会社
照明装置及び補正方法
19日前
三菱電機株式会社
半導体装置の製造方法
19日前
三菱電機株式会社
トランス及び電力変換器
23日前
三菱電機株式会社
発光ユニット及び表示装置
13日前
三菱電機株式会社
半導体装置および電力変換装置
5日前
三菱電機株式会社
情報処理装置及び情報処理方法
12日前
三菱電機株式会社
半導体装置および電力変換装置
23日前
三菱電機株式会社
蓄電装置の制御方法および蓄電装置
19日前
三菱電機株式会社
半導体装置、および、電力変換装置
6日前
三菱電機株式会社
レーザ加工方法およびレーザ加工装置
6日前
三菱電機株式会社
フィルター清掃装置及びショーケース
23日前
三菱電機株式会社
食品情報提案装置及び食品情報提案方法
6日前
三菱電機株式会社
無線通信システム、および、無線通信方法
19日前
三菱電機株式会社
オゾン放出方法、オゾン放出装置および部屋
23日前
三菱電機株式会社
仕様変更提案システム及び仕様変更提案装置
13日前
三菱電機株式会社
制御装置、見守りシステムおよび見守り方法
7日前
三菱電機株式会社
喫食量検知ユニット及び喫食量管理システム
13日前
三菱電機株式会社
車載自動運転装置および自動運転車両システム
20日前
三菱電機株式会社
プリント配線板及びプリント配線板の設計方法
13日前
三菱電機株式会社
半導体デバイスの容量の測定装置および測定治具
6日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ